Изобретение относится к грузоподъемному оборудованию, а именно к подъемникам с фиксированным стуненчатым перемещением платформы.
Цель изобретения - повышение эксплуатационных качеств путем обеспечения контроля положения платформы.
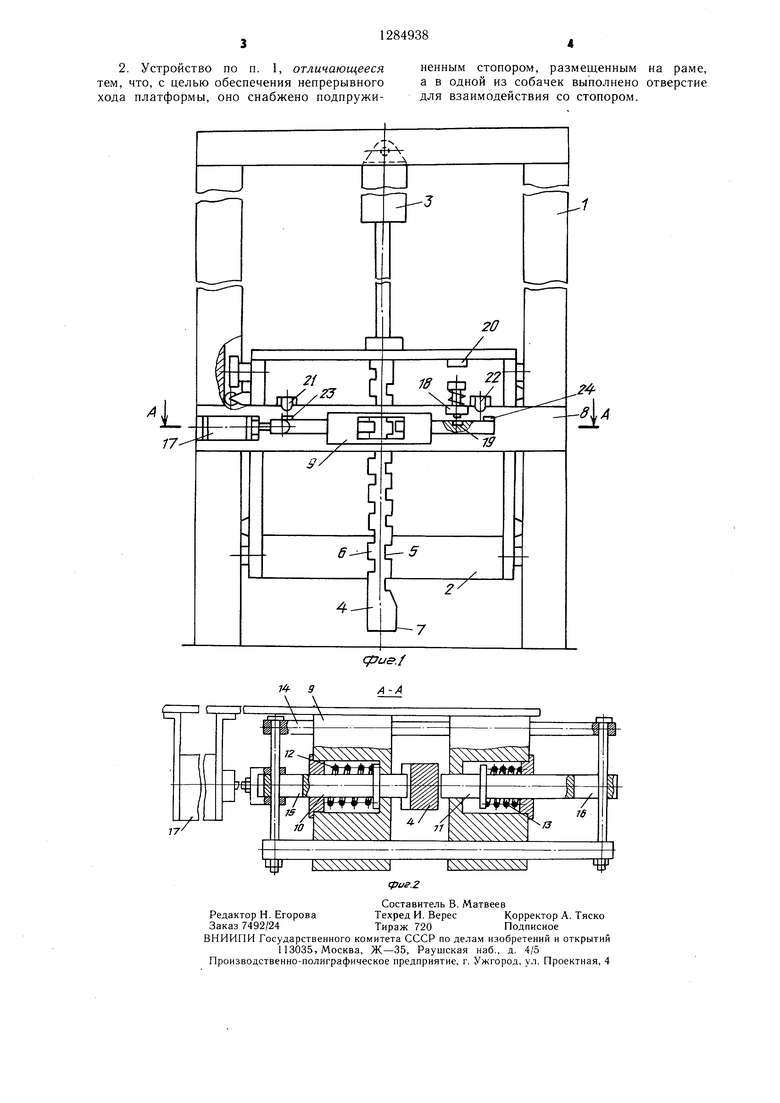
На фиг. 1 схематично дано устройство, общий вид; на фиг. 2 - разрез А-А на фиг. 1.
Устройство содержит раму 1, на которой подвижно закреплена платформа 2, цилиндр 3 подъема и зубчатая рейка 4 с двумя рядами зубьев 5 и 6, распо.тоженных в щахматном порядке по обе стороны рейки, выступ 7, выполненный на рейке 4, фиксатор 8, представляющий собой подвижно установленные в корпусе 9 рамы 1 цилиндри ческие собачки 10 и 11 с пружинами 12 и 13 и тяговую рамку 14, соединенную с продольными пазами 15 и 16 собачек и щтоком цилиндра 17. На корпусе 9 фиксатора 8 установлен подпружиненный стопор 18 (фиг. 1) с возможностью взаимодействия с одной из собачек, например с собачкой 11, имеющей гнездо 19, и с упором 20 платформы 2.
На корпусе 9 установлены конечные выключатели 21 и 22 (фиг. 2), а на собачках 10 и 11 закреплены флажки 23 и 24.
Устройство работает следующим образом.
