7« Г
f/fo 17 /«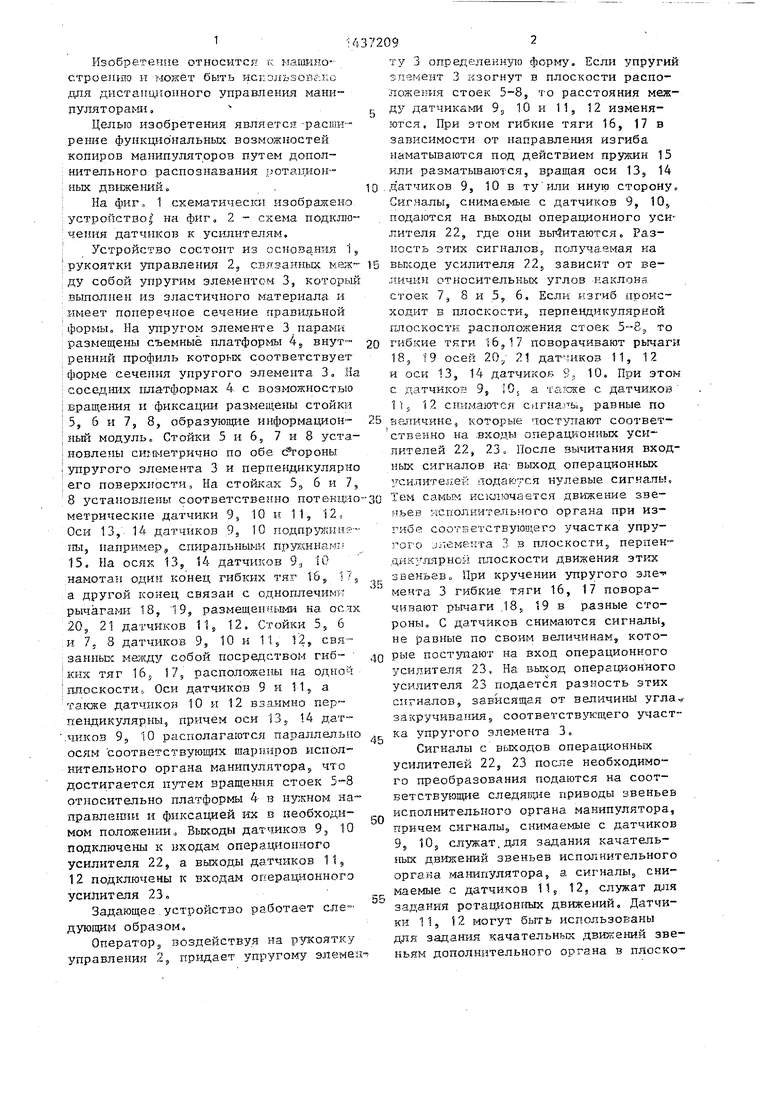
| название | год | авторы | номер документа |
|---|---|---|---|
| Задающее устройство копирующего манипулятора | 1986 |
|
SU1333566A1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| УСТРОЙСТВО ДЛЯ МОНТАЖА КОНТАКТНОЙ СЕТИ ЭЛЕКТРИФИЦИРОВАННЫХ ЖЕЛЕЗНЫХ ДОРОГ | 2001 |
|
RU2223184C2 |
| Устройство для разгрузки звена руки робота | 1990 |
|
SU1779580A1 |
| Задающий орган манипулятора | 1986 |
|
SU1393619A1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| КОМБИНИРОВАННЫЙ МАНИПУЛЯТОР РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2721485C1 |
| БАЗОВЫЙ МОДУЛЬ МАНИПУЛЯТОРНОЙ МАШИНЫ | 2012 |
|
RU2522496C2 |
| УСТРОЙСТВО АВТОМАТИЗАЦИИ ИСПЫТАНИЙ ДВИЖИТЕЛЕЙ АВТОНОМНЫХ ОБЪЕКТОВ | 2020 |
|
RU2739905C1 |
| Способ управления механизмами параллельной кинематической структуры с учетом технического состояния исполнительных приводов и устройство для его реализации | 2023 |
|
RU2812830C1 |
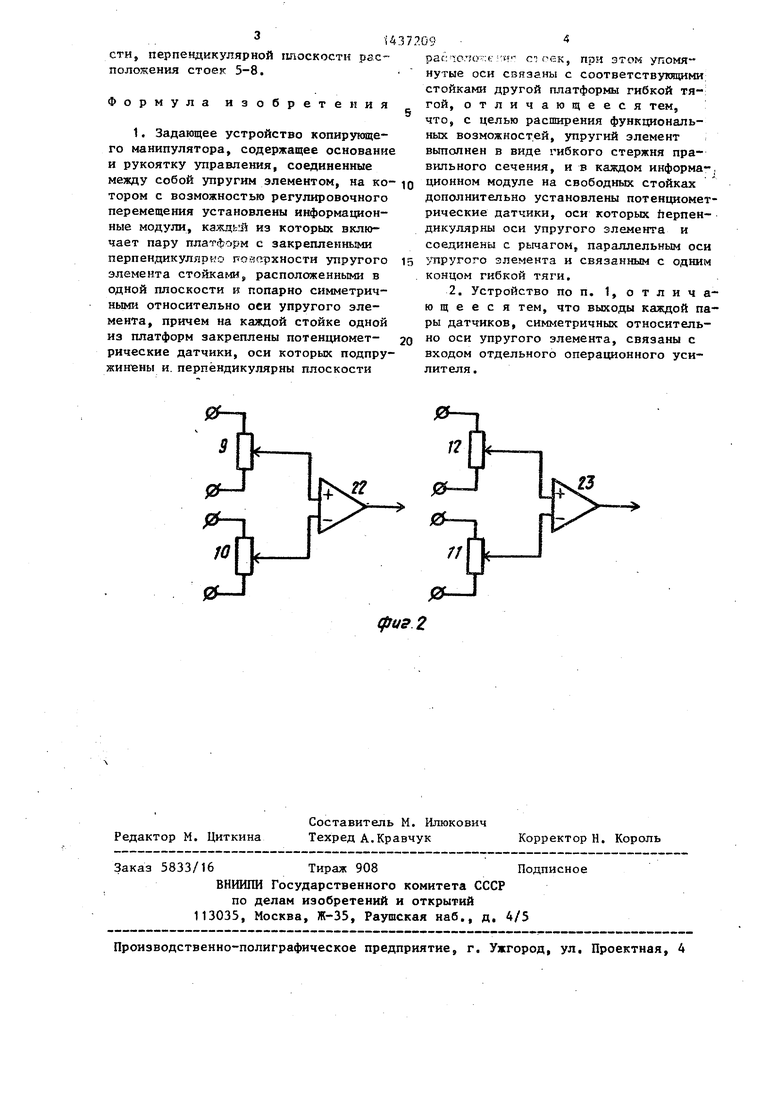
Изобретение относится к области машиностроения и может быть использовано для дистанционного управления манипуляторами. Целью изобретения является распшрение функциональных возможностей копиров манипуляторов путем дополнительного распознавания ротационных движений. Устройство содержит основание 1, рукоятку управления 2, связанные упругим зле- ментом 3 с сечением правильной формы, на котором с помощью пары платформ 4 крепятся стойки 5-8, образующие информационный модуль. На стойках 5-8 установлены потенциометрические датчики 9-12, попарно связанные гибкими тягами 16,17. Оси 13,14, 20,21 датчиков 9-12 подпружинены, а на осях 20,21 закреплены рычаги 18,19. Выходы датчиков 9,10 связаны с входом одного операционного усилителя, а выходы датчиков 11,12 - с входом другого .