Изобретение относится к машиностроению, а именно к манипуляторам, собранным из звеньев и ориентируемым в пространстве вручную.
Целью изобретения является улучшение динамических характеристик, за счет минимальных потерь на трение и распгарение зоны обслуживания за счет обеспечения перемещения грузов по спирал.ьной траектории.
На фиг. 1 изображен манипулятор,
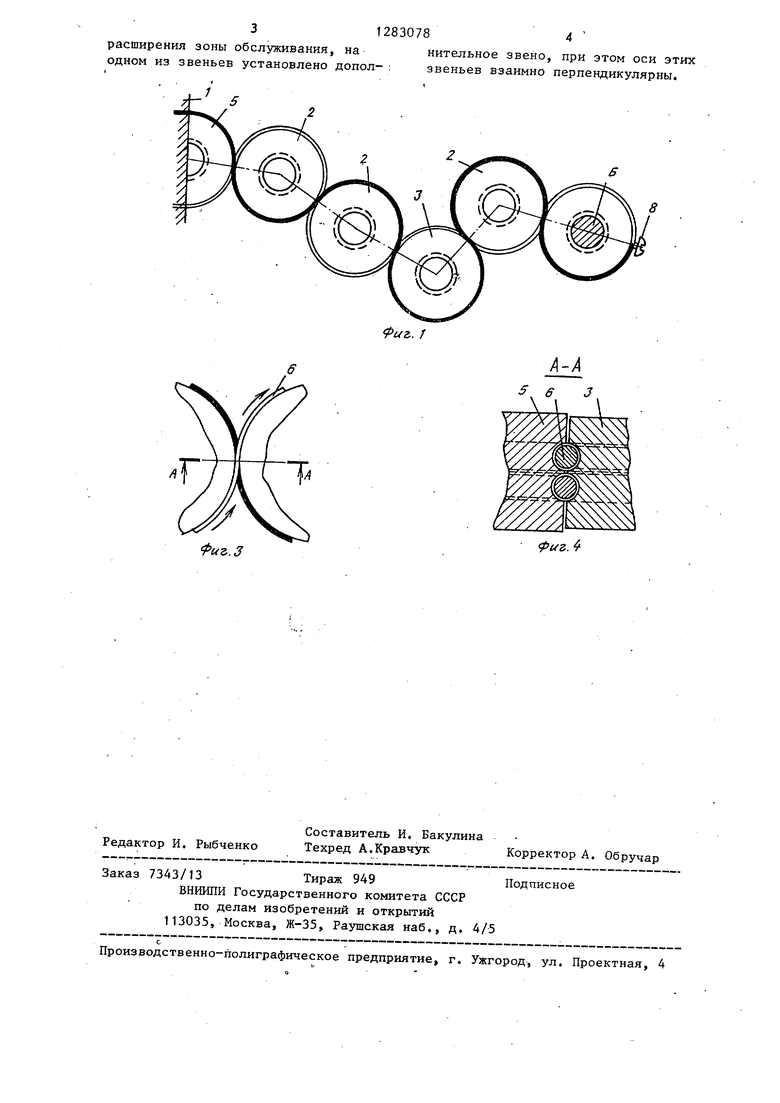
вид сбоку} на фиг. 2 - то же, вид Сверху, на фиг. 3 - место соединения смежных звеньев между собой гибкими элементами 6; на фиг. 4 - разрез А-А на фиг. 3.
Манипулятор, ориентируемый в пространстве вручную, содержит основание 1, звенья 2,.последовательно установленные с возможностью их взаимного обката и выполненные в виде двух дисков 3, жестко соединенных между собой, например, цилиндрическим эле- ментом 4. Звенья 2 могут быть разделе-.
35
40
ны пополам и между этими половинами установлен промежуточный элемент для удлинения каждого звена.
Первое звено 5 неподвижно закреплено на основании 1, выполненном под- ЗО вижным или неподвижным. Звенья 2 подвижно установлены между собой и относительно первого звена 5 с возможностью обката по цилиндрическим поверхностям дисков 3 этих звеньев и имеют на этих обкатываемых цилиндрических поверхностях пазы, предназначенные для предохранения и установки в них гибких элементов 6, например тросов, о::ватывающих смежные звенья с Двух сторон во встречном направлении охвата (в виде продолжающейся восьмерки) . Гибких элементов 6 должно быть не менее двух. Закрепление гиб-: ких элементов 6 на конечном звене 7 и первом звене 5 осуществляется винтовым креплением 8, удерживающим звенья 2 от проскальзьшания и перекосов. После натяжения гибких элементов такое крепление к поверхности звеньев 2 может устанавливаться, на каждом звене для обеспечения их устойчивости в работе.
