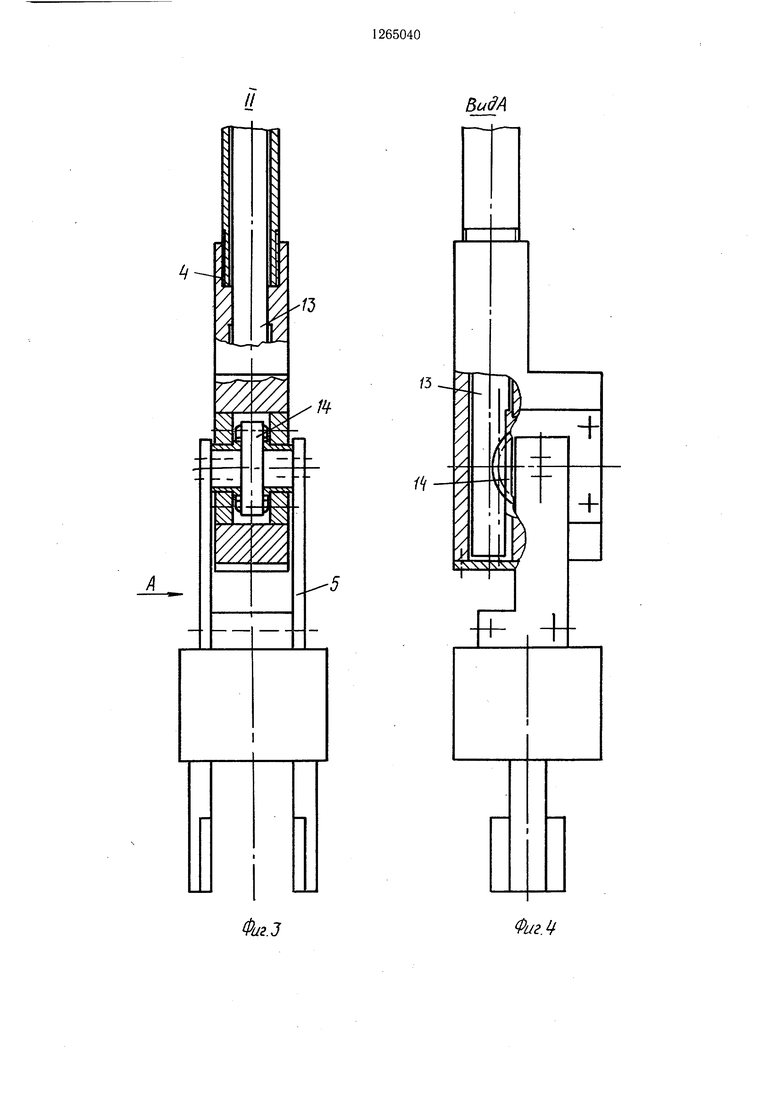
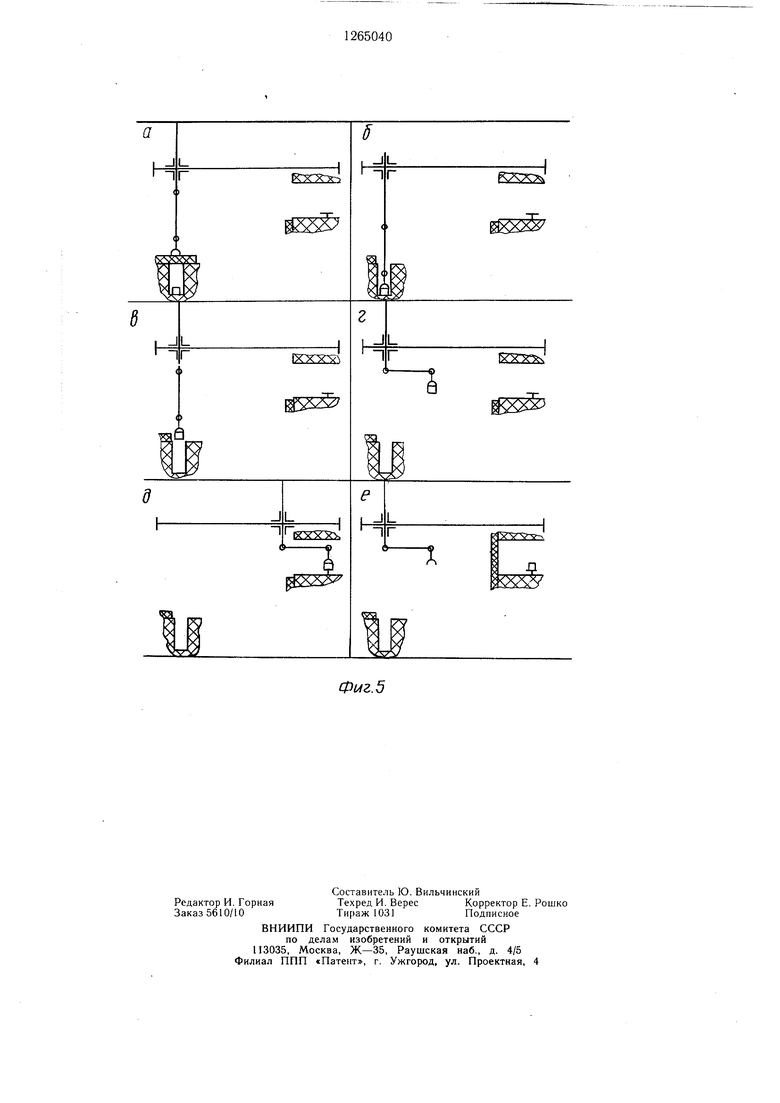
Изобретение относится к машиностроению, в частности к манипуляторам, применяемым для механизации вредных технологических процессов. Цель изобретения - повышение надежности и улучшение динамики работы за счет уменьшения количества приводов. На фиг. 1 показан манипулятор, общий вид; на фиг. 2 - узел I на фиг. 1; на фиг. 3 - узел II на фиг. 1; на фиг. 4 - вид А на фиг. 3; на фиг. 5 - фазы последовательности работы манипулятора. Манипулятор состоит из портала 1 с на: правляющей, каретки 2, смонтированной на - направляющей, механической руки, состоя: щей из последовательно соединеннь1х посред:ством шарнира звеньев 3 и 4 и кисти 5 с ; захватом, установленной на каретке 2 с возможностью перемещения последней, выдвижения и поворота звеньев механической руки, кисти и захвата. Шарнир, соединяющий звенья 3 и 4 механической руки, выполнен в виде двух зубчато-реечных передач и планетарного механизма, который состоит из корпуса 6, жестко связанного с звеном 3, в полости которого закреплено центральное зубчатое колесо 7 с внутренним зубом и смонтирован соосно этому колесу вал 8. На внешней консоли этого вала закреплено зубчатое колесо 9, находящееся в зацеплении с рейкой 10, .4 „ „„„,,„ Q п r,.,,,f,ji,fT,4расположенной в звене 3 с возможностью перемещения вдоль его оси. На другом конце вала 8 закреплено водило 11, жестко свяанное с звеном 4 механической руки. В водиле 11 размещен сателлит 12, выполненный в виде блока двух зубчатых колес, одно из которых находится в зацеплении с центральным зубчатым колесом 7, а второе - с рейкой 13, размещенной в звене 4. Эта рейка кинематически связана с зубчатым колесом 14, жестко связанным с кистью 5 механической руки. Манипулятор работает следующим обПри перемещении рейки 10 зубчатое колесо 9, находящееся в зацеплении с ней, поворачивается на угол, определяемый величиной этого перемещения. На этот же угол поворачивается водило 11 и связанное с ним звено 4 механической руки. При повороте водила 11 начинает вращаться сателлит 12, так как одно из его сблокированных зубчатых колес откатывается по центральному зубчатому колесу 7, и второе зубчатое колесо сателлита перемещает рейку 13, ко.торая, взаимодействуя с зубчатым колесом 14, поворачивает кисть 5 с захватом. Данная кинематика позволяет реализовать движения механической руки, фазы коoaiu «ип/и ии. 1..-/..... ,.,- fj-, -, торых показаны на фиг. 5, где а - исходное положение; б - перемещение захвата вниз и захват предмета; в - перемещение захвата с предметом вверх; г - двойной излом оси манипулятора; д - перемещение манипулятора по порталу вправо и отпуск предмета; е - перемещение манипулятора по в,1(1тя- р - ПРПРМР1Т1РНИР мянипулятооа по порталу влево.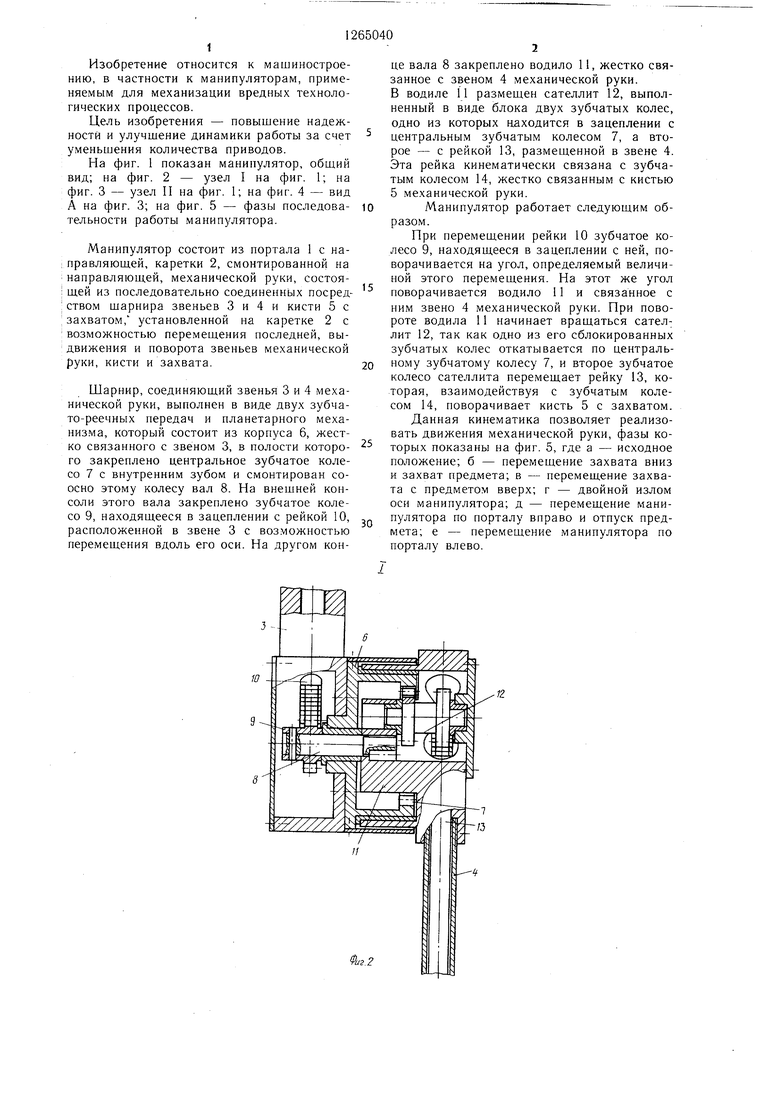
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1985 |
|
SU1284821A1 |
| Манипулятор модульного типа | 1990 |
|
SU1775289A1 |
| Манипулятор | 1983 |
|
SU1154085A1 |
| Манипулятор | 1989 |
|
SU1685701A1 |
| Манипулятор | 1989 |
|
SU1743850A1 |
| Промышленный робот | 1978 |
|
SU719865A1 |
| Транспортный манипулятор | 1988 |
|
SU1611729A1 |
| Автоматический манипулятор | 1980 |
|
SU944918A1 |
| Манипулятор | 1989 |
|
SU1646843A1 |
| Устройство для захвата и подачи плоских изделий | 1986 |
|
SU1375548A1 |
МАНИПУЛЯТОР, содержащий портал с направляющей, каретку, смонтированную на направляющей, механическую руку с кистью и захватом, состоящую из ряда последовательно соединенных посредством щарниров звеньев, и установленную на каретке с возможностью перемещения относительно нее, механизм передачи движения от предыдущего звена к последующему и приводы перемещения каретки, выдвижения и поворота звеньев механической руки, кисти и захвата, отличающийся тем,, что, с целью повышения надежности