1 П 15
СО
00
о:
CD
со
Фиг.1
10 8 14
Изобретение относится к подъемно- транспортному оборудованию, именно к грузозахватным устройствам.
Цель изобретения - улучшение эксплуатационных свойств путем исключения ручных операций при кантовании груза.
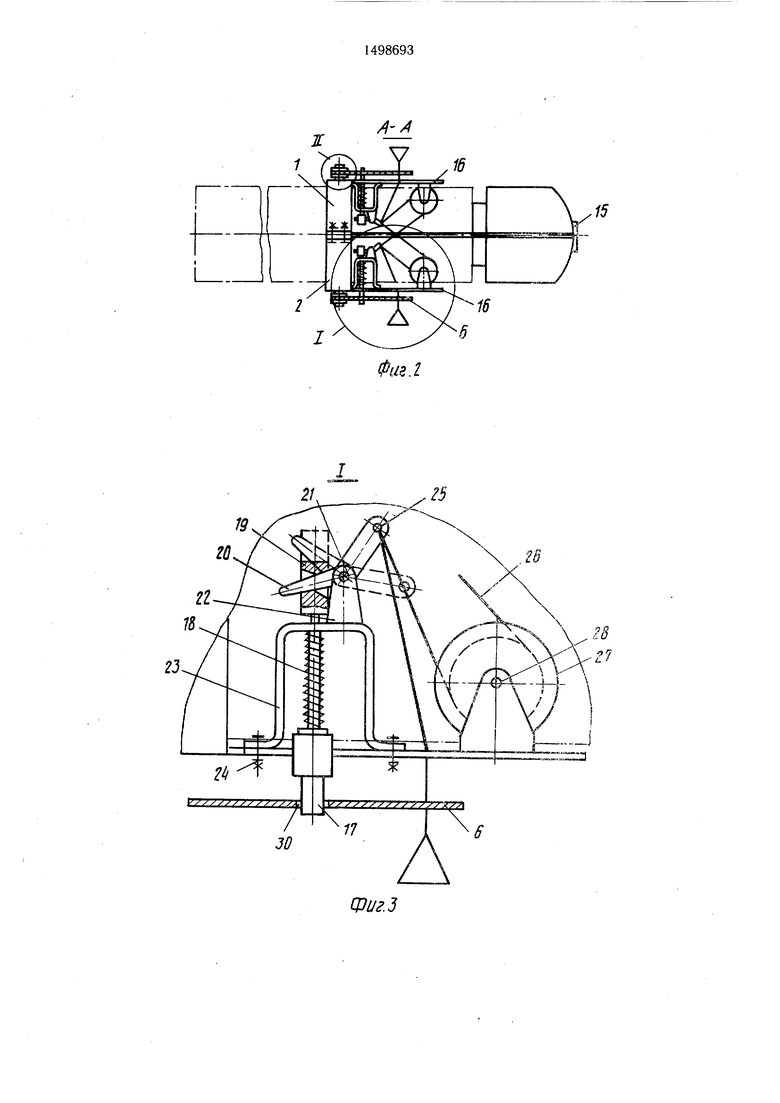
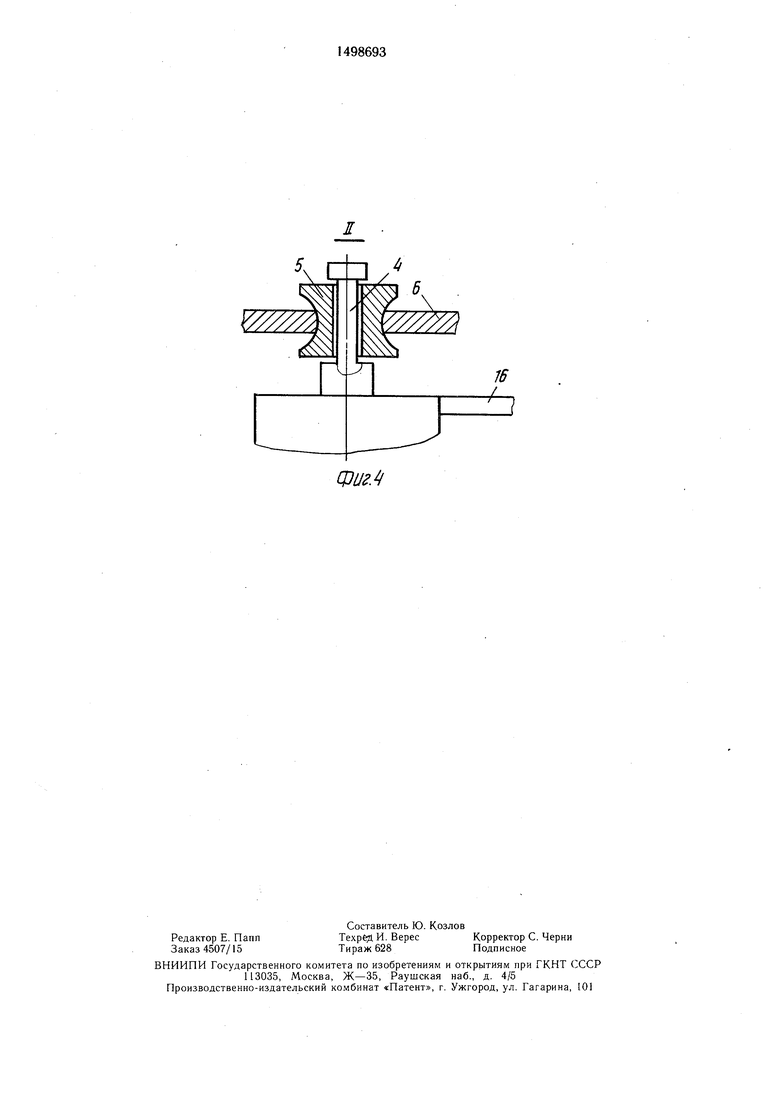
На фиг. 1 изображен захват-кантователь; общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - узел I на фиг. 2; на фиг. 4 узел II на фиг. 2.
Захват-кантователь содержит два полукольца 1 и 2, скрепляемых болтами 3. На каждом полукольце закреплена цапфа 4 с роликом 5, на котором установлена пластина 6, соединенная тросом 7 с, траверсой 8, которая подвешивается к грузоподъемному механизму (не показан). Устройство снабжено противовесом переменной массы, представляющим собой полый цилиндр 9, заполняемый жидким веществом или сыпучим материалом, с торцовыми стенками 10 и 11, в каждом из которых выполнено не менее одного отверстия 12 и 13 выше продольной оси цилиндра. Цилиндр 9 установлен в раме, состоящей из закрепленных на полукольцах 1 и 2 продольных планок 14 и прижимной планки 15. На полукольцах 1 и 2 жестко закреплены кронштейны 16, на каждом из которых установлены палец 17, подпружиненный пружиной 18, тяга 19, рычаг 20 на оси 21, установленной в проушинах 22, которые закреплены на скобе 23, прикрепленной болтами 24 к кронщтейну 16. Через отверстие 25 рычага 20 пропущен трос 26 дистанционного управления, огибающий обводной блок 27, закрепленный на кронштейне 16 посредством оси 28. В пластине 6 выполнены отверстия 29 и 30.
