Изобретение относится к подъемно- транспортному оборудованию и может быть использовано во всех отраслях народного хозяйства, связанных с подъемом и кантованием грузов, преимущественно, с трудно- определимым положением центра тяжести, например секций корпусов судов.
Цель изобретения - повышение надежности в работе.
На фиг. 1 изображено грузозахватное устройство, общий вид; на фиг. 2 - вид А на фиг. 1 (поворотная рамка для крепления грузов); на фиг. 3 - сечение Б-Б на фиг. 2; на фиг. 4 - сечение В-В на фиг. 2; на фиг. 5 - сечение Г-Г на фиг. 2; на фиг. 6 - узел I на фиг. 1 (грузозахватный элемент для кантовки грузов типа обечаек); на фиг. 7 - цикл поворота груза на 180°.
Захват состоит из рамок 1 с цапфами 2 и гибкими тягами 3. В рамках 1 с возможностью перемещения вдоль направляющих 4 с помощью ходовых винтов 5 установлены ползуны 6. Ходовые винты 5 снабжены электроприводом 7. Каждая рамка 1 снабжена дополнительным винтом 8 с гайкой 9 и электроприводом 10. Дополнительные вин- ты 8 смонтированы перпендикулярно приводным винтам 5 в ползунах 6. Кроме того, гайки 9 установлены с возможностью перемещения вдоль ползуна 6. К гайкам 9 прикреплены цапфы 2. На рамках 1 для крепления груза с возможностью перестановки вдоль них установлены грузозахватные элементы II, имеющие различные варианты исполнения (фиг. 6).
Захват работает следующим образом.
На груз с.помощью грузозахватных эле- ментов устанавливаются рамки 1, на цап- фы 2 которых одеваются гибкие тяги 3. Цапфы 2 устанавливаются таким образом, чтобы центр тяжести груза был ниже их оси в одной с ней вертикальной плоскостью, Заведомо более нижнее расположение центра тяжести груза относительно оси цапф 2 достигается переводом ползунов 6 с помощью ходовых винтов 5 в самое верхнее положение на рамках 1. А расположение оси цапф 2 и центра тяжести груза в одной вертикальной плоскости достигается балансировкой груза в момент его отрыва от опорной поверхности путем перемещения гаек 9 с цапфами 2 по дополнительным винтам 8 электроприводом 10, причем само гру- зозахватное устройство, подвещенное за гибкие тяги 3, находится в подвещенном положении. Гайки 9 с цапфами 2 перемещают до положения пока груз не станет отрываться от опорной поверхности всеми точками одновременно. Если хода гаек 9 по допол- нительным винтам 8 не хватает, то груз на поворотных рамках смещают в сторону, обратную необходимому перемещению гаек 9,
и балансировку груза повторяют. После балансчровки груза (положение I, фиг. 7) его можно транспортировать на устройство в заданный район и кантовать.
Кантование груза производят следующим образом. Устройство с грузом за тяги 3 поднимают на высоту, необходимую для проведения кантования. Цри этом высота подъема определяется не габаритами устройства, а груза (положение IV, фиг. 7).
Включением электроприводов 10 в ту или иную сторону (в засимости от направления кантования груза) смещают гайки 9 относительно поворотных рамок 1, тем самым смещают груз с рамкой 1 в сторону и поворачивают его на некоторый угол относительно вертикали, так как центр тяжести стремится перейти под действием гравитационных сил в вертикальную плоскость, проходящую через ось цапф 2 (положение II, фиг. 7). После отключения электроприводов 10, включают электропривода 7 и перемещают поворотные рамки 1 с грузом вдоль приводных винтов 5 в сторону их поворота (положение HI, фиг. 7). При этом происходит кантование груза на 90° (положение IV, фиг. 7) и далее - неполное кантование груза на 180° (положение V, фиг. 7). После использования хода приводных ходовых винтов 5 электроприводы 7 отключают и, для заверщения кантования груза до 180° опять включают электроприводы 10, смещая при этом груз с поворотными рамками 1 в сторону их поворота до тех пор, пока груз не занимает горизонтальное положение (положение IV, фиг. 7).
При необходимости кантования груза на 360° весь приведенный цикл действий для кантования груза на 180° повторяется. Аналогичным образом, только в обратной последовательности, проводят кантование груза в противоположную сторону. После кантования груза его опускают и освобождают от него поворотные рамки 1. Возможно кантование груза при одновременной работе электроприводов 7 и 10.
