113
Изобретение от юсится к робото- технике и предназначено для использования в конструкциях роботов с большой степенью подвижности.
Цель изобретения - улучшение динамических характеристик за счет кине- мат1-гческой развязки шарниров.
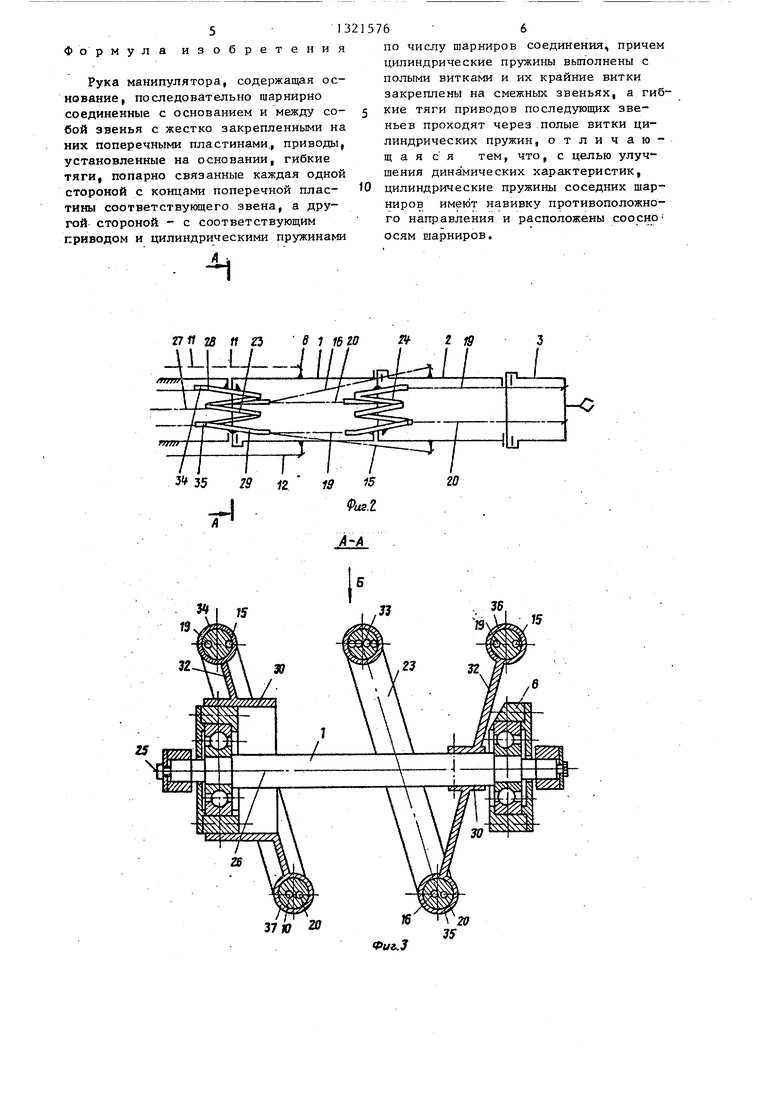
На фигв 1 изображена кинематическая схема руки манипулятора; на фиг,2 то же, вид сверху; на фиг,3 - сечение А-А на фиг.2; на фиг.4 - вид Б на фиг.З.
Рука манипулятора содержит подвижные звенья 3f соединенные между собой шарнирами 4 и 5, Звено I соединено с неподвижным основанием б через шарнир 7, Каждое подвижно.е звено имеет поперечную пластину, жестко связанную со звеном. Звено 1 имеет поперечную пластину 8, звенья 2 и 3 - соответственно поперечные пластига, 9 и 10, Приводы каждого подвижного звена расположены на неподвижном основании (не показано). Движение с приводов на звенья передается через гибкие тяги, например тросики„ При этом один конец каждой тяги закреплен на выходном элементе . приводаа а другой - на приводимом в движение звене.
Каждое звено приводится в движени от двух гибких тяг, обеспечивающих прямое и обратное движения, Звено 1 приводится в движение гибкими тягами J1 и 12J перекинутыми через направляющие блоки 13 и 14 соответственно. Концы гибких тяг 11 и 12 закреплены неподвижно на противоположных краях поперечной пластиш г 8 Звено 2 приводится в движение гибкими тягами 15 и 16,, перекинутыми через направляющие блоки-17 и 18 соответственно. Концы гибких тяг 15 и 16 закреплены на противоположных краях поперечной пластины 9 в Звено 3 приводится в движение через гибкие тяги 19 и 20, переки}1у- тые через направляющие блоки 21 и 22 соответственно.
