Изобретение относится к машиностроению, а именно к роботостроению.
Цель изобретения - расширение технологических возможностей манипулятора и точности позиционирования за счет выполнения гибких тяг общими для всех звеньев и введения механизмов позиционирования звеньев.
На фиг. изображена рука манипулятора, общий вид; на фиг.2 - разрез А-А на фиг.I; на фиг.З - разрез Б-Б на фиг.2.
Манипулятор состоит из основания 1, на котором расположена рука 2 с рабочим органом 3. Механическая рука выполнена в виде набора звеньев 4 с фланцами 5, соединенных между собой сферическими поверхностями с образованием внутренней (охватываемой) и наружной (охватывающей) частей 6 и 7 сферического шарнира. Наружная поверхность наружной части 7 шарнира также выполнена сферической,
В отверстиях фланцев 5 расположены гибкие тяги 8, каждая из которых одним концом соединена с приводом ее натяжения (не показан), а другим на конечном звене - с рабочим органом 3 Каждое звено содержит датчики положения 9, установленные между фланцами 5, и механизм фиксации его положения включающий стенку 10, расположенную на конце звена 4 со стороны внутренней части 6 шарнира, охватывающую наружную часть 7 шарнира с образованием герметичной полости между сферической поверхностью внутренней части 6 шарнира и внутренней поверхностью стенки 10. На наружной поверхности стенки расположена электрическая обмотка 11, а полость заполнена ферромагнитной жидкостью 12. Механическая рука закрыта гибки1 кожухом 13.
Манипулятор работает следуюш 1м образом.:
В соответствии с заданной программой и информацией о положении звеньев, которые вводятся в систему управления (не показана), последняя выдает команды на приводы гибких тяг 8, и на управление током в обмотках 11,
Приводы изменяют усилия натяжения в гибких тягах 8, при этом конечное звено, соединенное с тягами, совершает угловое перемещение вокруг центра сферы внутренней части в шарнире в сторону тяги 8 с увеличенным усилием, еспи его обмотка 1I обесточена. Датчики положения 9 следят за угло- вьш перемещением звена и постоянно передают информацию в систему управления. Последняя корректирует положение рабочего органа 3 через приводы натяжения гибких тяг 8 и обеспечивает перемещение звена 4 в заданном направлении, а при перемещении звена на заданный угол включает обмотку 11. Ферромагнитная жидкость 12 под действием магнитного поля, создаваемого обмоткой П, затвердевает, и звено .относительно соседнего звена неподвижно, а усилие передается на соседнее звено. Теперь соседнее звено совершает угловое перемещение в заданном направлении и на заданный угол. Изменяя напряженность магнитного поля, можно изменять вязкость ферромагнитной жидкости, при этом скорость перемещения звена также изменяется, а часть усилия передается на соседнее звено. Если соседнему звену по программе разрешено перемещаться в том же направлении, то они перемещаются вместе, т.е. управляя напряженностью магнитного поля, система управления обеспечивает независимо друг от друга управление скоростью перемещения каждого звена, последовательностью их перемещений, а также остановкой, при этом ферромагнитная жидкость в полостях звеньев, не участвующих в изменении конфигурации руки, остается затвердевшей.
Так как каждое звено независимо друг от друга может перемещаться в любом направлении по сфере и На любой угол (в пределах разрешенного угла поворота), то рабочий орган руки может перемещаться в пространстве, ограниченном сферами наименьше- го и наибольшего радиусов изгиба ру- дси вокруг оси манипулятора.
/3
Фи.2 6-6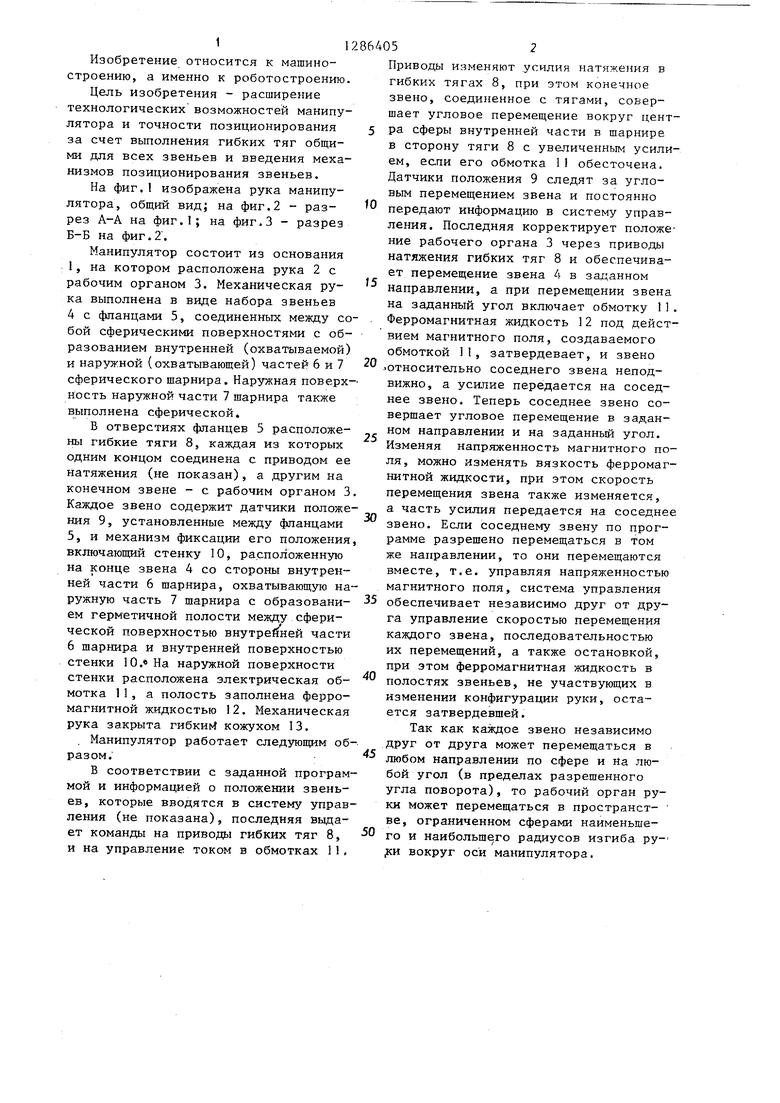
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука манипулятора | 1984 |
|
SU1332690A1 |
| Рука тензорного манипулятора | 1983 |
|
SU1114545A1 |
| Центрирующий захват | 1991 |
|
SU1811480A3 |
| Робот манипуляционный промышленный | 2019 |
|
RU2718025C1 |
| Рука тензорного манипулятора | 1984 |
|
SU1202851A1 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА ДЛЯ ВЫПОЛНЕНИЯ МИНИМАЛЬНЫХ ИНВАЗИВНЫХ ВМЕШАТЕЛЬСТВ | 2007 |
|
RU2412800C2 |
| Гибкий исполнительный орган манипулятора | 2018 |
|
RU2691807C1 |
| Линейный электропривод | 1987 |
|
SU1529364A1 |
| ЛЕЧЕБНО-ТРЕНИРОВОЧНЫЙ ПРОТЕЗ РУКИ | 1994 |
|
RU2082359C1 |
| ЗМЕЕВИДНАЯ РУКА РОБОТА | 2002 |
|
RU2301143C2 |
& -Л/
Фиг.1
Y/fffФиз.Ъ
ВНИИПИ Заказ 7665/15 Тираж 950 Подписное Произв.-полигр. пр-тие, г. Ужгород, ул. Проектная, 4
| Манипулятор | 1979 |
|
SU814721A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
