1
Изобретение от осится к машиностроению, а именно к манипуляторам для механизации и автоматизации ра- бот в .труднодоступных местах или по вредных условиях.
Целью изобретения является расширение технологичесК1-гх возможностей за счет увеличения рабочей зоны тини пулятора,
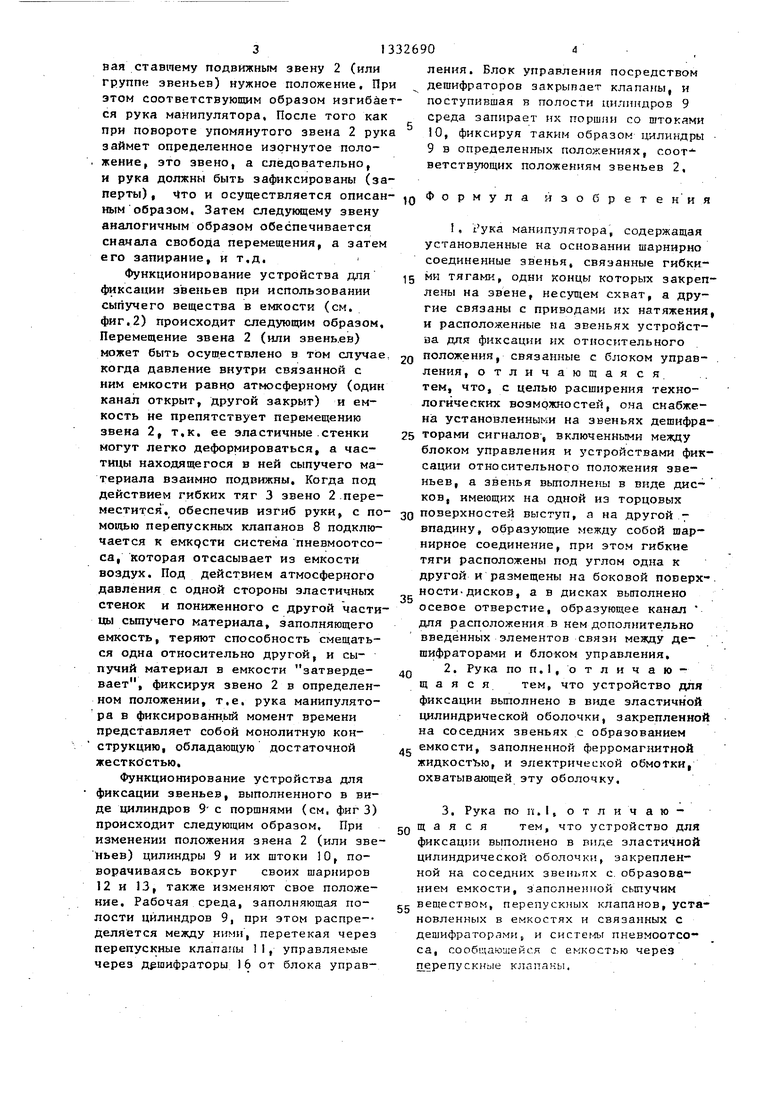
На фиг,1 изображена рука манипулятора, обпщй вид; на фиг.2 - устройство фиксации, первый вариант; на фиг.З - то же 5 второй вариант; на фиг,4 - звено с вкладышем.
Рука манипулятора содержит основание IP звенья 2j связанные гибкими rnraNBi 3 (лентами) J подключенными к индивидуальным приводам 4 их натяжения, и схват (не показан).
Между звеньями 2 расположены устройства для их фиксации, каждое из которых может быть выполнено в виде эластичной цилиндрической оболочки 5, закрепленной на соседних звеньях с образованием емкости, заполненной ферромагнитной жидкостью, и электрической обмотки 6, охватывающей эту оболочку (см. фиг,.)
Устройство для фиксации -может быть таюке выполнено в виде цилиндрическо эластичной оболочки 7 закрепленной на соседних звеньях с образованием емкости, заполненной сыпучим веп1,ест- вом, и перепускнъ х клапанов 8, ч.е- рез которые емкость сообщается с системой пневмоотсоса (не показана).
