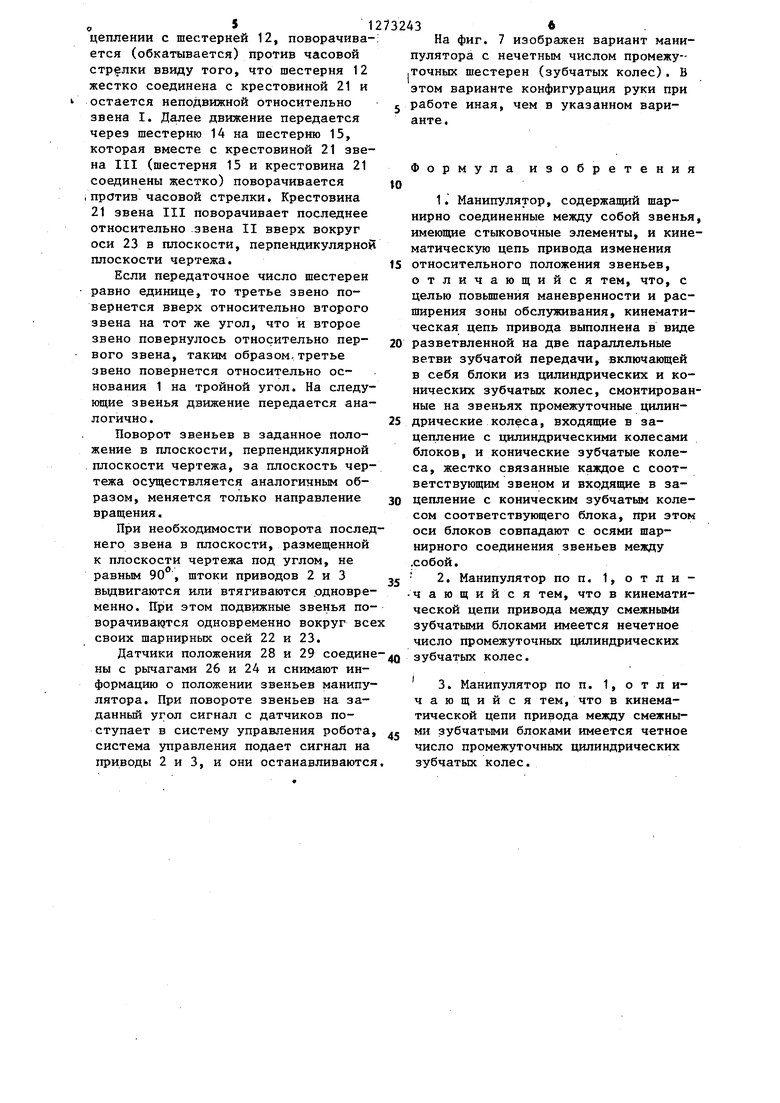
25 S if 2724 А-А 820 3 OfS 23 К 12 22 2J 13 Jtf 201521 I Изобретение относится к робототех нике и может быть использовано в про мьгашенных роботах различного назначений, манипуляторы которых включают шарнирно сочлененные звенья. Цель изобретения - повышение маневренности и расширение зоны обслуживания . На фиг. 1 схематически изображен манипулятор,общий вид; на фиг. 2 кинематическая схема, разрез А-А на фиг. 1; на фиг. 3 - то же, разрез Б-Б на фиг. 2; на фиг. 4 - вид В на фиг. 2; на фиг. 5 - вид Г на фиг. 2, на фиг. 6 - взаимное положение двух унифицированных звеньев; на фиг.7 вариант исполнения. Манипулятор (фиг.1) содержит осно вание 1, на котором установлены гидроцилиндры приводов 2 и 3 со штоками 4 и 5 и исполнительный орган, состоящий из шарнирно сочлененных унифицированных звеньев 6 и кисти, также составленной из унифицированных звеньев того же или другого типоразмера с захватом 7. Кисть закре лена на звене с продольным перемещением. Каждое звено 6 содержит две ветв кинематической зубчатой передачи (фиг. 6,2 и 3), составленные из четырех взаимно сцепленных шестерен (зубчатых колес) 8-11 и 12-15. Четное число шестерен обеспечивает вра щение крайних шестерен в противоположные стороны. Шестерни одной пере чи установлены соосно шестерням дру гой передачи. Все шестерни передач закреплены на корпусе 16 звена с во можностью свободного вращения. Соосно крайним шестерням 8 и 11 первой кинематической передачи уста новлены на корпусе 16 с возможность вращения конические шестерни 17 и 1 жестко соединенные с шестернями В и 11 и образующие с ними блоки, Соосно крайним шестерням 12 и 15 второй кинематической передачи на корпусе неподвижно закреплены конические шестерни 19 и 20. Каждое звено снабжено крестовино 21 с осями 22 и 23. Ось 22 крестови ны своими концами связана с осями крайних шестерен 8 и 12, причем с шестерней 12 жестко, а с шестерней 8 с возможностью вращения. Концы второй оси 23 крестовины первого зв на (фиг.2) соединены со штоками 4 43 и 5 гидроцилиндров, причем первый шток 4 соединен с концом оси 23 крестовины непосредственно через рычаг 24. Рычаг 24 на крестовине закреплен жестко, а на штоке - шарнирно (фиг. 2 и 5). На втором конце оси 23 установлена шестерня 25, ось которой соединена со штоком 5 через рычаг 26. Рычаг 26 соединен со штоком шарнирно, а с осью шестерни-жестко (фиг. 2 и-4). Шестерня 25 связана зацеплением с неподвижной конической шестерней 19. Коническая шестерня 17 соединена с шестерней 27, установленной соосно с осью 23 крестовины и неподвижно закрепленной на основании 1. Звенья сочленены друг разворотом относительно с другом с продольной оси Б-Б на 90°. Крестовина 21 последующего звена соединена с предьщущим звеном таким образом, что ее свободная ось 23 установлена соосно с осями крайних шестерен 11 и 15 предьщущего звена, причем с шестерней 15 неподвижно, а с шестерней 11 с возможностью вращения. Подвижная коническая шестерня 17 последующего звена зацеплена с неподвижной шестерней 20 предьщущего звена. Подвижная коническая шестерня 18предьщущего звена зацеплена с первой неподвижной конической шестерней 