25
11283083
Изобретение относится к машиностроению и может быть использовано при создании роботов и манипуляторов с цикловым управлением.
Целью изобретения является упро- 5 щенйе конструкции и повышение надежности привода перемещения звеньев.
На фиг. 1 представлена схема предлагаемого привода в одном из возможных вариантов его реализации} на О фиг. 2 - циклограмма его работы.
Привод содержит гидроцилиндры 1 и 2, установленные на корпусе 3, на штоках которых ус,тановлены диски 4 и 5 с прикрепленными к ним пружина- ми 6 и 7 растяжения. Другим концом пружины закреплены на корпусе 3. Для передачи движения от гидроцилиндров к исполнительному механизму на выходном валу 8 установлен блок 9, на 20 котором закреплен трос 10, концы ко- торого закреплены на штоках гидроцилиндров. Раб очие полости гидроцилиндров соединены с золотниковым злек- трогидравлическим трехпозиционным четырехлинейным распределителем 11, котзорый осуществляет управление потоками масла. Обмотки золотникового распределителя через контакты Р11 и Р12 реле Р1 и Р2 подключаются к источнику питания. Система управления привода состоит из мультивибраторов 12 и 13, логических элементов И 14 и 15, логических элементов ИЛИ 16 и 17, двух реле Р1 и Р2 и двух 35
датчиков положения К,, К . .
Входы реле Р1 и Р2 соединены с выходами логических элементов ИЛИ 16 и 17, первые входы которых соеди- 40 нены с выходами логических элементов И 14 и 15, а вторые входы соединены с прямыми выходами мультиви- „ браторов. Инверсный выход мультиви- , братора 12 соединен с вторым входом 45 логического элемента И 15, а инверсный выход мультивибратора 13 соединен с вторым входом логического «элемента И 14. Первые входы логических элементов И 14 и 15 соединены че- 50 рез резисторы R1 и R2 с источником питанияJ а также с контактами датчиков положения К1, К2. Входы мультивибраторов 12 и 13 соединены с выходами А и В задающего программного 55 устройства.
Устройство работает следующим образ ом.
30
5
0 5
40 45 50 55
0
Предположим, что гидроцилиндр 1 находитсй в крайнем правом положении, тогда гидроцилиндр 2 находится в крайнем левом положении, пружины 6 находятся в сжатом состоянии, а пружины 7 - в растянутом. Исполнительный механизм находится в положении I, датчик положения К1 находится в замкнутом положении, а датчик К2 - в разомкнутом. Это состояние обеспечивается тем, что сигналы А и В отсутствуют. Тогда на первый вход логического элемента И 14 поступает сигнал логического нуля с датчика К1. На второй вход логического элемента И 14 с инверсного выхода мультивибратора 13 поступает сигнал логической единицы. С выхода логического элемента И 14 сигнал логической единицы поступает на первый вход логического элемента ИЛИ 16, на второй вход которого поступает с прямого выхода мультивибратора 12 сигнал логического нуля. Тогда с в гхода логического элемента ИЛИ 16 на вход реле Р1 поступает сигнал логической единицы. Реле Р 1 включено, контакт Р11 замкнут. Напряжение питания поступает на первый и второй входы золотникового распределителя 11. Давление масла удерживается в щтоковой полости гидроцилиндра 1. Датчик К2 выключен. Сигнал логической единицы с резистора R2 поступает на первый вход логического элемента -И 15, на второй вход которого поступает сигнал логической единицы с инверсного выхода мультивибратора 12. С выхода логического элемента И 15 сигнал логического нуля поступает на первьй вход логического элемента ИЛИ 17, на второй вход которого с прямого выхода мультивибратора 13 поступает сигнал логического нуля. С выхода логического элемента ИЛИ 17 на реле Р2 по- ступает сигнал логического нуля. Реле Р2 выключено. Контакты Р12 разомкнуты.
Предположим, что требуется переместить исполнительный механизм из положения I в положение II. Из задающего программного устройства на систему управления поступает сигнал А. На прямом вызлоде мультивибратора 13 появляется положительный импульс и сигнал логической единицы поступает на второй -вход логического элемента ИЛИ 17. С выхода логического элемен-
312
та ИЛИ 17 сигнал логической единицы поступает на вход реле Р2, Реле Р2 включено и контакты Р12 замкнуты.
