1
Изобретение относится к промышленным манипуляторам, используемым преимущественно для нанесения лакокрасочных и защитных покрытий.
Известен манипулятор, содержащий основание, плечо с предплечьем, шарнирно соединенные с уравновешивающими механизмами, содержащими спи.ральную пружину, а также приводы линейного перемещения и поворота 1.
Недостатком известного манипулятора является его ограниченные технологические возможности и высокая энергоемкость привода.
Цель изобретения - расширение технологических возможностей и снижение энергоемкости привода.
Цель достигается тем, что манипулятор снабжен двумя щатунами, а каждый уравновещивающий механизм - двуплечим рычагом и диском с гнездами, причем плечо, предплечье и шатуны шарнирно связаны между собой и образуют параллелограммный механизм, а диск с гнездами установлен на одном из щатунов и на этом диске закреплен внутренний конец спиральной пружины механизма уравновешивания, на-
ружный конец которой соединен с одним плечом двуплечего рычага. Кроме того, диск с гнездами снабжен барабаном, жестко связанным с этим диском, а спиральная прул ина размещена внутри барабана, причем
5 внутренний ее конец закреплен на оси барабана, при этом двуплечий рычаг связан с диском посредством дополнительно введенной гибкой связи.
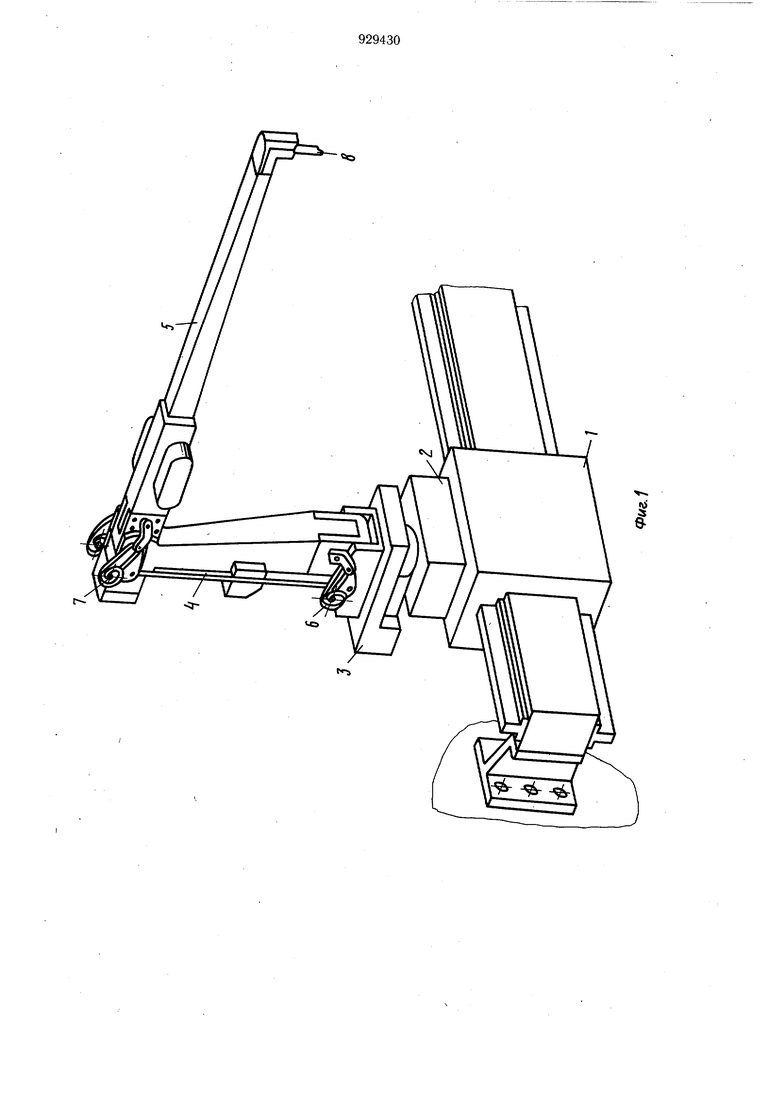
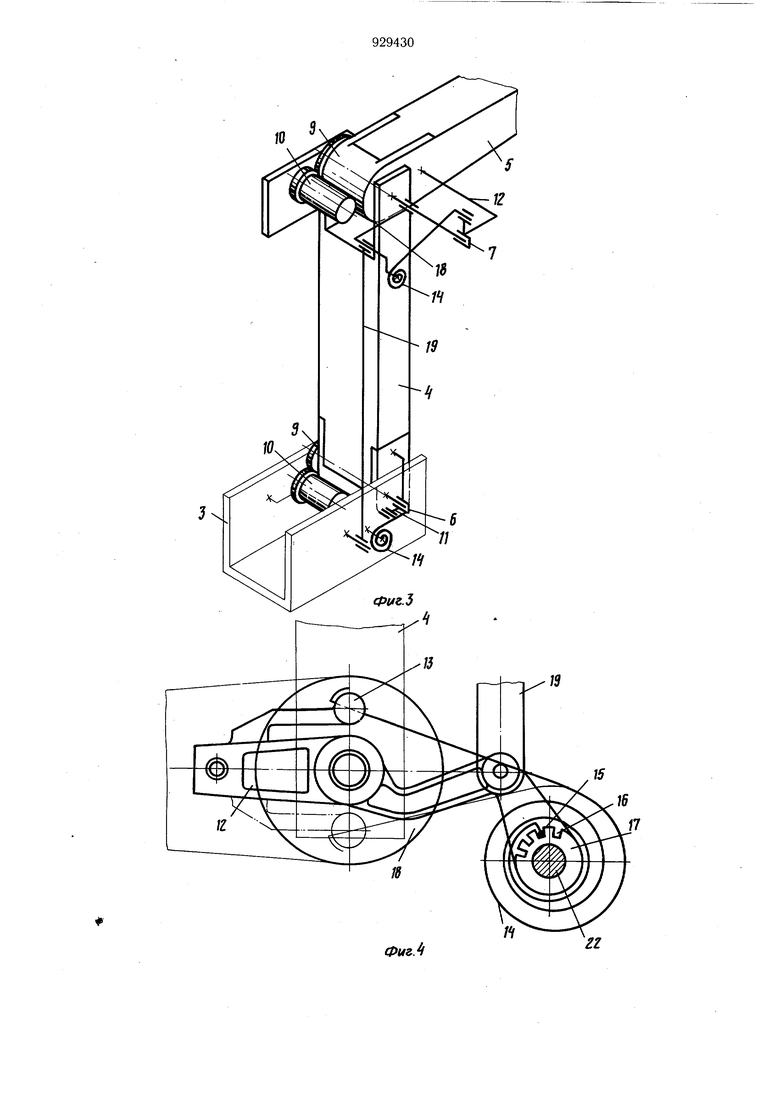