усилителя. Оператор, воздействуя на рукоятку, придает элементу 3 определенный изгиб, что фиксируется датчиками 9,10, или кручение, что фиксируется датчиками 11,12. Полученные сигналы через операционные усилители передаются в систему управления копирующего манипулятора. 1 з.п, ф-лы, 2 ил. с $ (Л
Р //
V W
//
(pt/e.l
1
Изобретеяне относится к магокно- строеишо и ножет быть испэльзовг-лю доя дистапщюиного управления мани- цуляторам5ь
Целью изобретения является -расширение функциональных возможностей кониров манипуляторов путем дополнительного распознавания ротацион- : ных двнже1шй„
; На фиг а 1 схематически изображено :устройство на фиг, 2 - схема подклю- : четшя датчиков к уситштелям.
; Устройство состоит ИЗ ОСНОВаШМ 1j
: рукоятки зшравления 2, связанных меж- КУ собой упругим элементом 3, который вьтолнен из эластичного материала и имеет поперечное сечение правиз ьной формы. На упругом элементе 3 парами размещены съемные платформы 4s внутренний профиль которых соответствует форме упругого элемента 3 На :соседних гшатформах 4 с возможностью I вращения и фиксации размещены стойки ;5, б и 7, 8, образующие информацион- jный модуль. Стойки 5 и б, 7 и 8 уста- 1 новлепы сшметрично по обе с гороны j упругого элемента 3 и перпендикулярно его поверхности. На стойках 5, б и 7,
о установлены соответственно потенидо метрические датчики 9, 10 и 11, 2„ Оси 13, 14 датчиков 9, Ю подгЕру :;ние- iibij например, спиральными пружинал-с 15. На осях 13, 14 датчиков 9,, 10 намотан один конец гибких тях 165 а другой конец связан с одноплечими рычагами 18, 195 размещенными на осях
5, 6 12, свя
э 21 датчиков 1 j 12, Стойки ,
В датчиков 9, 10 и 1.