Захват-кантователь работает следующим образом.
Перед строповкой груза полукольца 1 и 2 разводят, надевают на горизонтально лежащий груз и скрепляют болтами 3. К толукольцам жестко крепят кронштейны 16 и подвижно посредством поворотных роликов 5 пластины 6. С помощью тяг 14 и прижимной планки 15 к торцу груза жестко крепят цилиндр 9. Определяют центр тяжести груза с противовесом (ЦТ4). Затем цилиндр 9 заполняют водой или любым сыпучим материалом, например песком, через отверстие 13, при этом общий центр тяжести (ЦТ1) смещается в сторону противовеса и располагается в плоскости, проходящей через центр т яжести груза {ЦТ2) и центр тяжести противовеса с водой или с сыпучим материалом (ЦТЗ). Груз стопорится в горизонтальной положении выдвигаемым с помощью пружины 18 пальцем 17,
который входит в отверстие 29. Пластину 6 крепят грузовым тросом 7 к траверсе 8, которую навещивают на крюк грузоподъемного механизма.
При выполнении операции кантования палец 17 выводят из отверстия 29 с помощью троса 26 управления рычага 20 и тяги 19. Пластина 6 освобождается и изделие кантуется. Палец 17 скользит по пластине 6, совмещается с отверстием 30 и груз стопорится в вертикальном положении, при
5 этом цилиндр 9 через отверстие 13 опорожняется. Отверстие 12 служит для сообщения с атмосферой. После слива жидкости центр тяжести перемещается в точку ЦТ4. При необходимости установить груз в горизонтальное положение -палец 17 выводят из отверстия 30, изделие кантуется без применения ручного труда и занимает горизонтальное положение. Палец 17 вводится пружиной 18 в отверстие 29.