Напряжение питания поступает на третий и четвертый входы золотникового распределителя 11. В этот же момент времени сигнал логического нуля с инверсного выхода мультивибратора 13 поступает на второй вход логического элемента И 14. С выхода логического элемента И 14 сигнал логического нуля поступает на первый вход логического элемента ИЛИ 16, с выхода которого сигнал, логического нуля поступает на вход реле Р1. Контакты Р11 размыкаются и напряжение питания перестает поступать на второй и первый входы золотникового распределителя 11. Шток золотникового распределителя перемещается, соединяя штоковую полость гидрогилин дра 1 со сливом, а штоковую полость гидроцилиндра 2-е нагнетанием, и выходное звено под действием пружин 7 и нагрузки, действующей на поршень гидроцилиндра 2, начинает перемещаться из положе ния I в положение II.
Через промежуток времени t, , кото- рый выбирается из условия движения привода по инерции и подхода к положению II с нулевой скоростью, сигналы с выходов мультивибратора 13 снимаются, так как при перемещении исполнительного механизма из положения I в положение II контакты датчиков К1 .и К2 разомкнуты. Сигнал логической единицы с резистора R1 поступает на вход логического элемента И 14 на второй вход которого поступает сигнал логической единицы с инверсного выхода мультивибратора 13. С выхода логического элемента И 14 сигнал логического нуля поступает на первый вход логического элемента ИЛИ 16, на второй вход которого с прямог выхода мультивибратора 12 поступает сигнал логического нуля. С выхода логического элемента ИЛИ 16 сигнал лог гического нуля поступает на вход реле Р1. Реле Р1 выключено, контакты Р11 остаются разомкнутыми. На второй вход логического элемента ИЛИ 17 с прямого выхода мультивибратора 13 поступает сигнал логического нуля. На первый вход логического элемента И 15 с резистора R2 поступает сигнал логической единицы, а на второй вход логического элемента И 15 с инверс
ного выхода мультивибратора 12 поступает сигнал логической единицы, и с выхода логического элемента И 15 сигнал логического нуля поступает на первый В.ХОД логического элемента ИЛИ 17. Сигнал логического нуля с вы- хода логического элемента ИЛИ 17 поступает на вход реле Р24 Реле Р2 выключено. Контакты Р12 разомкнуты. Золотниковый распределитель 11 выключен.
При достижении исполнительным механизмом положения II датчик К2 замыкается и сигнал логического нуля i пост Упает на первый вход логического элемента ИЛИ 17. Сигнал логической единицы с выхода логического элемента ИЛИ 17 поступает на вход реле Р2, контакты Р12 замыкаются, и напрялсение питания поступает на третий и четвертьш входы золотникового распределителя 11.
При дви кении исполнительного механизма из положения II в положение I из задающего программного устройства поступает сигнал В на вход мультивибратора 12. Б этом случае исполнительный механизм осуществляет движение из положения II в положение I аналогичным образом.
Использование изобретения позволит упростить механическую часть привода звеньев за счет совмещения в гидродвигателе функций тормозного устройства и компенсации диссипации энергии, что позволяет увеличить надежность и долговечность конструкции.
,-. 30 45
40 Фор мула изобретения