На цилиндрических элементах 4 первого 5 и конечного 7 на звеньях 2 могут быть установлены контрольные и исполнительные механизмы (не указаны), полезная нагрузка Б манипулятора, Дпя расширения
Гибкий элемент 6 натягивают с возможно большим усилием с учетом полезной нагрузки и запаса прочности.Винтовые крепления 8 на звеньях затягивают. Одним манипулятором можно про- J5 изводить движение полезной нагрузки Б в горизонтальной плоскости. При наличии хотя бы двух звеньев, присоединенных под углом 90 (продольные оси которых перпендикулярны), манипулятор получает свободу передвижения и в вертикальной плоскости (по спиральной траектории). Кроме того, отклонение манипулятора в вертикальной плоскости может быть осуществлено перемещением основания 1.
Для устранения вибрации какого- либо устройства его можно установить одновременно на нескольких идентич- ньк манипуляторах, небольшие трения в звеньях этих манипуляторов могут гасить колебания, особенно горизонтальные.
25
45
Формула изобретения
1 . Манипулятор, ориентируемый ,в пространстве вручную, содержащий основание, звенья, последовательно установленные с возможностью их взаимного обката и соединенные между собой гибкими элементами, охватьша- ющими смежные звенья с противоположных сторон, при этом первое звено неподвижно закреплено на основании и на нем закреплены одни концы гибких элементов, а другие их концы закреплены на конечном звене, о т- личающийся тем, что, с целью улучшения динамических характеристик, каждое ззено выполнено в виде двух дисков, жестко соединенных между собой и имеющих на обкатывае- . мых цилиндрических поверхностях пазы, предназначенные для установки в них
звеньев, а также 55 гибких элементов, охватывающих смежные звенья с двух сторон во встречном направлении охвата.
2. Манипулятор поп, 1, о т л и- чающийся тем, что, с целью
50
зоны обслуживания на одном из звеньев, например первом звене 5 (половина элемента 2), устанавливают дополнительное звено (не показано) так, чтобы их продольные оси были перпендикулярны.
Манипулятор работает следующим образом.
Гибкий элемент 6 натягивают с возможно большим усилием с учетом полезной нагрузки и запаса прочности.Винтовые крепления 8 на звеньях затягивают. Одним манипулятором можно про- изводить движение полезной нагрузки Б в горизонтальной плоскости. При наличии хотя бы двух звеньев, присоединенных под углом 90 (продольные оси которых перпендикулярны), манипулятор получает свободу передвижения и в вертикальной плоскости (по спиральной траектории). Кроме того, отклонение манипулятора в вертикальной плоскости может быть осуществлено перемещением основания 1.
Для устранения вибрации какого- либо устройства его можно установить одновременно на нескольких идентич- ньк манипуляторах, небольшие трения в звеньях этих манипуляторов могут гасить колебания, особенно горизонтальные.
312830784
расширения зоны обслуживания, на нительное звено, при этом оси этих одном из звеньев установлено допол-; звеньев взаимно перпендикулярны.