Кроме того, устройство для фиксации звеньеч может быт ь выполнено в виде цилиндров 9 с поршнямиj снабженными шт оками 10, и перепусных клапанов 1i, через которые сообщаются полости .цилиндров. Цилиндры- 9 и штоки 10 через шарниры 12 и 13 соответствено связаны с соседними звеньями,
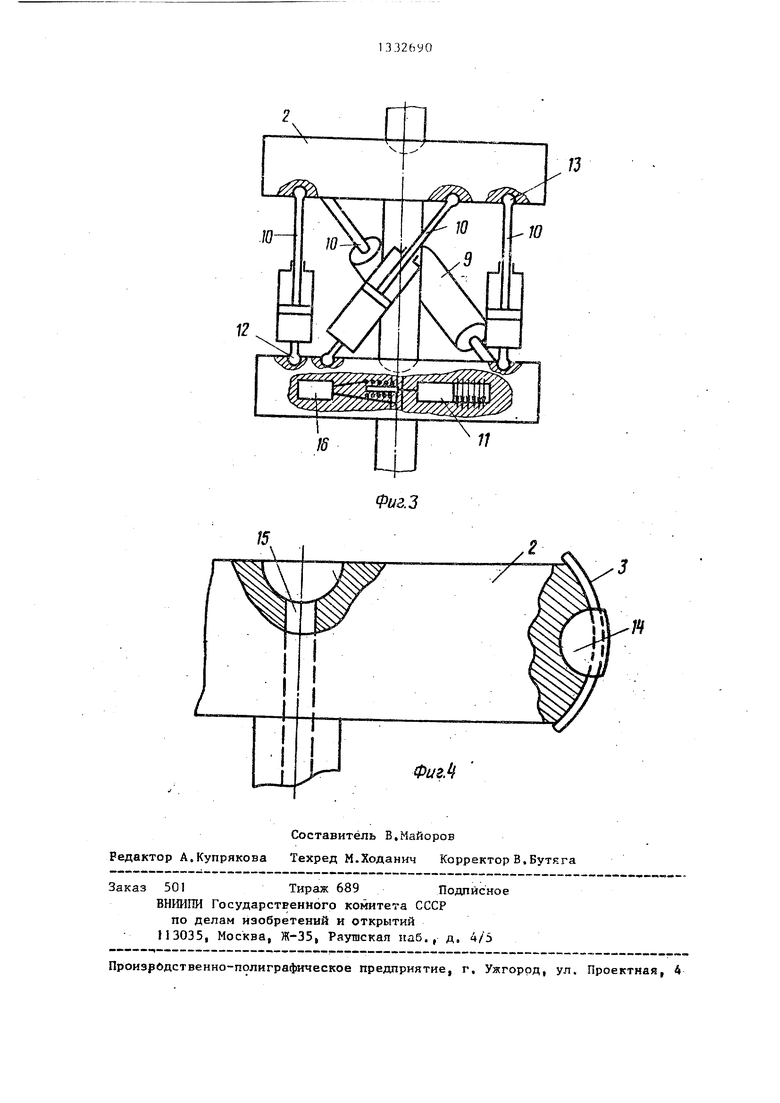
Звенья 2 выполнены в виде дисков, имеющих на одной из своих тор цовых поверхностей выступы, а на другой - впйдину, образующие шарнирное соединение. При этом гибкие тяги 3 расположены под углом одна к другой и размещены на боковой поверхности дисков во вкладышах 14, В дисках 3 выполнено осевое отв.ерстие 15, образующее канал для расгтоложения в нем элементов связИв которые обеспечивают соединение дешифраторов I6 с блоком управления (не показаны), В зависи- мости от вынолнения устройства для
10
326902
фиксации звеньев через дршифратор 16 поисходит управление током п обмотке 6 (см. фиг,1) или управление положением nepenyckHbix клапанов 8 (см. фиг,2) или клапанов (см, фиг,3.).