Привод перемещения звеньев, содержащий аккумулятор механической энергии и двигатель, отличающийся тем, что, с целью упрощения конструкции и повышения надежности, его система управления снабжена двумя датчиками положения, двумя реле, двумя логическими элементами ИЛИ, двумя логическими элементами И и двумя мультивибраторами, входы каждого реле соединены последовательно через логические элементы ИЛИ и И с датчиками положения, прямые выходы мультивибраторов соединены с вторыми входами логических элементов ИЛИ соответственно первого и второго реле, а инверсные выходы мультивибраторов соединены с вторыми входами
51283083
логических элементов И соответственно второго и первого реле, причем двигатель выполнен гидравлическим с управляющим электрогидравлическим трехпозиционным четьфехлинейным распв т
пределителем, соединяющим между собой в нейтральном положении полости гидродвигателя, а контакты обоих реле включены в цепь питания обмоток электрогидравлического распределителя.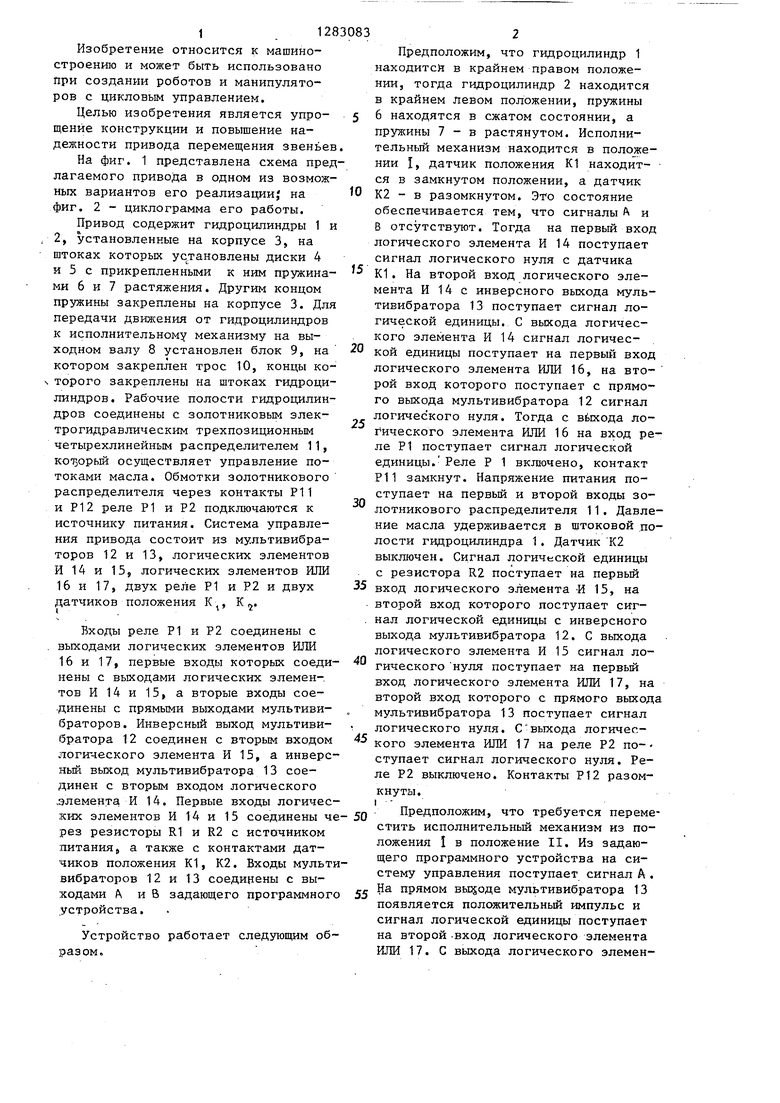
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ диагностики технического состояния газотурбинного двигателя | 2023 |
|
RU2813716C1 |
| Устройство к однопериодному перфоратору для запоминания набираемых чисел | 1958 |
|
SU119733A1 |
| Устройство для переноса трубных заготовок и его система управления | 1982 |
|
SU1103925A1 |
| Установка для отбора пробы при бурении | 1978 |
|
SU827769A1 |
| МНОГОРАЗРЯДНЫЙ ДЕСЯТИЧНЫЙ СЧЕТЧИК ИМПУЛЬСОВ | 1973 |
|
SU408463A1 |
| ПРИБОР ДЛЯ РЕГИСТРАЦИИ РЕЗУЛЬТАТОВ ПОКОМПОНЕНТНОГО АНАЛИЗАВСЕСОЮЗНАЯ[МТЕ111НО-ТЕХКН4ЕГНДЯI БИБЛИОТЕКА | 1970 |
|
SU286337A1 |
| Цифровое устройство для управления машиной непрерывного литья заготовок | 1989 |
|
SU1632621A1 |
| Устройство для моделирования графов Петри | 1990 |
|
SU1817103A1 |
| Устройство отключения вакуума | 1984 |
|
SU1271462A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТУРНИКЕТОМ | 1970 |
|
SU264832A1 |

Изобретение относится к области машиностроения, в частности к приводам роботов и манипуляторов с цикловым программным управлением. Целью изобретения является упрощение конструкции и повьшение надежности уст- ройства. Система управления привода снабжена двумя реле, двумя логическими элементами ИЛИ, двумя логическими элементами И и двумя мультивибраторами, причем вход каждого реле соединен последовательно через логические элементы ИЛИ и И с датчиками положения, а выходы устройства програмного управления соединены с двумя мультивибраторами, прямые выходы которых соединены с вторыми входами логических элементов ИЛИ соответственно первого и второго реле, а инверсные выходы мультивибраторов соединены с вторыми входами логических элементов И соответственно второго и первого реле. Длительность привода выполнен гидравлическим с управляющим электрогидравлическим трехпозиционным четырехлинейным распределителем, соединяющим между собой в нейтральном положении полости гидродвигателя, а контакты реле включены в цепь питания катушек электрогидравлического распределителя. 2 ил. i (П С Is 00 со о 00 со
10 - пвд8 л5 5 //
J.
и
-fZf.
ijipad
P-1 Pe/ie замнм{/то замннут P O Реле pQso/iffwmff /f ff .A fTJWf paso/iH i//
| Манипулятор с программным управлением | 1978 |
|
SU733975A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| ,.(§4) ПРИВОД | |||
| ПЕРЕМЕЩЕНИЯ ЗВЕНЬЕВ | |||