19последующего звена. Последующие звенья соединяются аналогичным образом, как показано на фиг.6. Датчики положения звеньев 28 и 29 установлены на основании 1 и соединены с рычагами 24 и 26. Манипулятор работает следующим образом. При повороте звеньев в заданное положение, например, в плоскости чертежа вверх (фиг.2), в гидроцилиндр 2 подается рабочая жидкость под давлением. Шток 5 гидроцилиндра вьщвигается и поворачивает рычаг 26 и шестерню 25 по часовой стрелке (по стрелке В), так как они жестко соединены. Шестерня 25 поворачивает шестерню 19 против часовой стрелки. Так как шестерня 19 жестко соединена с корпусом 16 предьщущего звена 1, то оно поворачивается относительно основания 1 вокруг оси 22 вверх. При повороте звена I шестерия 13, соединенная с шестерней 12, начинает поворачиваться (обкатываться) против часовой стрелки, так как шес3терня 12 соединена с крестовиной 21 и остается неподвижной относительно основания 1е Движение через шестерню 14 передается на шестерню 15, ко торая поворачивается против часовой стрелки. Шестерня 15 жестко соединена с крестовиной 21 последующего звена, поэтому крестовина 21 этого звена поворачивается относительно предыдущего звена Т против часовой стрелки. Крестовина 21 поворачивает указанное звено относительно предыдущего звена вверх вокруг оси 23. Если передаточное число шестерен равно единице, то последующее звено повернется вверх относительно пре- дьщущего звЁна на тот же угол, что и звено предыдущее (первое) относитель но основания 1. Таким образом второе звено манипулятора повернется относительно основания 1 -ла двойной угол Так как второе звено поворачивается относительно первого ззьна вверх, то шестерня 17 второго звена находя щаяся в зацеплении с шестерней 20 первого звена, начинает поворачивать ся (обкатываться по шестерне 20) про тив часовой стрелки за счет того, что шестерня 20 неподвижно соединена с первым звеном, соответственно поворачивается против часовой стрелки и шестерня 8 второго звена, которая жестко соединена с шестерней 17. Далее движение передается через шестерни 9 и 10 второго ззена на шестерню 11. Шестерня 11 второго звена вместе с шестерней 18 (они жестко соединены) поворачивается по часовой стрелке относительно этого зве на вокруг оси 23. Шестерня 18 этого зве на находится в зацеплении с шестерней 19 следующего третьего звена и поворачивает ее против часовой стрелки. Так как шестерня 19 жестко соединена с третьим звеном, это звено поворачивается относительно второго звена вверх вокруг оси 22. Если передаточное число шестерен равно единице, то третье звено повернется вверх относительно второго звена на тот же угол, что и это звено повернулось относительно первого звена Таким образом, третье звено повернется относительно основания 1 на тройной угол. Далее на следующие зве нья движение передается аналогично. Таким образом, если манипулятор (рука робота) составлена из h подвиж243ных звеньев, то последнее звено повернется относительно неподвижного звена на угол of . п , где Л - угол поворота первого подвижного звена относительно неподвижного. Поворот Звеньев в заданное положение, в плоскости чертежа