Ви9А
л
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват-кантователь | 1987 |
|
SU1498693A1 |
| Захват-кантователь | 1980 |
|
SU992388A1 |
| Захват-кантователь | 1989 |
|
SU1794852A1 |
| Захват-кантователь для рулонов листовой стали | 1979 |
|
SU977354A1 |
| Захват-кантователь для цилиндрических грузов | 1981 |
|
SU1006357A1 |
| Захват-кантователь для изделий с цапфами | 1980 |
|
SU958296A1 |
| Захватное устройство для грузов с цапфами | 1982 |
|
SU1100217A1 |
| Устройство для кантования изделий | 1990 |
|
SU1782877A1 |
| Захват-кантователь | 1979 |
|
SU823260A1 |
| Крановый захват-кантователь | 1976 |
|
SU640957A1 |



Изобретение относится к подъемно-транспортному оборудованию. Цель изобретения - повышение надежности и обеспечение захвата и кантования грузов цилиндрической формы разного диаметра. Захват-кантователь содержит П-образную траверсу 1, вертикальные тяги, которые соединены с вертикальными стойками траверсы 1 шарнирно с помощью вертикально установленных пальцев. На вертикальных тягах установлены цапфы, к которым закреплены центры захватных органов, выполненных в виде двух упругих полуколец 13 и 16, одни концы которых соединены шарниром, а другие-разъемным соединением 19. 7 ил.
и
Vt
16
П
19
ел
о
Oiik
QD
;о
Изобретение относится к rioAiiCMHo- транспортной технике, а именно к захватам-кантователям для грузов цилиндрической формы.
Целью изобретения является повышение надежности и обеспечение захвата и кантования грузов цилиндрической форм1я разного диаметра..
На фиг. 1 изображен подвесной зах-Ю приблизительно посередине захватываемого груза (обечайки, установленной торцом), после чего посредством разъемного винтового соединения 19 производят стяжку полуколец 13 и 16 путем поворота рукоятки 21 винта 20. При этом свободные конпд винта 20, снабженные правой и левой резьбой, вращаясь вокруг своей оси, свинчивают (сводят) гайки 22, закрепленные на свободных концах полуколец 13 и 16. Благодаря резиновым прокладкам 14 и 17, закрепленным на внутренних поверхностях гибких полуколец 13 и 16, прилегание захватных органов 10 и 1 1 к обечайке производится п.потно без зазоров. Затем включают механизм 23 кантования и производится кантование обечайки.
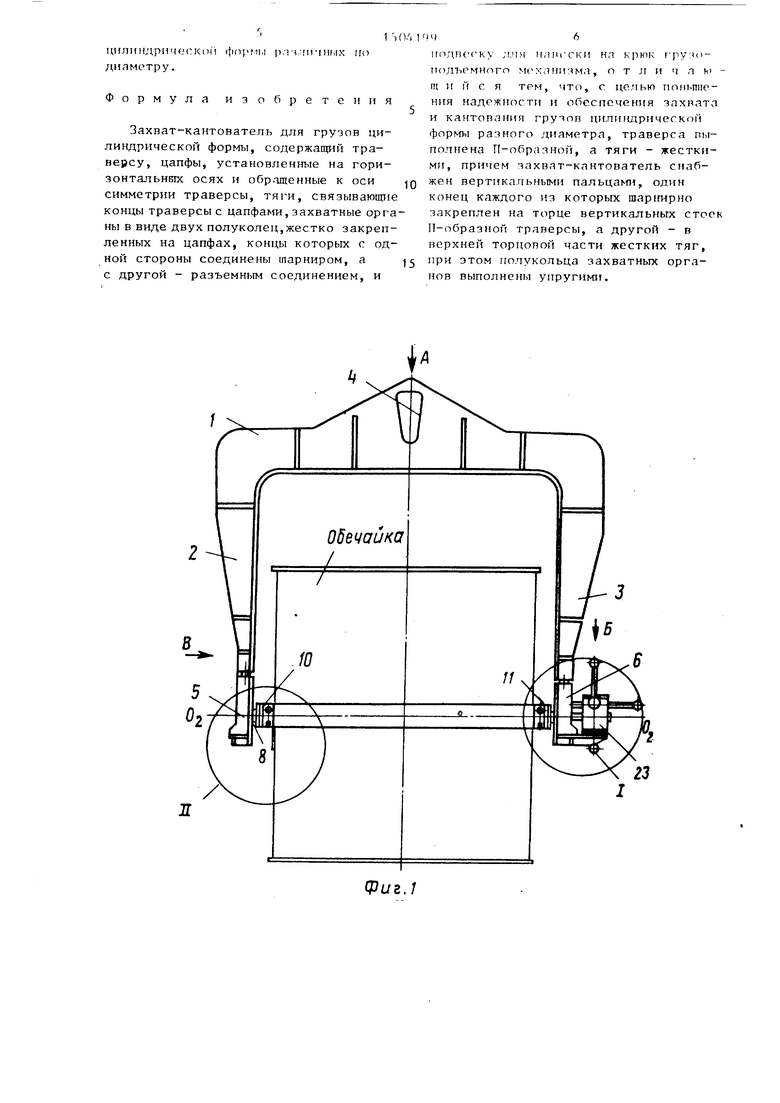
