электродов 3 и 4 и полого упругого элемента, заполненного электрореоло™ гической жидкостью, В основании 1 и платформе 2 вьтолнены отверстия. Гибкие тяги 6 и 7 привода проходят через отверстия основания 1 и закреплены концами в отверстиях платформы
1
Изобретение относится к робототехнике и предназначено для использования в роботах с большой степенью подвижности.
Цель изобретения - расширение технологических возможностей за счет увеличения углов поворота подвижной платформы относительно основания.
На фиг, 1 изображен модуль манипулятора, общий, вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - вид Б на фиг. 1; на фиг, 4 - схема сборки манипулятора из модулей.
Модуль манипулятора содержит основание 1 (фиг. 1), подвижную платформу 2, электроды 3 и 4, выполненные в виде спиральных упругодеформируемых элементов с плоскими витками и эквидистантным друг относительно друга расположенршм витков электродов, полый упругий элемент для электрореологической жидкости, размещенный в межэлектродном пространстве.
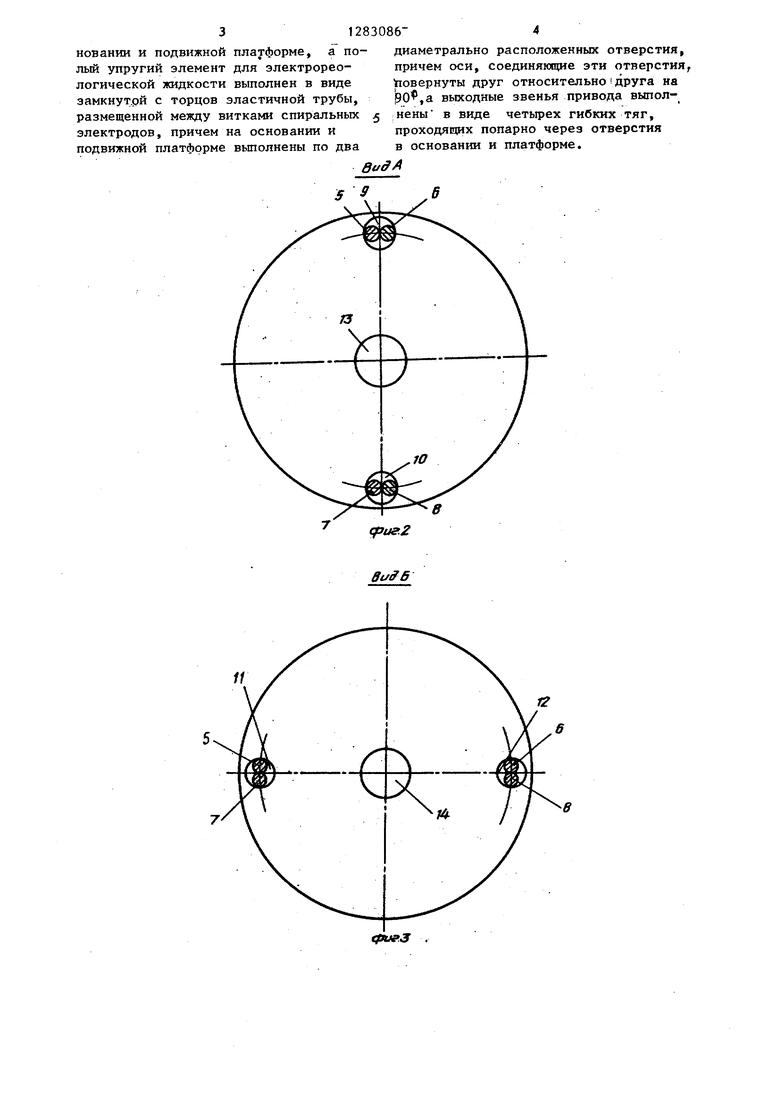
Выходные звенья привода вьтолнены в виде тяги 5-8 (фиг. 2), закрепленных попарно в отверстиях 9 и 10 на противоположных сторонах подвижной платформы 2 и проходящих сквсззь отверстия 11 и 12 (фиг. 3) основания 1, причем оси, соединяющие отверстия в основании 1 и платформе 2, повернуты друг относительно друга на 90 Кроме того, в основании 1 и подвижной платформе 2 вьтолнены центральные отверстия 13 и 14 (фиг. 2 и 3) для подвода электропитания к электродам.