20
и 7
: занньк мелсду собой посредством гиб- ; ких тяг 165, 17, расположены на одной плоскости Оси датчиков 9 и 11j а
также датчиков 10 и 12 взаимно пер™
певдикулярны, причем оси IB,, 14 дат
лшков 9, 10 располагаются параллельно осям соответствующих шари/иров исполнительного органа манипулятора., что достигается путем вращения стоек 5-8 относительно платформы 4 в нужном на правлеш11 и фиксацией ii:x в необходи
мом положении. Выходы датчиков 9, 10 подключены к входам операционного усилителя 22, а выходы датчиков llj 12 подключены к входам операционного усилителя 23 о
Задающее . устройство работает еле- дующим образом.
Оператор3 воздействуя на рукоятку управления 2 придает упругоглу элемен
372092
ту 3 опреде:леннз 1о форму. Если упругий зпемент 3 изогнут в плоскости расположения стоек 5-8, то расстояния меж- g ду дaтчикa и 9, 10 и 11, 12 изменяются. При этом гибкие тяги 16, 17 в зависимости от направления изгиба наматываются под действием пружин 15 или разматываются, вращая оси 3, 14 10 .датчиков 9, 10 в ту или иную сторону
Сигналы, снимаемые с датчиков 9, 10 . подаются на выходы операционного усилителя 22, где они вычитаются. Разность этих сигналов „ пол; аемая на 15 вькоде усилителя 22, зависит от величии относительных углов каклонз. стоек 7, 8 и 5, 6, Если изгиб происходит в плоскости, перпендикулярной
плоскости расположения стоек З-В, то гибкие ткги ,6,17 поворачивают рычаги IBj осей 20; 21 датчиков 11, 12 и оси 13, 14 датчиков 9, 10. При этом с датчиков 9, 10, а также с датчихов 1 1S (2 снимаются с-лгпалы равные по величине, которые чоступают соответ- ственно на входы операцк:ониь х усилителей 22 23 а После вычитания входных сигналов на- выход операционных усилителей подаются нулевые сигналы. Тем самым кс5О1Ючается движение звеньев исполнительного органа при изгибе соответствуюп его участка упругого .элемента
в плоскости, перпен
дикулярной плоскости движения этих звеньев а При кручении упругого элемента 3 гибкие тяги 16, 17 поворачивают рьиаги .18 5 19 в разные стороны, С датчиков снимаются сигналы, не равные по СБОИМ величинам, которые поступают на вход операционного усилитепя 23., На выход операционного усилителя 23 подается разность этих сигналов, зависящая от величины угла закручивания, соответств тсщего участка упругого элемента 3
Сигналы с выходов операционных
усилителей 22, 23 после необходимого преобразования подаются на соответствующие следящие приводы звеньев исполнительного органа манипулятора, причем сигналы, снимаемые с датчиков 9, lOj служат.для задания качатель- ных двШкений звеньев исполнительного органа ма шпулятора, а сигналы, снимаемые с датчиков 11s 2, служат для
задания ротащ- он1шх движений. Датчики 1 1, 12 могут быть использованы для задания качательных движений звеньям дополнительного органа в плоскости, перпендикулярной плоскости расположения стоек 5-8.
Формула изобретения
между собой упругим элементом, на ко- IQ ционном модуле на свободных стойках тором с возможностью регулировочного перемещения установлены информационные модули, каждь й из которых включает пару платформ с закрепленными перпендикулярно поверхности упругого is элемента стойкагда, расположенньми в одной плоскости и попарно симметричными относительно оси упругого элемента, причем на каждой стойке одной из платформ закреплены потенциомет- 20 рические датчики, оси которых подпру- жин1ены и. перпендикулярны плоскости
дополнительно установлены потенциоме рические датчики, оси которых перпен дикулярны оси упругого элемента и соединены с рычагом, параллельным ос упругого элемента и связанным с одни концом гибкой тяги,
рас тсло- -л-: «1- С ) рек, при этом упомянутые оси связаны с соответствукндими стойками другой платформы гибкой тя-- гой, отличающееся тем, что, с целью расширения функциональных возможностей, упругий элемент вьтопнен в виде гибкого стержня правильного сечения, и в каждом информационном модуле на свободных стойках
дополнительно установлены потенциомет- рические датчики, оси которых перпендикулярны оси упругого элемента и соединены с рычагом, параллельным оси упругого элемента и связанным с одним концом гибкой тяги,
фиг 2
| Задающее устройство копирующего манипулятора | 1986 |
|
SU1333566A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