ват-кантователь для грузов цилиндрической формы, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - вид Б на ф:1г. 1; на фиг. 4 - вид В на фиг. 1; на фчг. 5 - узел I на фиг. 1; на |5 фиг. 6 - узел II на фиг. 1; на фиг. 7 - узел III на фиг. 4.
З.ахват-кантователь для грузов цилиндрической формы содержит П-образ- нуто траверсу 1 с вертикальными стой- 20 ками 2 и 3, подвеской 4 для навески на KfiroK грузового крана (фиг. 1).
К вертикальным стойкам 2 и 3 траверсы торцами шарнирно прикреплены вертикальные тяги 5 и 6, а шарнир 25 вьтолнен в виде пальца 7, расположенного.вдоль вертикальной оси ОjO вертикальных стоек 2 и 3 (фиг. 5).
На вертикальных тягах 5 и 6 посредством шарниров 8 и 9 подвижно ус- 30 тановлены захватные органы 10 и 11. Ось шартров 8 и 9 расположена перпендикулярно вертикальной оси 0,0, вертикальных стоек 2 и 3.
Захватный орган 10, жестко скреп- .35 ленный с шарниром В, содержит цапфу 12 и жестко соединенные с ней упругое полукольцо 13, снабженное рггзиновой прокладкой 14 (фиг. 7).
Захватный орган 11, жестко скреп- 40 ленный с шарниром 9, содержит приводную цапфу 15 и жестко соединенное с ней полукольцо 16, снабженное резиновой прокладкой 17 (фиг. 6).
ваемого груза (обечайки, установле ной торцом), после чего посредство разъемного винтового соединения 19 производят стяжку полуколец 13 и 1 путем поворота рукоятки 21 винта 2 При этом свободные конпд винта 20, снабженные правой и левой резьбой, вращаясь вокруг своей оси, свинчивают (сводят) гайки 22, закрепленн на свободных концах полуколец 13 и 16. Благодаря резиновым прокладкам 14 и 17, закрепленным на внутренни поверхностях гибких полуколец 13 и 16, прилегание захватных органов 1 и 1 1 к обечайке производится п.потн без зазоров. Затем включают механи 23 кантования и производится канто вание обечайки.
Если необходимо произвести зах- ват и кантование обечайки с меньши диаметром, то в этом случае при ст гивании полуколец 13 и 16 путем св чивания гаек 22 вдоль винта 20 про исходит и разворот в горизонтапьно плоскости цапф 12 и 15, жестко скр ленньк с полукольцами 13 и 16 (фиг Разворот цапф 12 и 15 происходит за счет шарнирного соединения верт кальньк тяг 5 и 6 со стойками трав сы 2 и 3. При этом захватные орган 10 и 11, обладая двумя степенями с боды (за счет шарнирного соединени к вертикальной тяги и вертикальной тяг И к стойке траверсы) , разворачи
Упругие полукольца 13 и 16 с одной 45 занимая удобное положение.