Все направляющие блоки 13, 14,. 17 18, 21 и 22 установлены на неподвижном основании 6 с возможностью вращения. Шарниры 7 и 4 снабжены цютиндри- ческими пружинами 23 и 24 соответственно, витки которых выполнены полыми. Продольные оси пружин соосны осям вращения шарниров,, Продольная ось 25 цилиндрической пружины 23 соос на оси вращения 26 шарнира 7 и пер
62
пендикулярна продольной оси 27 звена 1„ Крайние витки 28 и 29 цилиндрической пружины 23 неподвижно закреплены на основании 6 и звене I соответственно. Крепление витков 28 и 29 к основанию 6 и звену 1 обеспечивается через клеммовые соединения 30 и резьбовое соедине ше 31, Клеммы соединены с витками через пластину 32,
жестко связанную с клеммой и витком, например, Сваркой, Цилиндрическая пружина 24 установлена аналогично цилиндрической пружине 23,
Внутри полости пружины, гибкие тяги отделены одна от другой и от стенок витков наполнителем 38, который обеспечивает малый коэффициент трения- при движении гибких тяг относительно витков пружины,
Каждая пружина имеет по два входных и выходных отверстия, цилиндрическая пр гжина 23 имеет входные 34 и 35 и выходные 36 и 37 отверстия. При этом отверстия 34 и 35 расположены на расстоянии, равном 1,5 шага витка пружины или кратном 1,5 шага. На ан шогичном удалении друг от друга расположены выходные отверстия 36 и 37, Продольные оси выходного 36 и
входного 34 отверстий лежат в одной плоскости. Оси отверстия 35 и 37 расположены также в одной плоскости. Отверстия 34 и 37 расположены на неподвижном витке 28, отверстия 35 и
36 - на витке 29, неподвижном относительно звена 1.
Направление витков цилиндрических пружин 23 и 24 соседних шарниров выполнено противоположным. Пружина 23
имеет левое направление витков, пружина 24 - правое.
Взаимное расположение входных и выходных отверстий пружины 24 идентично взаимному расположению аналогичных отверстий пружины 23, Гибкие тяги 15 и 19 огибают направляющие блоки сосзтветственно 17 и 21, после чего направлены параштельно друг другу к входному отверстию 34 пружины 23, По
полости витков пружины 23 гибкие тяги проходят на равном удалении одна от другой и от стенок витков пружины до выходного отверстия 36, Гибкая тяга 19 после из пружины 23 направлена к входному отверстию пружины 24, аналогичному входному отверстию 34 пружины 23, По полости витков пружины 24 гибкая тяга 19 пропущена до
выходного отверстия аналогично выходному отверстию 36 пружины 23, От стенок витков 24 гибкая тяга 19 отделена наполнителем 33, После выхода из пружины 24 гибкая тяга 19 направлена к краю пластины 10 звена 3,
Гибкая тяга 15 после выхода из отверстия 36 пружины 23 направлена к краю пластины 9, Гибкие тяги 16 и 20
расположены на руке манипулятора ана- О исходит вокруг оси 25 пружины, соосной оси 26 шарнира 7, Вследствие то25
логично гибким тягам 15 и 19, Через направляющие блоки, соответственно 18 и.22 гибкие тяги направлены к входному отверстию 35 пружины 23, Выход гибких тяг из пружины 23 обеспечи- 5 вается через отверстия 37, Гибкая тяга 1 6 после этого направлена к краю пластины 9, противоположному тому, к которому прикреплена гибкая тяга 15, Гибкая тяга.20 после выхода из 20 отверстия 37 .направлена к входному отверстию пружины 24, аналогичному входному отверстию 35 пружины 23. После выхода из пружины 24 через отверстие, аналогичное отверстию 37 пружины 23, гибкая тяга 20 направлена к краю пластины 10,
Для фиксации положения выходного ,звена -привода относительно неподвижного основания 6 установлен ;тормоз 30 (не показан),
Рука манипулятора работает следующим образом.