вниз, осуществляется аналогичным образом, меняется только направление вращения. При повороте звеньев в заданное положение в плоскости, перпендикулярной плоскости чертежа (вверх), манипулятор работает следукщим образом. В гидроцилиндр 3 подается рабочая жидкость под давлением, шток 4 гидроцилиндра втягивается и поворачивает рычаг 24 и крестовину 21 звена I против часовой стрелки (по стрелке В), так как они жестко соединены. Крестовина 21 поворачивает звено I относительно основания 1 вокруг оси 23 вверх в плоскости, перпендикулярной плоскости чертежа. Так как звено I поворачивается относительно основания 1 вокруг оси 23, то шестгри,/ 17 звена I поворачивается (обкатывается) относительно звена I против часовой стрелки за счет того, что шес терня 17 находится в зацеплении с шестерней 27, которая неподвижно закреплена на основании 1. Шестерня 8 звена I также поворачивается против часовой стрелки, так как шестерня 8 жестко соединена с шестерней 17. Движение через шестерни 9 и 10 звена I передается шестерне 11, которая вместе с шестерней 18 поворачивается по часовой стрелке (шестерни 11 и 18 соединены жестко). Шестерня 18 звена I находится в зацеплении с шестерней 19 звена II и поворачивает ее против часовой стрелки (по стрелке В). Так как шестерня 19 неподвижно соединена со звеном II, то звено II поворачивается относительно звена I вокруг оси 22 вверх в плоскости, перпендикулярной плоскости чертежа (фиг.2). Если передаточное число шестерен равно единице, то последующее звено повернется относительно предьщущего звена на тот же угол, что и предыдущее звено повернулось относительно основания 1, таким образом звено II повернется относительно основания I на двойной угол. Так как звено II поворачивается относительно звена I вокруг оси 22 вверх, то шестерня 13 звена II, находящаяся в заS1цеплении с шестерней 12, поворачивается (обкатывается) против часовой стрелки ввиду того, что шестерня 12 жестко соединена с крестовиной 21 и остается неподвижной относительно звена I. Далее движение передается через шестерню 14 на шестерню 15, которая вместе с крестовиной 21 звена III (шестерня 15 и крестовина 21 соединены жестко) поворачивается .против часовой стрелки. Крестовина 21 звена III поворачивает последнее относительно звена II вверх вокруг оси 23 в плоскости, перпендикулярной плоскости чертежа. Если передаточное число шестерен равно единице, то третье звено повернется вверх относительно второго звена на тот же угол, что и второе звено повернулось относительно первого звена, таким образом.третье звено повернется относительно основания 1 на тройной угол. На следующие звенья движение передается аналогично. Поворот звеньев в заданное положение в плоскости, перпендикулярной плоскости чертежа, за плоскость чертежа осуществляется аналогичным образом, меняется только направление вращения. При необходимости поворота послед него звена в плоскости, размещенной к плоскости чертежа под углом, равным 90, штоки приводов 2 и у 111 1 .1,П , ff in J выдвигаются или втягиваются .