Рука манипулятора работает следующим образом,
1 первоначальный момент времени псе звенья 2 заперты, т,е. зафиксированы в определенных положениях, а тяги 3 натянуты с одинаковыми усилиями, В соответствии с программой работ блок управления выдает команды ройству для фиксации звеньев и приводам 4 гибких тяг 3 на поворот того или иного звена 2 (или звеньев). При этом емкость (или емкости) фиксирующего устройства, связанная с зтим
2fj звеном (или звеньями) , должна быть эластичной и не препятствовать повороту соответствующего звена (или звеньев) , Каждый привод 4 воздействует на связанную с ним гибкую тягу 3 и
25 посредством нее - на участки звеньев 2, с которыми она контактирует, в результате чего гибкие тяги 3 повора-. чивают незафиксированное звено 2 . (или звенья) относительно остальных звеньев в нужное положение. После того как подвижное звано 2 переместит30
5
0
ся, обеспечив определенный изгиб руки, оно должно быть зафиксировано (заперто) в зтом положении. Для этого в случае выполнения устройства для фиксации с ферромагнитной жидкостью на обмотку 6, охватывающую соответствую - щую эластичную емкость, подается-пита ние, Питание включается дешифратором 16, для чего по элементам свя-зи от блока управления передается код его адреса. Под действием электромагнитного поля обмотки 6 ферромагнитная жидкостьS заполняющая емкость (до это- го свободно перераспределявшаяся
внутри емкости и не препятствовавшая перемещению звена 2), как бы затвердевает, придавая емкости форму, соответствующую новому положению звена, Далее-отпирается следующее звено 2 (или звенья), для чего подача питания к соответствующей обмотке 6 прекращается, а при исчезновении электромагнитного поля феррома1 }Л1Тная жидкость, заполняющая емкость, охваченную этой обмоткой, размягчается, и емкость снова становится эластичной и не препятствует двияг.нйям звена 2, Приводы 4 натягивают тяги 3, прида- .
0
5
вая ставшему подвижным звену 2 (или группе звеньев) нужное положение. При этом соответствующим образом изгибается рука манипулятора, После того как при повороте упомянутого звена 2 рука займет определенное изогнутое положение, это звено, а следовательно, и рука должны быть зафиксированы (заперты) , tTo и осуществляется описанным образом. Затем следующему звену аналогичным образом обеспечивается сначала свобода перемещения, а затем его запирание, и т,д.
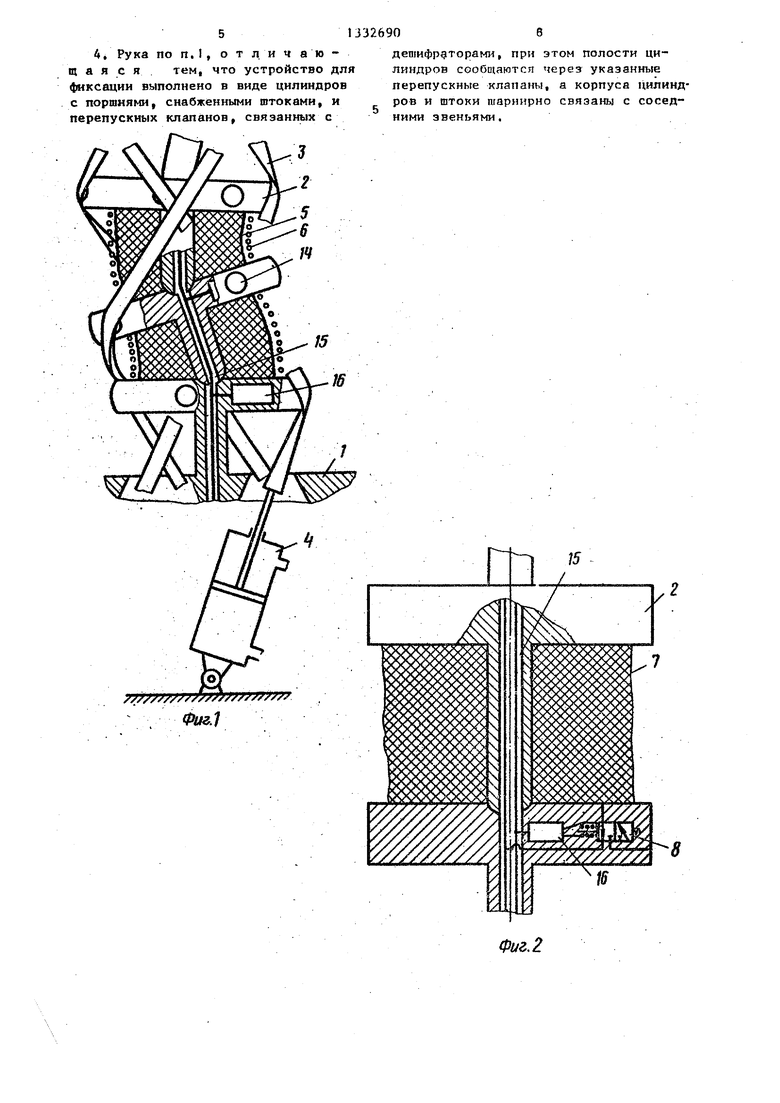