Для обеспечения поворота звена 1 35 относительно неподвижного основания
6 против хода часовой стрелки включают привод гибкой тяги 11, сообщая ей движение. При этом одновременно гибкая тяга 12 свободно, без натяже- 40 ния,.отпускается за счет работы привода. Вращение выходного элемента привода при этом такое, что обеспечивает удлинение гибкой тяги 12 (привод гибкой тяги 12 может работать в 45 режиме генератора при отпущенном тормозе выходного элемента). Под действием движущейся в направлении к приводу гибкой тяги 11, конец которой закреплен на поперечной пластине 8, звено 1 поворачивается в шарнире 7 против часовой стрелки до достижения заданного угла поворота, после чего привод гибкой тяги 11 выключается. При этом выходное звено привода, на -5
котором закреплен конец гибкой тяги 11f фиксируется тормозом относительно неподвижного основания 6, При по50
го, что .вращение витка 29 происходит против направления часовой стрелки и совпадает с направлением витков пружины 23, диаметр последней увеличивается.
При увеличении диаметра пружины 23 расстояние между входными отверстиями 34 и 35 и выходными отверстиями 36 и 37, замеренное по поверхности витков, остается неизменным. Поэтому длины тяг, проходящих внутри полых внтков пружины, остаются неизменными.
Для поворота звена 2 относительно звена 1 включают привод гибкой тяги 16, при этом гибкая тяга 15 свободно перепускается. Под действием движущейся гибкой тяги 16 один конец которой закреплен на поперечной пластине 9, звено поворачивается в шарнире 4 по часовой стрелке. При этом диаметр цилиндрической пружины 24 уменьшается, но неизменной остается длина между входными и вькодными отверстиями, замеренная по поверхности витков. Благодаря этому положение звена 3 относительно звена 2 при повороте последнего неизменно. Движение тяги 16 по внутренней полости витков пру жины 23 не изменяет ее положение и конфинурацию, так как силы трения скольжения незначительны благодаря наполнителю 33 и, кроме того, силы трения направлены вдоль витков пружины, имеющей в этом направлении повышенную жесткость.
Поворот звена 3 относительно зве- на 2 по часовой стрелке обеспечивается включением гибкой тяги 19, один конец которой закреплен на поперечной пластине 10. Привод гибкой тяги 20 при этом также включают в направлении, обеспечивающем свободное, ненатянутое, положение гибкой тяги 20, Гибкие тяги 19 и 20 при этом движутся относительно пружин 23 и 24 (фиг. 2), не изменяя их положение и форму.
15764
вороте звена 1 приводы гибких .тяг 15, 16 и 19, 20 включены,
Поворот звена 1 сопровождается увеличением диаметра ципиндрической 5 пружины 23, так как виток 29 вращается вместе со звеном 1 относительно неподвижного основания 6 и жестко с ним связанным витком 28, Вращение витка 29 относительно витка 28 про5
5 0
0
5
0 5 -5
0
го, что .вращение витка 29 происходит против направления часовой стрелки и совпадает с направлением витков пружины 23, диаметр последней увеличивается.
При увеличении диаметра пружины 23 расстояние между входными отверстиями 34 и 35 и выходными отверстиями 36 и 37, замеренное по поверхности витков, остается неизменным. Поэтому длины тяг, проходящих внутри полых внтков пружины, остаются неизменными.
Для поворота звена 2 относительно звена 1 включают привод гибкой тяги 16, при этом гибкая тяга 15 свободно перепускается. Под действием движущейся гибкой тяги 16 один конец которой закреплен на поперечной пластине 9, звено поворачивается в шарнире 4 по часовой стрелке. При этом диаметр цилиндрической пружины 24 уменьшается, но неизменной остается длина между входными и вькодными отверстиями, замеренная по поверхности витков. Благодаря этому положение звена 3 относительно звена 2 при повороте последнего неизменно. Движение тяги 16 по внутренней полости витков пру жины 23 не изменяет ее положение и конфинурацию, так как силы трения скольжения незначительны благодаря наполнителю 33 и, кроме того, силы трения направлены вдоль витков пружины, имеющей в этом направлении повышенную жесткость.
Поворот звена 3 относительно зве- на 2 по часовой стрелке обеспечивается включением гибкой тяги 19, один конец которой закреплен на поперечной пластине 10. Привод гибкой тяги 20 при этом также включают в направлении, обеспечивающем свободное, ненатянутое, положение гибкой тяги 20, Гибкие тяги 19 и 20 при этом движутся относительно пружин 23 и 24 (фиг. 2), не изменяя их положение и форму.