Модуль работает следующим образом Йри необходимости совершить поворот подвижной платформы 2 относительно основания 1 в плоскости, па- ,раллельной плоскости основания, сообщают усилия попарно тягам 6 и 7 или 5 и 8.
,а
2. Натяжением тяг 6 и 7 обеспечивается поворот платформы 2 относительно основания 1. Фиксация модуля манипулятора осуществляется подачей напряжения на электроды 3 и 4, после чего электрореологическая жидкость загтьшает. А ил.
5
0
При необходимости непараллельного поворота плоскости подвижной платформы 2 относительно плоскости основания 1 сообщают усилия любой паре тяг: 5и6, 5и7, 6и8, 8и7.
При необходимости изменить :рас- стояние между основанием 1 и подвижной платформой 2 сообщают усилие одновременно тягам 5-8.
При необходимости зафиксировать модуль манипулятора (например, для осуществления работы соседних модулей при помощи тех же тяг) в любом из положений поворота или в исходном положении подают напряжения на электроды 3 и 4. Электрореологическая жидкость, застывая, теряет способность перетекать внутри элемента 5, лишая, таким образом, соседние витки электродов 3 и 4 относительной подвижности, и фиксирует модуль манипулятора.
Форм у-л а изобретения
Модуль манипулятора, содержащий основание и подвижную платформу, соединенные между собой спиральным упругодеформируемым элементом, электроды, полые упругие элементы, заполненные электрореологической жидкостью и связанные с основанием и платформой, и привод платформы, о тл и ч а ю щ и и с я тем, что, с целью расширения технологических возможностей за счет увеличения углов поворота подвижной платформы относительно основания, электроды вьшолйены в виде спиральных з ругодефор- мируемых элементов с плоскими витками, эквидистантно расположенными друг относительно друга, концы кото- рык закреплены соответственно на ос31283
новании и подвижной платформе, а полый упругий элемент для электрореологической жидкости выполнен в виде замкнут.рй с торцов эластичной трубы, размещенной между витками спиральных электродов, причем на основании и подвижной платформе вьшолнены по два
диаметрально расположенных отверстия, причем оси, соединяющие эти отверстия, повернуты друг относительно друга на Р0,а выходные звенья привода выполнены в виде четьфех гибких тяг, проходящих попарно через отверстия в основании и платформе.
фигЗ .
дуис .
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль манипулятора | 1983 |
|
SU1104016A1 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ ШАГА ВИНТОВОЙ ПЕРЕДАЧИ И СПОСОБ РЕГУЛИРОВАНИЯ ШАГА ВИНТОВОЙ ПЕРЕДАЧИ | 1991 |
|
RU2029184C1 |
| Устройство для внутритрубной роботизированной механической очистки поверхности трубопроводов | 2024 |
|
RU2837919C1 |
| Задающее устройство копирующего манипулятора | 1987 |
|
SU1437209A1 |
| Рука манипулятора | 1989 |
|
SU1673438A1 |
| Экзоскелет для дистанционного управления в копирующем режиме антропоморфным роботом | 2021 |
|
RU2832192C2 |
| ПЛАНЕТАРНЫЙ ЦИКЛОИДАЛЬНЫЙ РЕДУКТОР | 1999 |
|
RU2153613C1 |
| Рука манипулятора | 1985 |
|
SU1321576A1 |
| КОМБИНИРОВАННЫЙ МАНИПУЛЯТОР РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2721485C1 |
| ЗАХВАТ МАНИПУЛЯТОРА, МАНИПУЛЯТОР И РОБОТ ДЛЯ НАСТОЛЬНЫХ ИГР | 2008 |
|
RU2393081C2 |

Изобретение относится к области станкостроения и предназначено для использования в роботах. Цель изобретения - расширение технологических возможностей за счет увеличения углов поворота подвижной платформы робота относительно основания. Основание 1 связано с подвижной платформой 2 с помощью упругодеформируемых СО bo 
Редактор И. Рыбченко
Составитель 10. Вильчинский
Техред Л.Сердюкова Корректор М. Максимишинец
Заказ 7344/14Тираж 949Подписное
ВИИЖШ Государственного комитета СССР . по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие,г.Ужгород,ул.Проектная,4
| Модуль манипулятора | 1983 |
|
SU1104016A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