. Формула изобретения
Захват-кантователь, содержащий соединяемые с грузоподъемной мащиной посредством гибких тяг рамки для крепления груза и приспособления для изменения положения точек подвеса, включающие в себя каждый закрепленный на соответствующей рамке ходовой винт и размещенный на нем ползун, отличающийся тем, что, с целью повыщения надежности в работе, каждое из приспособлений включает в себя дополнительный ходовой винт с гайкой, установленный на ползуне перпендикулярно первому ходовому винту, при этом гибкие тяги соединены с гайками дополнительных ходо- винтов.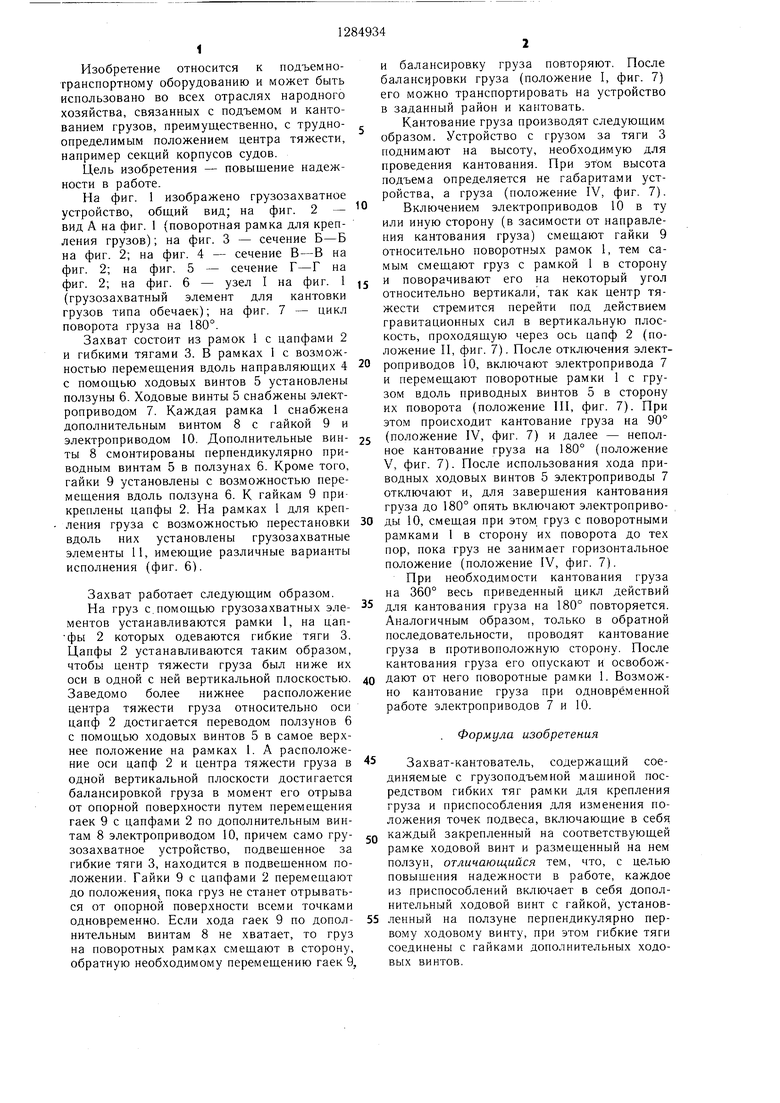
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватная траверса для кантования грузов | 1978 |
|
SU785172A2 |
| Захват-кантователь для цилиндрических грузов | 1981 |
|
SU1006357A1 |
| Захват-кантователь | 1987 |
|
SU1498693A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ПОДЪЕМА И ТРАНСПОРТИРОВАНИЯ ЦИЛИНДРИЧЕСКИХ ГРУЗОВ | 2015 |
|
RU2595204C1 |
| Захват-кантователь | 1985 |
|
SU1339081A1 |
| Грузозахватное устройство | 1989 |
|
SU1678747A1 |
| Траверса-кантователь | 1989 |
|
SU1756259A1 |
| Грузозахватная траверса для кантования грузов | 1973 |
|
SU552272A1 |
| Захват-кантователь для грузов цилиндрической формы | 1987 |
|
SU1504199A1 |
| Захват-кантователь | 1971 |
|
SU1141065A1 |


Изобретение относится к подъемно- транспортному оборудованию. Цель изобретения - повышение надежности в работе. Захват содержит рамки I для крепления груза, в каждой из которых установлен приводной ходовой винт 5 с установленным на нем ползуном 6, с размещенным на последнем дополнительным ходовым винтом 8 с гайкой 9, с которой с помощью цапф 2 соединены гибкие тяги 3 для присоединения захвата к крюку грузоподъемной мащины. Устройство работает следующим образом. На груз устанавливаются рамки I, при этом цапфы 2 размещаются так, чтобы центр тяжести груза был ниже их оси. При подъеме груза путем перемещения цапф 2 в плоскости рамки относительно центра тяжести груза происходит поворот его в вертикальной плоскости. 7 ил. вид А н s (Л d i iL г -5 N5 00 со оо 4
П Груз
Фиг.1
Б-Б
в-в
iLld
ФигI
Центр тяжести груза
VU2.7
Редактор И. Дербак Заказ 7492/24
Составитель О. Фотинич Техред И. ВересКорректор Т. Колб
Тираж 720Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Грузозахватная траверса для кантования грузов | 1978 |
|
SU785172A2 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