Функционирование устройства для фиксации звеньев при использовании сыпучего вещества в емкости (см, фиг,2) происходит следующим образом. Перемещение звена 2 (или звень.ев) может быть осуществлено в том случае, когда давление внутри связанной с ним емкости равно атмосферному (один канал открыт, другой закрыт) и емкость не препятствует перемещению звена 2, т,к, ее эластичные.стенки могут легко деформироваться, а частицы находящегося в ней сыпучего материала взаимно подвижны. Когда под действием гибких тяг 3 звено 2 переместится. обеспечив изгиб руки, с по- зо поверхностей выступ, а на другой 7
мощью перепускных клапанов 8 подключается к емкости система пневмоотсо- са, которая отсасывает из емкости воздух. Под действием атмосферного давления с одной стороны зластичных стенок и пониженного с другой частицы сьшучего материала, заполняющего емкость, теряют способность смещаться одна относительно другой, и сыпучий материал в емкости затвердевает, фиксируя звено 2 в определенном положении, т,е, рука манипулято- ра в фиксированн.ый момент времени представляет собой монолитную конструкцию, обладающую достаточной жесткостью.
Функционирование устройства для фиксации звеньев, выполненного в виде цилиндров 9 с поршнями (см, фиг 3) происходит следующим образом. При изменении положения звена 2 (или зве- ньев) цилиндры 9 и их штоки 10, поворачиваясь вокруг своих шарниров 12 и 13, также изменяют свое положение. Рабочая среда, заполняющая полости цилиндров 9, при этом распре- деляется между ними, перетекая через перепускные клапаны 1i, управляемые через дешифраторы 16 от блока управ35
40
впадину, образующие между собой шар нирное соединение, при этом гибкие тяги расположены под углам одна к другой и размещены на боковой повер ности-дисков, а в дисках выполнено осевое отверстие, образующее канал для расположения в нем дополнительно введенных элементов связи между дешифраторами и блоком управления,
2.Рука по п.1, о т л и ч а ю -
щ а я с я тем, что устройство дл фиксации вьшолнено в виде эластично цилиндрической оболочки, закрепленн на соседних звеньях с образованием jg емкости, заполненной ферромагнитной жидкостью, и электрической обмотки, охватывающей эту оболочку,
3,Рука по п.I, о т л и ч а ю CQ щ а я с я тем, что устройство дл фиксации выполнено в виде эластично цилиндрической оболочки, закрепленной на соседних звен1 пх с. образованием емкости, заполненной сыпучим
gg веществом, перепускных клапанов, уст новленных в емкостях и связанных с дешифраторамиS и систег г пневмоотсо са, сообщающейся с емкостью через п ерепускные клзпакы.