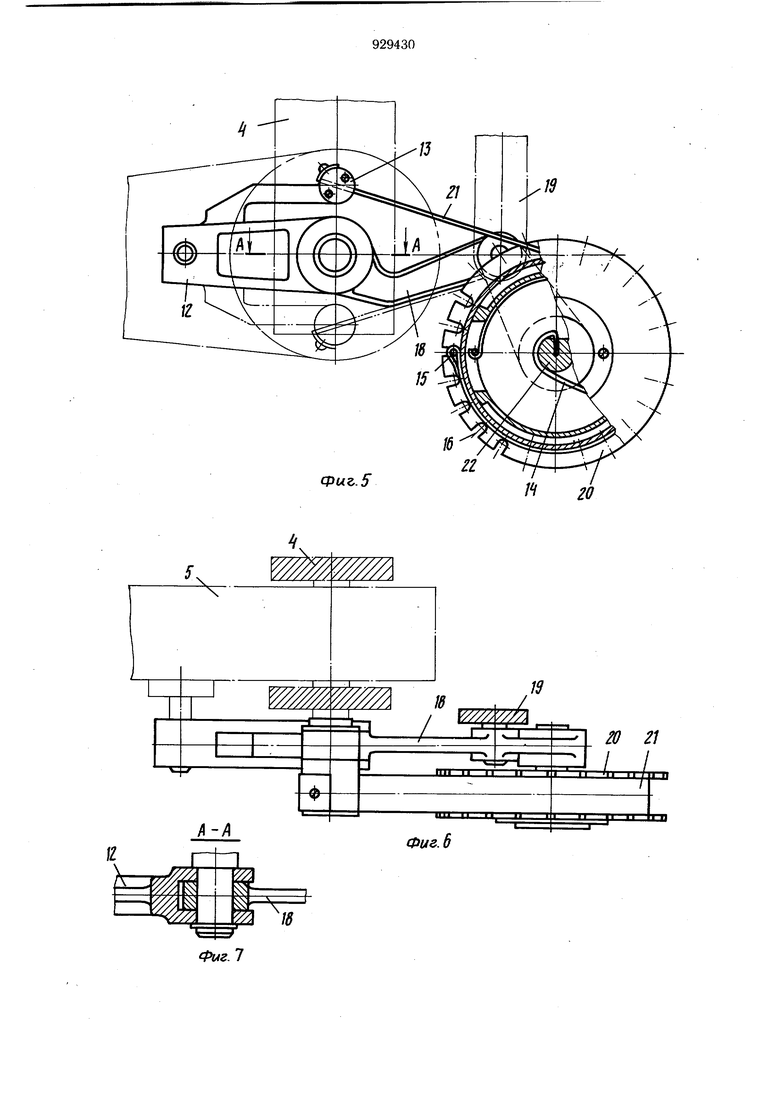
На фиг.. 1 представлен напорный ва1Q риант компановки манипулятора; на фиг. 2 портальный вариант компановки манипулятора; на фиг. 3 - кинематическая схема связи плеча и предплечья; на фиг. 4 - уравновещивающий механизм; на фиг. 5 - то же, вариант выполнения с барабаном;
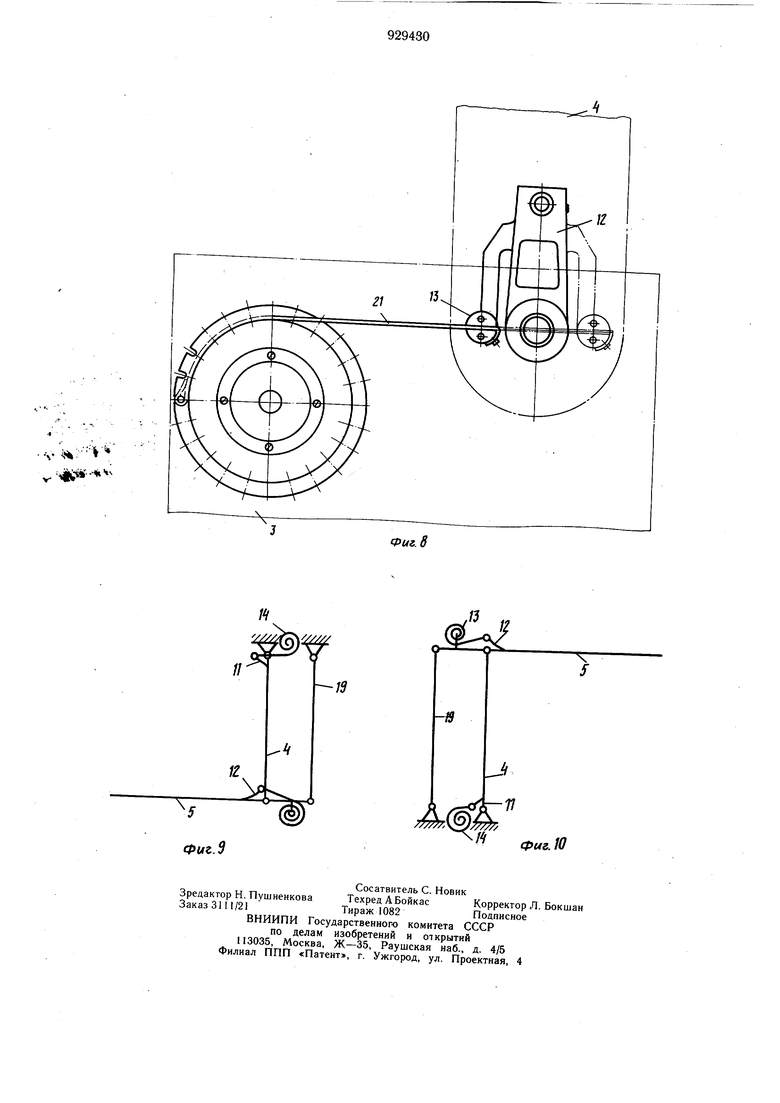
5 на фиг. 6 - разрез А-А на фиг. 5; на фиг. .7 - уравновешивающий механизм с барабаном, вид сверху; на фиг. 8 - схема установки двуплечего рычага на плече при напольном и портальном вариантах ком20 пановки; на фиг. 9 - кинематическая схема портальной компановки манипулятора; на фиг. 10 - кинематическая схема наполного варианта компановки манипулятора.