В крайнем нижнем положении платформы 2 стопор 18 под действием упора 20 входит в гнездо 19 собачки 11, после чего щток цилиндра 17 автоматически перемещается влево, выводя собачку 10 из зацепления с зубом рейки 4. Собачка 11 при взаимодействии пружины 13 и стопора 18 остается в прежнем положении. После этого платформа 2 цилиндром 3 подъема перемещается бесступенчато в верхнее крайнее рабочее положение, в котором выступ 7 рейки 4 действует на собачку 11, которая перемещается вправо (фиг. 2) благодаря наличию продольного паза 16 в собачке и освобождает нодпружиненный стопор 18, который выходит из гнезда 19, переводя устройство в режим ступенчатого перемещения.
При необходимости перемещения платформы 2 на щаг зуба рейки 4 цилиндр 17 перемещает тяговую рамку 14 в одну из сторон (в данном случае влево), тем самым сжимает пружину 12, которая воздействуя на собачку 10, выводит ее из зацепления со страховочной рейкой 4.
Флажок 23 отходит от конечного выключателя 21, сигнализируя о том, что можно перемещать платформу 2 цилиндром 3 подъема.
Одновременно тяговая рамка 14 (при движении влево) дает возможность собачке 11 упереться в ряд зубьев 5 страховочной рейки 4 под действием пружины 13 (фиг. 2).
При движении платформа 2 перемещает страховочную рейку 4, по ряду зубьев 5
которой скользит собачка 11 до попадания в ближайшую впадину между зубьями. При этом собачка 11, перемещаясь влево, посредством флажка 24 включает конечный выключатель 22, который отключает цилиндр 3 подъема.
При необходимости следующего перемещения платформы 2 цилиндр 17 перемещает вправо тяговую рамку 14, которая через продольный паз 16 выводит из впадины ряда зубьев 5 рейки 4 собачку П.. Собачка 10 упирается в ряд зубьев 6 рейки 4. Собачка 10 попадает в очередную впадину между зубьями 6 рейки 4, включает выключатель 21, который отключает цилиндр 3 подъем а.
Использование предлагаемого устройства по сравнению с известным позволяет обеспечить постоянные страховку и контроль положения платформы подъемника за счет выполнения зубьев страховочной рейки прямоугольными и выполнения фиксатора в виде корпуса с подвижно установленными в нем цилиндрическими собачками и тяговой рамкой, соединенной со щтоком цилиндра и продольными пазами собачек.
Обеспечение непрерывного хода рейки достигается благодаря наличию стопора,
установленного на корпусе фиксатора с возможностью взаимодействия одной из собачек и упором платформы.
35
Формула изобретения
1. Устройство для ступенчатого перемещения платформы, содержащее раму, платформу, подвижно установленную на ра.ме и связанную с ней, привод подъема в виде
силового цилиндра, фиксатор положения платформы, включающий в себя закрепленную на платформе зубчатую рейку с двумя рядами зубьев, расположенных в шахматном порядке по обе стороны рейки, рамку, установленную на раме с возможностью перемещения в горизонтальной плоскости и снабженную подпружиненны.ми собачками, привод горизонтального перемещения рамки относительно рамы, выполненный в виде силового цилиндра двустороннего действия,
0 отличающееся тем, что, с целью повышения эксплуатационных качеств путем обеспечении контроля положения платформы, оно снабжено конечными выключателями для управления силовым цилиндром привода подъема платформы, закрепленными на раме
5 и упорами для взаимодействия с конечными выключателями, закрепленными на собачках, которые выполнены цилиндрическими, а зубья рейки выполнены прямоугольными.
2. Устройство по п. 1, отличающееся тем, что, с целью обеспечения непрерывного хода платформы, оно снабжено подпружиненным стопором, размещенным на раме, а в одной из собачек выполнено отверстие для взаимодействия со стопором.