зажимают обечайку.
стороны соединены между собой посредством шарнира 18, ас другоГт стороны - разъемным винтовым соединением 19 (фиг. 2).
Винтовое соединение 19 состоит из винта 20 с правой и левой розьбо длиной 1 на , рукоятки 21 и гаек 22, закрепленных на свпбодных стягиваемых полукольцах 13 и 16 (фиг. 2).
На вертикапг.пой тяге 6 см1)нтирован механизм 23 кантования, вьгхол.иой ваг: 24 редуктора посррдстиом сое.цичмтельной муфты 25 жестко свичап г шарниром 9 принодной цг1П(111.1 15 (фиг. 6).
Захпат-клитовлтель подвеской 4 навешивается на кркж грузоподъемного механизма и наводится на груз, например обечайку.
При опускании зпхвата-каитователя захват1{1 1с органы 10 и 11 устакаплива приблизительно посередине захватываемого груза (обечайки, установленной торцом), после чего посредством разъемного винтового соединения 19 производят стяжку полуколец 13 и 16 путем поворота рукоятки 21 винта 20. При этом свободные конпд винта 20, снабженные правой и левой резьбой, вращаясь вокруг своей оси, свинчивают (сводят) гайки 22, закрепленные на свободных концах полуколец 13 и 16. Благодаря резиновым прокладкам 14 и 17, закрепленным на внутренних поверхностях гибких полуколец 13 и 16, прилегание захватных органов 10 и 1 1 к обечайке производится п.потно без зазоров. Затем включают механизм 23 кантования и производится кантование обечайки.
Если необходимо произвести зах- ват и кантование обечайки с меньшим диаметром, то в этом случае при стягивании полуколец 13 и 16 путем свинчивания гаек 22 вдоль винта 20 происходит и разворот в горизонтапьной плоскости цапф 12 и 15, жестко скреп ленньк с полукольцами 13 и 16 (фиг . 8) Разворот цапф 12 и 15 происходит за счет шарнирного соединения верти- кальньк тяг 5 и 6 со стойками траверсы 2 и 3. При этом захватные органь 10 и 11, обладая двумя степенями свободы (за счет шарнирного соединения к вертикальной тяги и вертикальной тяг И к стойке траверсы) , разворачи занимая удобное положение.
зажимают обечайку.
При включении кантующего механизма 23 крутящий момент выходного вала 24 редуктора передается через соединительную иуфту и шарнир 9 приводной цапфе 15, которая, поворачиваясь вокруг оси ,j, приводит во вращение цапфу 12. Обе цапфы, вращаясь вокруг оси OjOj, кантуют обечайку.
Стягивая или разводя конц1)1 полуколец 12 и 15 посредством разъемного винтового соединения 19, можно производить захват и кантование грузов
ИИлиндричегкоГ ({ ipfbi рлчлпчир.гх no диаметру.
Формула изобретения
Захват-кантователь для грузов цилиндрической формы, содержащий траверсу, цапфы, установленные на гори- зонтальнвтх осях и обр.чщенные к оси симметрии траверсы, тяги, связывающие концы траверсы с цапфами, захватные органы в виде двух полуколец,жестко закрепленных на цапфах, концы которых с одной стороны соединены шарниром, а с другой - разъемным соединением, и
Обечайка /
)6
подгич ку ;1,.пя нпнсски нп крюк r py;(i- подърмного )ii;iMa, о т л и ч л ю - ГЦ и и с я тем, что, с целью гишьппе- ния надежности и обеспечения захпатл и кантовлнип трутов цилиндрической формы разного диаметра, траверса выполнена П-образной, а тяги - жесткими, причем захват-кантователь снабжен вертикальными пальцаьш, один конец каждого из которых mapimpno закреплен на торце вертикальных стоек П-образной траверсы, а другой - в верхней торцовой части жестких тяг, при этом полукольца захватных органов выполнены упругими.
23
(Риг.1
Виде
фиг.
Фи.З
фиг.5
Фиг. 6
Фиг. 7
| ПОДВЕСНОЙ КАНТОВАТЕЛЬ | 0 |
|
SU404751A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