При напольном варианте (фиг. 1) манипулятор может содержать привод 1 продольного линейного перемещения, привод 2 поворота, основание 3, плечо 4 и предплечье 5, механизм 6 уравновешивания плеча, механизм 7 уравновешивания предплечья, инструмент 8. В аналогичном варианте может компоноваться и портальнь й вариант манипулятора (фиг. 2). Каждый из неполноповоротных гидродвигателей 9 (фиг. 3) кинематически связаны с соответствующими датчиком 10 углов поворота. Механизмы 6 и 7 уравновешивания являются и идентичными и отличаются только сочленением входного и выходного звеньев. Одно плечо каждого из двуплечих рычагов 11 и 12 соединено с уравновешивающим плечом 4 и предплечьем 5, а второе каждого из них снабжено шарниром 13 (фиг. 4). В нем закреплен наружный конец спиральной пружины 14, а внутренний ее конец снабжен стопором 15, установленным в одном из пазов 16 диска 17. Диск 17, в зависимости от варианта компоновки, устанавливается, на основании 3 или на параллелограммном механизме, образованном шатунами 18 и 19, плечом 4, предплечьем 5. Диск 17 может быть изготовлен с барабаном 20, жестко закрепленным на нем, наружная поверхность которого охвачена гибкой нитью 21, один конец которой закреплен в пазу 16 барабана 20, а другой - в шарнире 13. Гибкая нить (лента) 21 используется в качестве промежуточного звена между спиральной пружиной 14 и шарниром 13 для удобства монтажа и обслуживания (фиг. 4) и может быть исключена за счет крепления наружного конца спиральной пружины 14 на шарнире 13. При этом вместо барабана 20 может быть использован диск 17, закрепленный неподвижно на оси 22 и снабженный радиальными пазаМИ 16, в одном из которых размещается стопор 15, но уже смонтированный не в гибкой нити 21, а на внутреннем конце спиральной пружины 14 (фиг. 4). При первом варианте исполнения монтаж уравновешивающего гравитационные силы механизма 7 осуществляется путем соединения внутреннего конца спиральной пружины 14 с осью 22, а наружного ее конца - со стопором 15, расположенным внутри барабана 20. После его поворота на угол, обеспечивающий достижение рабочей зоны характеристики спиральной пружины 14, стопор 15 гибкой нити 21 устанавливают Б соответствующий паз 16 на барабане 20. Причем в зависимости от варианта компоновки-напольного (фиг.1) или портального (фиг. 2) -двуплечий рычаг устанавливается на своей оси шарниром 13 во внутрь четырехщарнирного параллелограмма, образованного основанием 3 плечом 4 и щатунами 18 и 19, или на внещней его стороне. Работа манипулятора идентичная при любом варианте компоновки (фиг. 9, 10). Предварительное нагружение спиральной пружины 14 производится путем установки стопора 15 в паз 16 до достижения начального участка характеристики спиральной пружины 14, близкой к пропорциональной зависимости между величиной передаваемого момента и углом поворота пружины. Прричем этот момент должён соответствовать моменту, создаваемому уравновешиваемыми частями манипулятора и размещенным на нем инструментом 8. Если уравновешивающий гравитационные силы механизм выполнен с барабаном 20 И гибкой нитью 21 (фиг. 5), то спиральная пружина 14 размещается внутри барабана 20 при этом внутренний конец ее закрепляется на оси 22, а наружньш - на барабане 20. Один конец гибкой нити 21, устанавливается в щарнире 13, а другой после поворота барабана на угол, определяемый характеристикой спиральной пружины 14, устанавливается в соответствующий паз 16. При опускании предплечья 5, оно поворачивается вокруг оси, соединяющей его с плечом 4, при этом конец гибкой нити 21, закрепленный в щарнире 13, перемещается в пространстве по круговой траектории вместе с предплечьем 5, так как двуплечий рычаг 12 зафиксирован относительно предплечья 5. Шарнир 13, перемещаясь в обе стороны от нейтрального по/1ожения (фиг. 5), тянет влево и опускает направо гибкую нить 21, на которую воздействует момент от спиральной пружины 14. Ввиду того, что шарнир 13 расположен на плече (фиг. 9) двуплечего рычага 12 и приложение тянущего усилия к гибкой нити 21 или спиральной пружины 14 меняет свое положение относительно оси поворота уравновешиваемого звена, то возникает составляющая, противодействующая силе гравитации уравновешиваемых частей манипулятора. Закрепление конца гибкой нити 21 