77
ср1/г.2
Составитель В. Матвеев
Редактор Н. ЕгороваТехред И. ВересКорректор А. Тяско
Заказ 7492/24Тираж 720Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4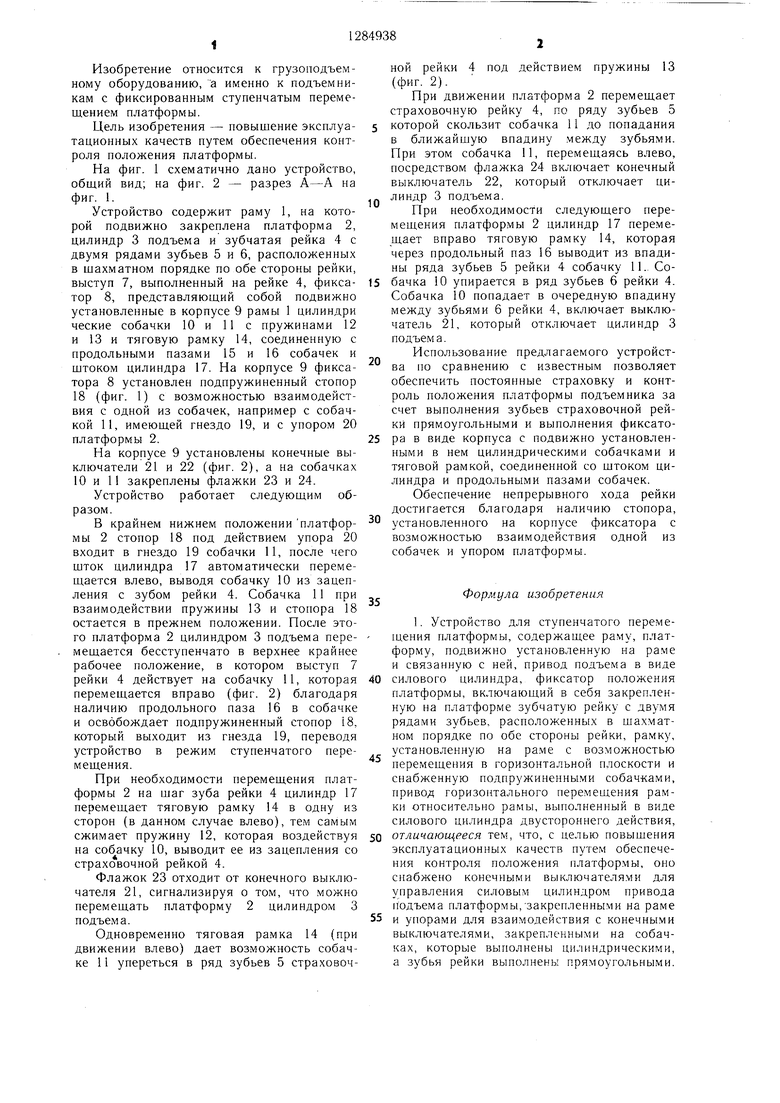
| название | год | авторы | номер документа |
|---|---|---|---|
| Предохранительное устройство подъемника | 1984 |
|
SU1208010A1 |
| Предохранительное устройство для круглопильного станка | 1982 |
|
SU1036530A1 |
| Предохранительное устройство подъемника | 1980 |
|
SU1041506A1 |
| Устройство для шаговых перемещений груза | 1989 |
|
SU1698155A1 |
| Устройство для перфорирования и отрезки полосового и ленточного материала | 1980 |
|
SU984863A1 |
| Устройство для стягивания концов тяговой цепи скребкового конвейера | 1982 |
|
SU1025610A1 |
| Устройство для штабелирования деталей с отверстиями | 1986 |
|
SU1459780A2 |
| Устройство для маркирования листового материала | 1982 |
|
SU1159679A1 |
| Предохранительное устройство для круглопильного станка | 1976 |
|
SU604682A1 |
| Лесопосадочная машина | 1987 |
|
SU1463163A1 |
Изобретение относится к подъёмно- транспортному оборудованию. Целью изобретения является обеспечение контроля положения платформы. Это достигается тем, что в устройстве, содержащем закрепленную на платформе рейку с двумя рядами зубьев и фиксатор ее положения, включающий в себя подпружиненные собачки, соединенные со щтоком цилиндра, зубья рейки выполнены прямоугольными, а фиксатор выполнен в виде корпуса с подвижно установленными в нем цилиндрическими собачками и рамкой, соединенной со штоком цилиндра и продольными пазами собачек. На корпусе фиксатора установлен подпружиненный стопор с возможностью взаимодействия с ОД.НОЙ из собачек и с платформой. 1 з.п. ф-лы, 2 ил. to 00 00 00
| Предохранительное устройство подъемника | 1984 |
|
SU1208010A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
