1
(21)4770993/08 (22)01.11.89 (46)23.10.91. Бюл. №39
(71)Рижский политехнический институт им.А.Я.Пельше
(72)О.Б.Ефанов, В.В.Кушнир. Ю Н.Павлов, Я.К.Райнес и А.Я.Янсонс (53)621-229.7(088.8)
(56)Авторское свидетельство СССР № 1284821, кл. В 25 J 5/02. 1985.
(54) МАНИПУЛЯТОР
(57)Изобретение относится к мачиинострое- нию и может быть использовано в быстро- переналаживаемых автоматических линиях для загрузки-выгрузки оборудования.
Целью изобретения является повышение надежности. Перемещение каретки 2 несущей механической рукой 3 со схватом 17 происходит при перемещении троса 19 двигателем 4 за счет торможения зубчатого колеса 11. связанного через управляемую муфту 13с барабаном 8, постоянно действующим тормозом. Для перемещения схвата 17 в вертикальном направлении и его поворота каретка 2 фиксируется тормозом 7, при этом барабан 8, поворачиваясь при перемещении троса 19 через муфты 13 и 14, преодолевая усилие в колесе 11, через соответствующую передачу, обеспечивает перемещение схвата 17 относительно каретки 2. 1 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический манипулятор | 1989 |
|
SU1660951A1 |
| Манипулятор | 1985 |
|
SU1284821A1 |
| Механизм позиционирования исполнительного органа | 1983 |
|
SU1114548A2 |
| Манипулятор | 1985 |
|
SU1315294A1 |
| ДВУХКОМПОНЕНТНЫЙ ДИСТАНЦИОННЫЙ МАНИПУЛЯТОР | 2005 |
|
RU2363570C2 |
| Манипулятор | 1988 |
|
SU1590370A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Автоматический манипулятор | 1980 |
|
SU944918A1 |
| Перегрузочный манипулятор | 1985 |
|
SU1247257A1 |
| Промышленный робот | 1986 |
|
SU1509244A1 |
Изобретение относится к машиностроению и может быть использовано в быстро- переналаживаемых автоматических линиях для загрузки-разгрузки оборудования.
Целью изобретения является повышение надежности.
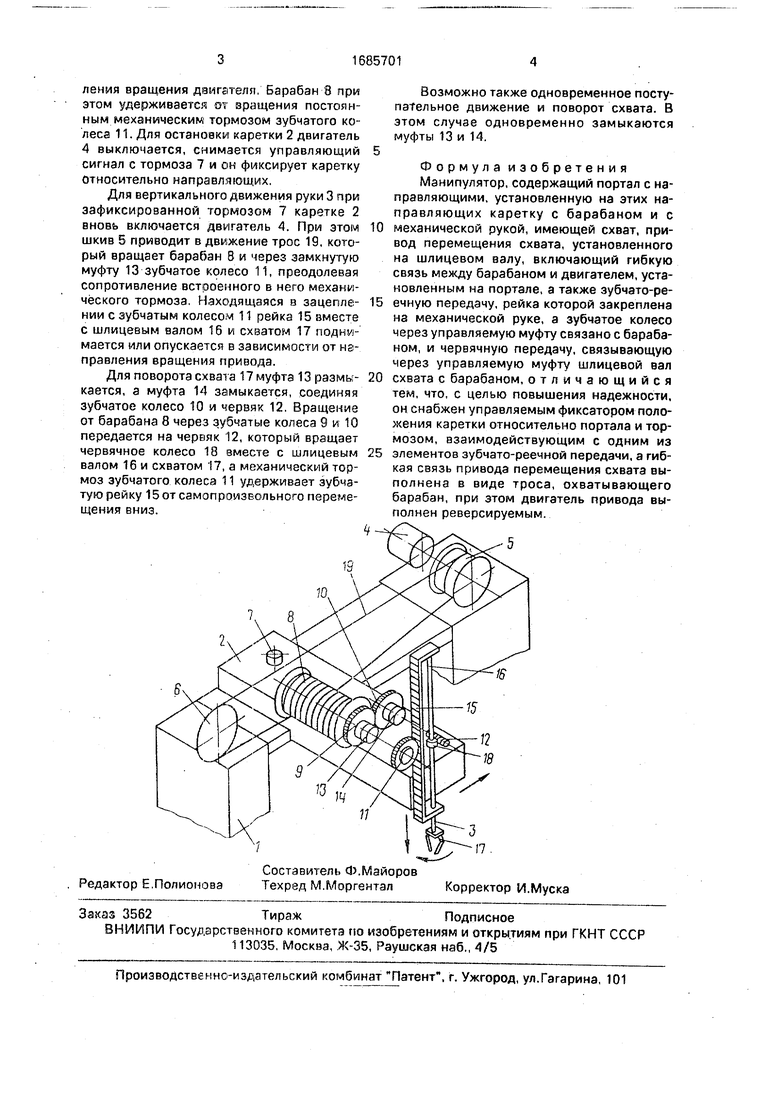
На чертеже изображен манипулятор, общий вид.