ормул а
5
изо
1321576
бретения
по ци по за ки нь ли щ ше ци ни го ос
Рука манипулятора, содержащая основание, последовательно шарнирно соединенные с основанием и между собой звенья с жестко закрепленными на них поперечными пластинами., приводы, установленные на основании, гибкие тяги, попарно связанные каждая одной стороной с концами поперечной пластины соответствунщего звена, а другой стороной - с соответствующим приводом и цилиндрическими пружинами
по числу шарниров соединения, причем цилиндрические пружины выполнены с полыми витками и их крайние витки закреплены на смежных звеньях, а гибкие тяги приводов последующих звеньев проходят через полые витки цилиндрических пружин, отличающая с я тем, что, с целью улуч шения динамических характеристик, цилиндрические пружины соседних шарниров имеют навивку противоположного направления и расположены соосно осям шарниров.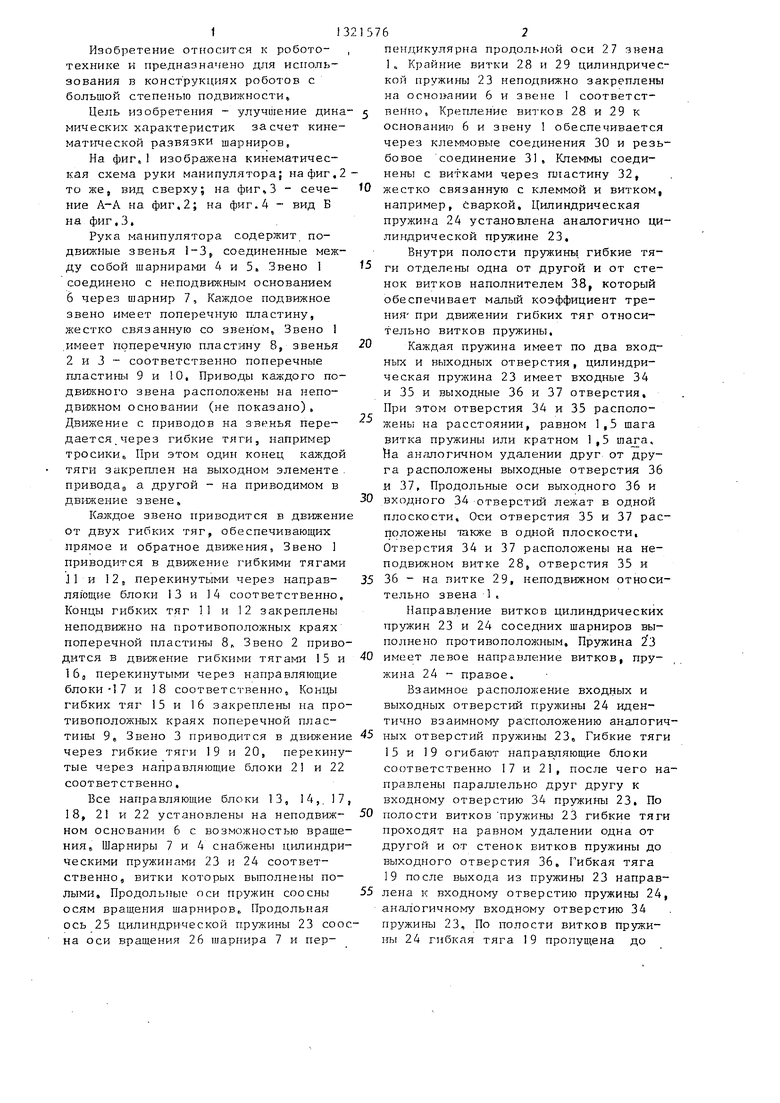

| название | год | авторы | номер документа |
|---|---|---|---|
| Рука манипулятора | 1985 |
|
SU1263520A1 |
| Рука манипулятора | 1986 |
|
SU1333564A1 |
| Рука манипулятора | 1984 |
|
SU1248792A1 |
| Исполнительный орган манипулятора | 1986 |
|
SU1323364A1 |