5 Изобретение обеспечивает кантование грузов, в частности длинномерных, при минимальных затратах ручного труда и безопасность выполнения перегрузочных операций.
0
30
Формула изобретения
Захват-кантователь, содержащий траверсу и подвещенный к ней посредством грузового троса захватный орган, включающий в себя соединенные между собой
два полукольца с цапфами, на которых установлены ролики .для грузового троса, отличающийся тем, что, с целью улуч- щения эксплуатационных свойств путем исключения ручных операций при кантоваНИИ груза, он снабжен жестко закрепленной на полукольцах перпендикулярно их плоскости рамой с противовесом переменной массы, представляющим собой заполняемый жидкостью цилиндр с выполненными в его торцовых стенках выше проольной оси отверстиями, установленными на роликах и соединенными с грузовым тросом пластинами с отверстиями, жестко закрепленным на каждом полукольце кронштейном и установленным на нем подпружиненным пальцем, размещенным в отверстиях соответствующей пластины и соединенным с ним одним плечом приводным рычагом.
А 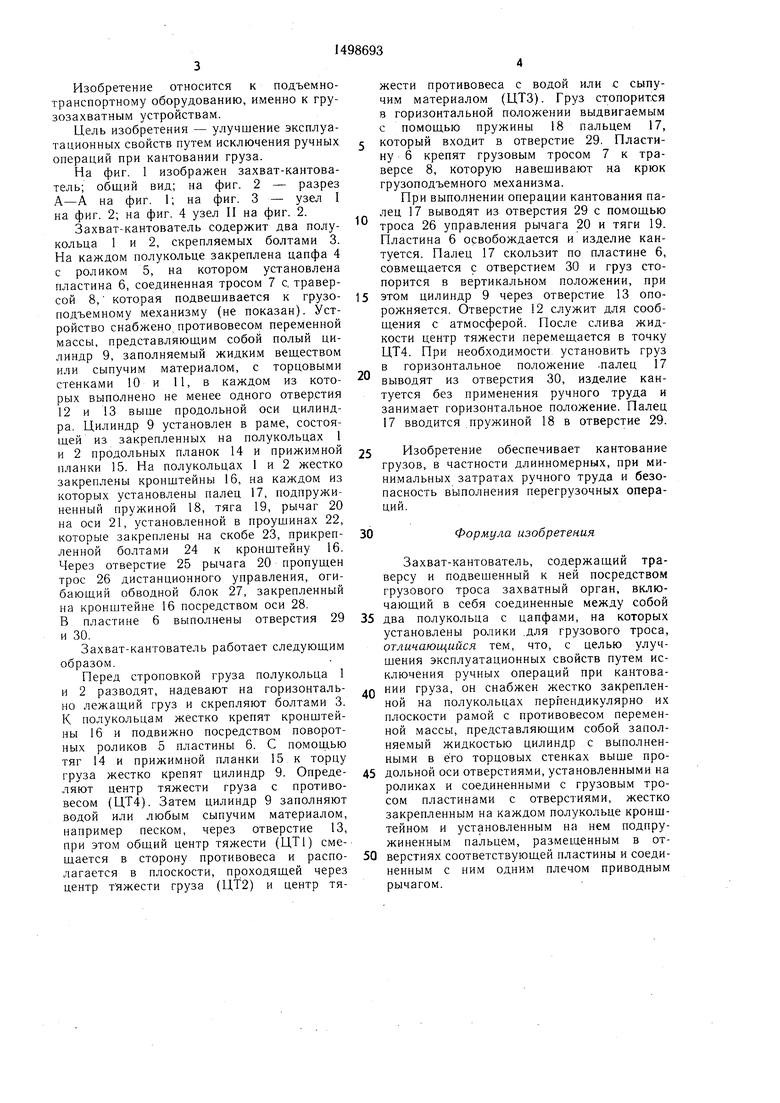
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват для цилиндрических грузов | 1973 |
|
SU485945A1 |
| Захват-кантователь | 1985 |
|
SU1341143A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 1989 |
|
SU1640913A1 |
| Захват-кантователь для цилиндрических грузов | 1981 |
|
SU1006357A1 |
| СПОСОБ ПОДЪЁМА И РАЗГРУЗКИ НЕСУЩЕЙ ТАРЫ | 2013 |
|
RU2554908C2 |
| Крановый захват-кантователь | 1976 |
|