Манипулятор содержит портал 1, на направляющих которого смонтирована каретка 2 с механической рукой 3. На одном конце портала 1 установлен реверсируемый двигатель 4, связанный со шкивом 5, а на другом - блок 6. На корпусе каретки 2 смонтированы управляемый фиксатор ее положения. выполненный в виде управляемого тормоза 7, барабан 8 с закрепленным на нем зубчатым колесом 9, зубчатое колесо 10. зубчатое колесо 11 со встроенным постоянно действующим механическим тормозом и червяк 12. Барабан 8 соединяется с осью зубчатого колеса 11 через управляемую муфту 13, а
зубчатое колесо 10 соединяется с валом червяка 12 через управляемую муфту 14, На механической руке закреплена зубчатая рейка 15. образующая с зубчатым колесом 11 зубчато-реечную передачу, и установлен с возможностью поворота шлицевой вал 16. на конце которого закреплен схват 17. Кроме того, на валу 16с возможностью продольного перемещения установлено червячное колесо 18. взаимодействующее с червяком 12. Трос 19 намотан на барабан 8. охватывает шкив 5 и блок 6. Концы троса зафиксированы на барабане 8.
Манипулятор работает следующим образом.
Для перемещения каретки 2 упрасляю- щий сигнал подается на тормоз 7, который расфиксирует каретку 2 относительно направляющих портала 1. Включается двигатель 4 и шкив 5 приводит в движение трос 19, перемещая каретку 2 по направляющим вправо или влево в зависимости от направЁ
Os 00
ел
XI О
ления вращения двигателя. Барабан 8 при этом удерживается от вращения постоянным механическим тормозом зубчатого колеса 11. Для остановки каретки 2 двигатель 4 выключается, снимается управляющий сигнал с тормоза 7 и он фиксирует каретку относительно направляющих.
Для вертикального движения руки 3 при зафиксированной тормозом 7 каретке 2 вновь включается двигатель 4, При этом шкив 5 приводит в движение трос 19. который вращает барабан 8 и через замкнутую муфту 13 зубчатое колесо 11, преодолевая сопротивление встроенного в него механического тормоза. Находящаяся в зацепле- нии с зубчатым колесом 11 рейка 15 вместе с шлицевым валом 16 и схватом 17 поднимается или опускается в зависимости от направления вращения привода.
Для поворота схвата 17 муфта 13 размы- кается, а муфта 14 замыкается, соединяя зубчатое колесо 10 и червяк 12. Вращение от барабана 8 через зубчатые колеса 9 и 10 передается на червяк 12, который вращает червячное колесо 18 вместе с шлицевым валом 16 и схватом 17, а механический тормоз зубчатого колеса 11 удерживает зубчатую рейку 15 от самопроизвольного перемещения вниз.
Возможно также одновременное поступательное движение и поворот схвата. В этом случае одновременно замыкаются муфты 13 и 14.
Формула изобретения Манипулятор, содержащий портал с направляющими, установленную на этих направляющих каретку с барабаном и с механической рукой, имеющей схват, привод перемещения схвата, установленного на шлицевом валу, включающий гибкую связь между барабаном и двигателем, установленным на портале, а также зубчато-реечную передачу, рейка которой закреплена на механической руке, а зубчатое колесо через управляемую муфту связано с барабаном, и червячную передачу, связывающую через управляемую муфту шлицевой вал схвата с барабаном, отличающийся тем, что, с целью повышения надежности, он снабжен управляемым фиксатором положения каретки относительно портала и тормозом, взаимодействующим с одним из элементов зубчато-реечной передачи, а гибкая связь привода перемещения схвата выполнена в виде троса, охватывающего барабан, при этом двигатель привода выполнен реверсируемым.
5
17