. /
Фиг.З
фиг. 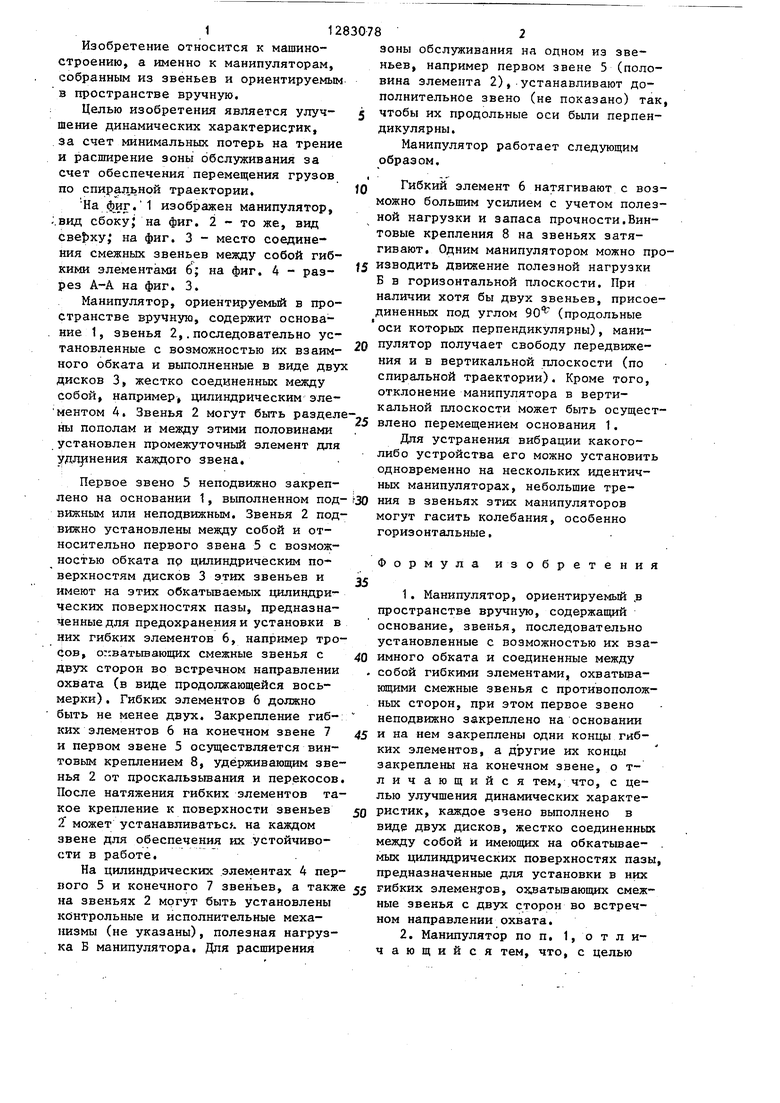
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор с программным управлением | 1972 |
|
SU510362A1 |
| Устройство для получения вращательного движения Абрамова Валентина Алексеевича (Абрамова В.А.) | 2016 |
|
RU2654690C9 |
| Манипулятор | 1984 |
|
SU1273243A1 |
| МАНИПУЛЯТОР | 2006 |
|
RU2305639C1 |
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ АБРАМОВА В. А. | 2016 |
|
RU2686648C9 |
| Рука манипулятора | 1987 |
|
SU1414642A1 |
| Гибкий исполнительный орган манипулятора | 2018 |
|
RU2691807C1 |
| Манипулятор | 1980 |
|
SU929430A1 |
| КОСМИЧЕСКАЯ ТЕРМОМЕХАНИЧЕСКАЯ СИСТЕМА ОРИЕНТАЦИИ НА СОЛНЦЕ | 1998 |
|
RU2134219C1 |
| МЕХАНИЧЕСКОЕ НАВОДЯЩЕЕ УСТРОЙСТВО | 2010 |
|
RU2439724C1 |
Изобретение относится к области машиностроения, а именно к манипуляторам, собранным из звеньев и ориентируемым в пространстве вручную. Целью изобретения является улучшение динамических характеристик за счет минимальных потерь на трение и расширение зоны обслуживания за счет обеспечения перемещения грузов по спиральной траектор1ш. Манипулятор со- . держит основание 1, звенья 2, вьтол- ненные в виде двух дисков 3, жестко соединенных между собой цилиндрическим элементом 4, установленные между собой и относительно первого звена 5 с возможностью обката по цилиндрическим поверхностям дисков 3-. На этих обкатываемых хщлиндрических поверхностях дисков 3 имеются пазы, предназначенные для предохранения и установки в них гибких элементов 6, охва- тьшаюпщх смежные звенья с двух сторон во встречном направлении охвата. Гибких элементов 6 должно быть не менее двух. Закрепление гибких элементов 6 на конечном звене 7 и первом звене 5 осуществляется винтоТвым креплением 8. 1 з.п. ф-лы. 4 ил. W С 8 to СХ) 00 о ч сх
Редактор И. Рыбченко
Составитель И. Бакулина
Техред А.Кравчук Корректор А. Обручар
Заказ 7343/13Тираж 949Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская каб., д. 4/5
с
производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| ВИХРЕВОЙ КОМПРЕССОР | 1972 |
|
SU436175A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