одновременно. При этом подвижные звенья поворачивангтся одновременно вокруг все своих шарнирных осей 22 и 23. Датчики положения 28 и 29 соедине ны с рычагами 26 и 24 и снимают информацию о положении звеньев манипулятора. При повороте звеньев на заданный угол сигнал с датчиков поступает в систему управления робота, система управления подает сигнал на приводы 2 и 3, и они останавливаются 3 На фиг. 7 изображен вариант манипулятора с нечетным числом промежуточных шестерен (зубчатых колес). В этом варианте конфигурация руки при работе иная, чем в указанном варианте. Формула изобретения 1.Манипулятор, содержащий шарнирно соединенные между собой звенья, имеющие стыковочные элементы, и кинематическую цепь привода изменения относительного положения звеньев, отличающийся тем, что, с целью повьш1ения маневренности и расширения зоны обслуживания, кинематическая цепь привода выполнена в виде разветвленной на две параллельные ветви- зубчатой передачи, включающей в себя блоки из цилиндрических и конических зубчатых колес, смонтированные на звеньях промежуточные цилиндрические колеса, входящие в зацепление с цилиндрическими колесами блоков, и конические зубчатые колеса, жестко связанные каждое с соответствующим звеном и входящие в зацепление с коническим зубчатым колесом соответствующего блока, при этом оси блоков совпадают с осями шарнирного соединения звеньев между .собой. 2.Манипулятор по п. 1, отличающийся тем, что в кинематической цепи привода между смежными зубчатыми блоками имеется нечетное число промежуточных цилиндрических зубчатых колес, 3. Манипулятор по п. 1, отличающийся тем, что в кинематической цепи привода между смежными зубчатыми блоками имеется четное число промежуточных цилиндрических зубчатых колес.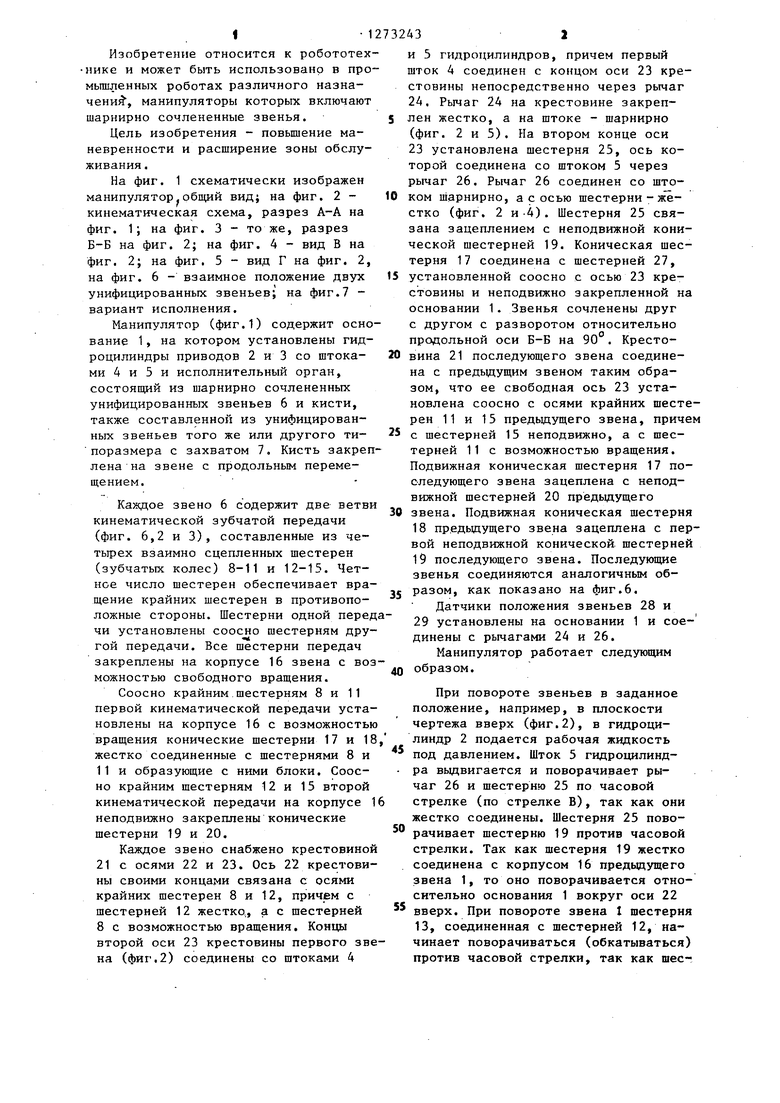

| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1986 |
|
SU1351782A1 |
| Манипулятор | 1990 |
|
SU1722807A1 |
| Манипулятор | 1983 |
|
SU1151453A1 |
| Механизм уравновешивания промышленного робота | 1987 |
|
SU1445947A1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| Мезанизм шарнира манипулятора | 1979 |
|
SU848356A2 |
| Механизм шарнира руки манипулятора | 1984 |
|
SU1214411A2 |
| Механизм шарнира руки манипуля-TOPA | 1979 |
|
SU848355A2 |
| Схват манипулятора | 1980 |
|
SU994252A1 |
| Манипулятор | 1978 |
|
SU763080A2 |

Изобретение относится к робототехнике и может быть использовано в промьшшенных роботах различного назначения, манипуляторы которых включают ша рнирно сочлененные звенья. Манипулятор содержит приводы 2 и 3 и дополнительный орган, которьй включает в себя звено 6,состоящее из двух соосных кинематических передач в виде ряда сцепленных шестерен 8,9,10 и 11. Оси шестерен закреплены на корпусе 16 звена с возможностью свободного вращения, соосно крайним шестерням на корпусе звена установлены с возможностью вращения конические шестерни 17 и 18, С осями крайних шестерен передач связана одна из осей крестовины 21. Каждая кинематическая передача выполнена в виде ряда четного или нечетного числа взаимосцепленных шестерен. 2 з.п. ф-лы, 7 ил.
Jf JLlAJ (i
Виде
5
фиг. 4
ffi/дГ 22 12 13 lit 15 a fff э 10 11 Инифицированное з8ено1 20 22 9 Ю 2t IS ЯнифицироЛанное звено ff
| Патент США № 4353677, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