| Манипулятор | 1986 |
|
SU1404324A1 |
| РОБОТ, ВЫПОЛНЕННЫЙ С ИСПОЛЬЗОВАНИЕМ ПРИНЦИПА ПАРАЛЛЕЛОГРАММА | 2016 |
|
RU2663510C2 |
| КОМБИНИРОВАННЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ЛЕГЧЕ ВОЗДУХА (ВАРИАНТЫ) | 2006 |
|
RU2318697C2 |
| Манипулятор | 1986 |
|
SU1351782A1 |
| Манипулятор | 1983 |
|
SU1115898A1 |
| Рука манипулятора | 1985 |
|
SU1291382A1 |

Изобретение относится к области робототехники. Цель изобретения - улучшение динамических характеристик. Рука манипулятора содержит ряд соединенных между собой шарнирами 4, 5 и 7 звеньев 1, 2 и 3, -их приводы установлены на неподвижном основании, гибкие тяги для передачи движения с приводов на звенья и цилиндрические пружины 23 и 24 по числу шарниров соединения, при этом цилиндрические пружины выполнены с полыми витками. Цилиндрические пружины 23 и 24 имеют навивку противоположного направления и расположены соосно осям вращения шарниров. 4 ил. J9 15 / / .11 2} .П f3 зг б 36 37 8 /5 9 / 4 / / // I , 12 (Л 20 10 Фи2.1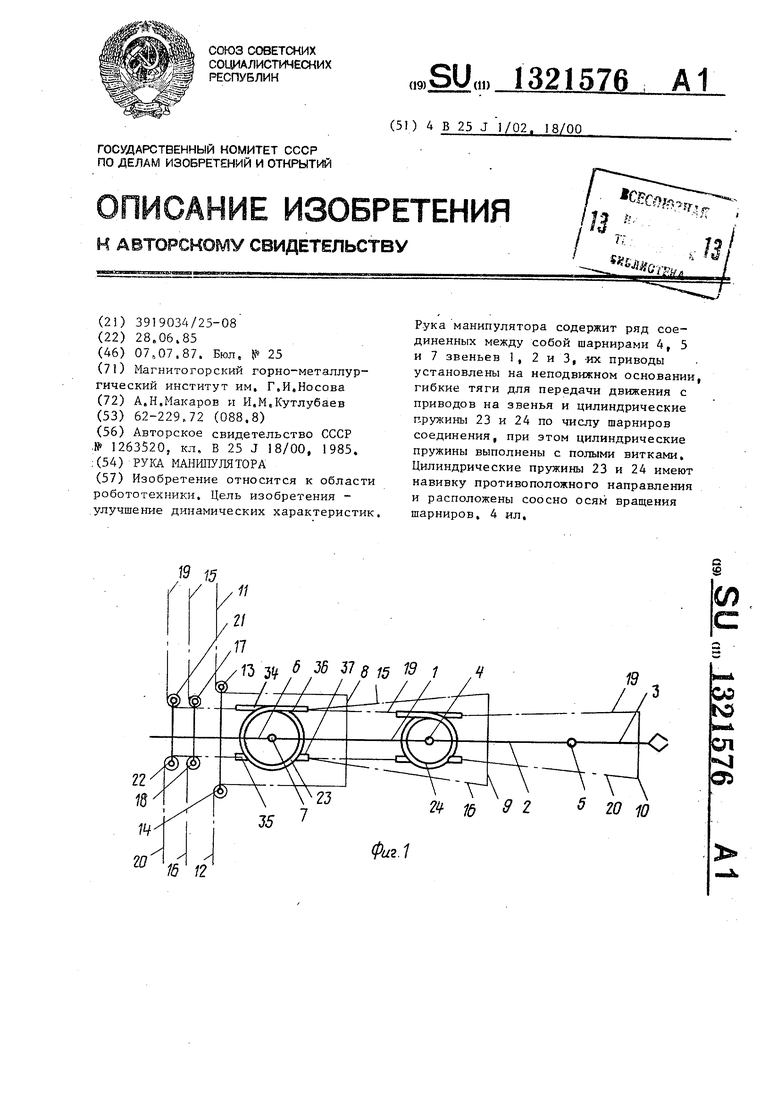
27Л м /Г Я в 1 №го г г igз
. -/
Vt
19
37X7 20
15
20
| Авторское свидетельство СССР ,№ 1263520, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