SU640957A1 |
| Устройство для кантования изделий | 1990 |
|
SU1782877A1 |
| КАНТОВАТЕЛЬ-ТРАВЕРСА | 1972 |
|
SU324208A1 |
| Захват-кантователь для грузов цилиндрической формы | 1987 |
|
SU1504199A1 |
| Крановый захват-кантователь | 1978 |
|
SU779270A1 |
Изобретение относится к подъемно-транспортному оборудованию, а именно к грузозахватным устройствам. Целью изобретения является улучшение эксплуатационных свойств устройства путем исключения ручных операций при кантовании груза. Захват-кантователь содержит траверсу 8, подвешенные к ней на тросе 7 пластины 6, на которых посредством роликов 5 установлены полукольца, охватывающие груз. К полукольцам прикреплен цилиндр 9 с отверстиями 12 и 13, заполняемый жидкостью. В пластинах 6 выполнены отверстия 29 и 30, а на полукольцах посредством кронштейна установлены подпружиненные фиксирующие пальцы с тросом дистанционного управления. При кантовании груза цилиндр 9 заполняют жидкостью, смещая центр тяжести системы. После занятия грузом вертикального положения оно фиксируется пальцем, входящим в отверстие пластины 6, жидкость вытекает из цилиндра 9. После этого груз может быть переведен вновь в горизонтальное положение путем вывода пальца из отверстия пластины 6. При этом не требуется прилагать дополнительные усилия для кантования, обеспечивается безопасное выполнение операций. 4 ил.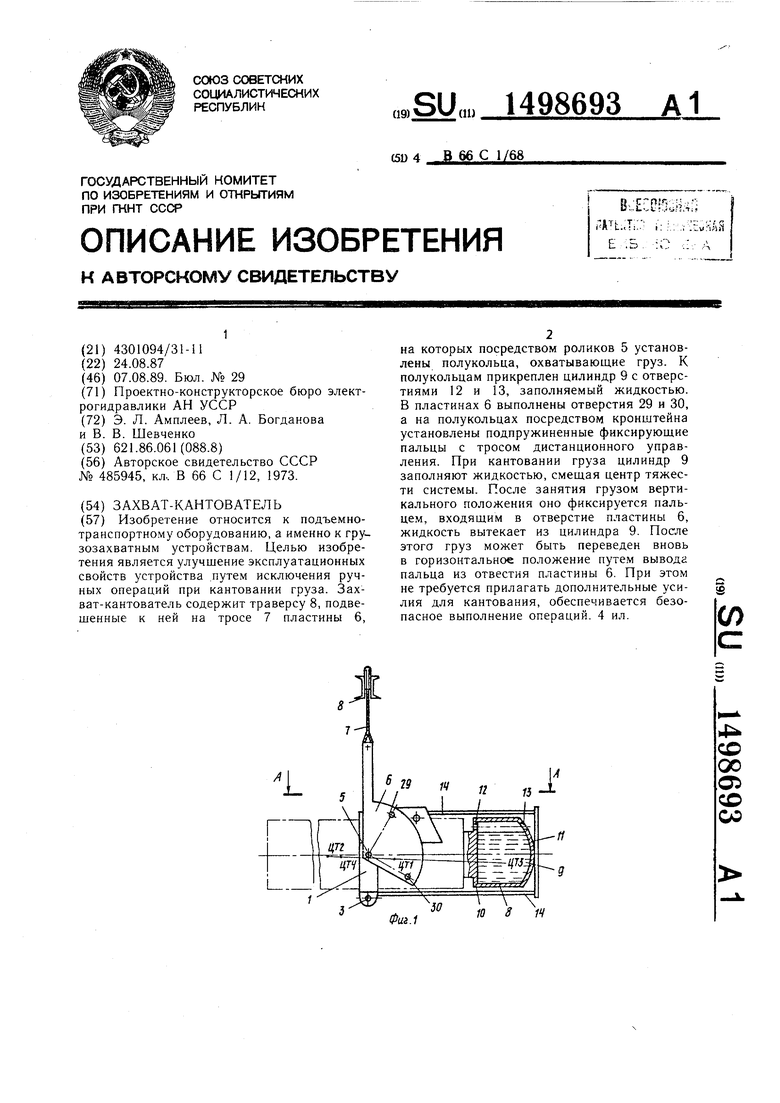
19
2Q
Фиг.З
Фиг A
16
| Захват для цилиндрических грузов | 1973 |
|
SU485945A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