или спиральной пружины 14 при варианте с диском 17 без барабана 20, в шарнире 13 производится для того, чтобы устранить напряжение изгиба в гибкой нити 21 или пружине 14. Скручивание спиральной пружины 14 удобнее производить, когда она размещена внутри барабана 20, жестко связанного с диском 17. При этом он устанавливается на ось 22. Барабан 20 обеспечивает аащиту спиральной пружины 14 от распыляемой краски, улучшает сохранность смазки на пружине, необходимость которой особенно важна при количестве витков более десяти и частом изменении положения уравновешиваемого элемента. Кроме того, при монтаже спиральной пружины 14 исключена деформация ее вдоль оси 22, что очень важно, так как усилие предварительного натяга может составлять несколько десятков килограммов. Таким образом, заключение спиральной пружины 14 в барабане 20 облегчает как монтаж и эксплуатацию, так и эксплуатационные возможности - использовать в условиях окрасочных камер. В зависимости от характеристики спиральной пружины 13 и веса плеча 4, предплечья 5, на каждый из них может быть установлен один или два уравновешиваемых механизма и в последнем случае их целесообразно располагать симметрично с двух сторон. При трансформации из наполного варианта (фиг. 1) в портальный (фиг. 2) необходимо осуществить переустановку двуплечего рычага 11 на своей оси относительно плеча 4, (фиг. 8). Первый вариант (фиг. 1) используется в основном для окраски наружных поверхностей изделий, например баков или изделий типа конус, ванна. Второй вариант (фиг. 2) используется для окраски верха крупно-габаритных изделий типа вагон и использовать совместно с первым вариантом. В зависимости от типа изделий и способа транспортировки изделий через окрасочную зону привод I продольного перемещения может быть заменен фундаментом или предплечье 5 может быть соединено непосредственно с основанием 3, которое в свою очередь может быть установлено на привод 2 поворота и привод 1 Продольного перемещения. Предлагаемый манипулятор обладает значительно меньшей энергоемкостью за счет снижения массы подвижных частей и практически полной уравновешенностью в центральной зоне обслуживания. При трансформации из наполного варианта КОМПОНОВКИ (фиг. 1) в портальный (фиг. 2) потребуется только переустановка двуплечих рычагов 11 и 12 из положения показанного на фиг. 5 и фиг. 8 контурной линией в положение, показанное штрихпунктирной линией и перезакрепления концов спиральной пружины 14 или гибкой нити 21. Формула изобретения 1. Манипулятор, содержащий основание, плечо с предплечьем, щарнирно соединенные с уравновещивающими механизмами, содержащими спиральную пружину, а также приводы продольного перемещения и поворота, отличающийся тем, что, с целью расширения технологических возможностей и снижения энергоемкости привода, он снабжен двумя щатунаМи, а каждый уравновешивающий механизм - двуплечим рычагом и диском с гнездами, причем плечо. предплечье и щатуны шарнирно связаны между собой и образуют параллелограммныи механизм, диск с гнездами установлен на одном из ползунов и на этом диске закреплен внутренний конец спиральной пружины механизма уравновешивания, наружный конец которой соединен с одним плечом двуплечего рычага. 2. Манипулятор по п. 1, отличающийся тем, что диск с гнездами снабжен барабаном, жестко связанным с этим диском, а спиральная пружина размещена внутри барабана, причем внутренний конец последней закреплен на оси барабана, а наружный - на боковой стенке барабана, при этом двуплечий рычаг связан с диском посредством дополнительно введенной гибкой связи, Источники информации, принятые во внимание при экспертизе 1. Заявка ФРГ № 2831361, кл. В 5 Э 9/00, опублик 1980.
Фиг.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1983 |
|
SU1106652A1 |
| Механизм локтевого шарнира | 1982 |
|
SU1024080A1 |
| Промышленный робот | 1983 |
|
SU1090546A1 |
| Манипулятор | 1983 |
|
SU1183360A1 |
| Манипулятор | 1982 |
|
SU1085804A1 |
| Задающий орган манипулятора | 1976 |
|
SU564150A1 |
| УСТРОЙСТВО ДЛЯ СЕПАРАЦИИ ЗЕРНА | 2003 |
|
RU2238804C1 |
| Копирующий манипулятор | 1979 |
|
SU854707A1 |
| Манипулятор | 1989 |
|
SU1662840A1 |
| Рука манипулятора | 1983 |
|
SU1133085A1 |

W
/
№
У/77
Л
/ /
т:
irZEEi
зг
f(/2
W
Фиг. 7
Фиг. 6
V
V-
0
Л
S