и улучшения динамики работы за счет уменьшения количества приводов, механизм передачи движения от предыдущего звена к последующему выполнен в виде двух зубчато-реечных передач и планетарного механизма, содержащего корпус, закрепленный на предыдущем звене, в полости которого установлено центральное зубчатое колесо с внутренними зубьями, вал, смонтированный в корпусе соосно с зубчатым колесом, на одном конце которого закреплено зубчатое колесо первой зубчатореечной передачи, и на другом - водило, жестко связанное с последующим звеном, и сателлит, выполненный в виде блока двух зубчатых колес, одно из которых находится в зацеплении с центральным зубчатым колесом, а второе - с рейкой второй зубчато реечной передачи, причем рейка первой зубчато-реечной передачи размещена в преды(Л дущем звене с возможностью перемещения вдоль его оси, а рейка второй зубчато-реечной передачи - в последующем звене и кинематически связана с кистью. 1C О5 сд о 4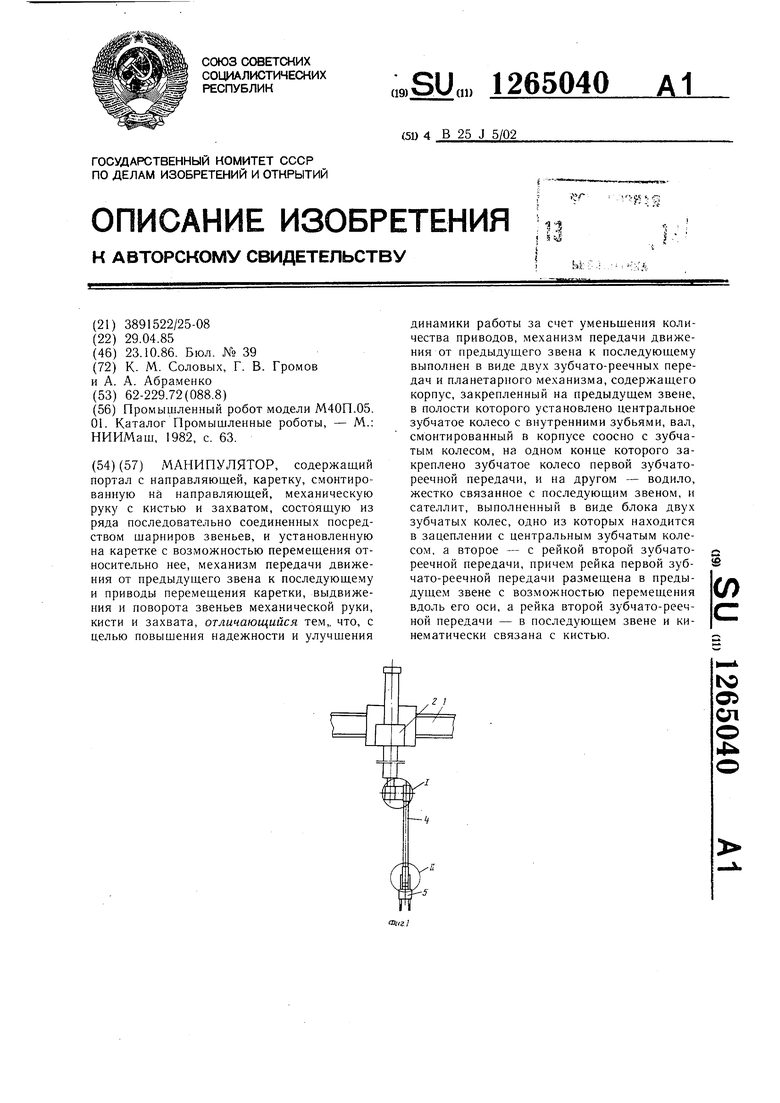
//
Фиг.З
Фиг.
И
L
RX-X:
ПГ I
| Приспособление с иглой для прочистки кухонь типа "Примус" | 1923 |
|
SU40A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Каталог Промышленные роботы, - М.: НИИМаш, 1982, с | |||
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