Ленин. Блок управления посредством дешифраторов закрыпает клапаны, и поступившая в полости цилии яров 9 среда запирает нх поршни со штоками 10, фиксируя таким образом 1дилиндры 9 в определенных положениях, соот- ветствующих положениям звеньев 2,
Формула изобретения
I, Рука манипулятора, содержащая установленные на основании шарнирно соединенные звенья, связанные гибки- ми тягами, одни концы которых закреплены на звене, несутцем схват, а другие связаны с приводами их натяжения, и расположенные на звеньях устройства для фиксации их относительного
положения, связанные с блоком управ- . ления, отличающаяся. тем, что, с целью расширения технологических возможностей, она снабжена установленными на звеньях дешифраторами сигналов-, включенными между блоком управления и устройствами фиксации относительного положения звеньев, а звенья вьшолнены в виде дне- ков, имеющих на одной из торцовых
5
0
впадину, образующие между собой шарнирное соединение, при этом гибкие тяги расположены под углам одна к другой и размещены на боковой поверх-. ности-дисков, а в дисках выполнено осевое отверстие, образующее канал для расположения в нем дополнительно введенных элементов связи между дешифраторами и блоком управления,
2.Рука по п.1, о т л и ч а ю -
щ а я с я тем, что устройство для фиксации вьшолнено в виде эластичной цилиндрической оболочки, закрепленной на соседних звеньях с образованием g емкости, заполненной ферромагнитной жидкостью, и электрической обмотки, охватывающей эту оболочку,
3,Рука по п.I, о т л и ч а ю щ а я с я тем, что устройство для фиксации выполнено в виде эластичной цилиндрической оболочки, закрепленной на соседних звен1 пх с. образованием емкости, заполненной сыпучим
g веществом, перепускных клапанов, установленных в емкостях и связанных с дешифраторамиS и систег г пневмоотсо- са, сообщающейся с емкостью через п ерепускные клзпакы.
4, Рука по П.1, о т ли ч аю - щ а я с я тем, что устройство для фиксации выполнено в виде цилиидров с поршнями, сиабженными готоками, и перепускиых клапанов, связанных с
дешифраторами, при этом полости цилиндров сооба1аются через указанные перепускные клапаны, а корпуса цилиндров и штоки шарнирно связаны с соседними звеньями.
16
Фиг.1
Фиг, 2
Фиг.З
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1985 |
|
SU1286405A1 |
| Манипулятор для доения | 1985 |
|
SU1273038A1 |
| Рука манипулятора | 1980 |
|
SU982896A2 |
| Манипулятор | 1989 |
|
SU1657370A1 |
| УСТАНОВКА ДЛЯ КЛАДКИ СТЕН ИЗ КИРПИЧА | 1991 |
|
RU2047714C1 |
| Рука манипулятора | 1987 |
|
SU1450995A1 |
| КОМБИНИРОВАННЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ЛЕГЧЕ ВОЗДУХА (ВАРИАНТЫ) | 2006 |
|
RU2318697C2 |
| Рука манипулятора | 1989 |
|
SU1673438A1 |
| МАНИПУЛЯТОР ДЛЯ ОЧИСТКИ ВАГОНОВ | 1987 |
|
RU2028226C1 |
| ПНЕВМАТИЧЕСКАЯ ПОДВЕСКА | 2006 |
|
RU2325568C1 |
Изобретение относится к машиностроению, а именно к манипуляторам для механизации и автоматизации работ ,в труднодоступных местах или во вредных условиях. Целью изобретения является расширение технологических возможностей за счет увеличения рабочей зоны манипулятора. В первоначальный момент времени все звенья 2 заперты, т.е. зафиксированы в определенных положениях, а тяги 3 натянуты с одинаковым усилием. При этом соседние звенья образуют шарнирное соединение, а тяги 3 расположены под углом одна к другой. В соответствии с программой работ блок управления выдает команды, которые через дешифраторы 16 воздействуют на устройства для 4 ксации звеньев 2 и обеспечивают при этом включение соответствующих приводов 4 гибких тяг 3 на поворот того или иного звена 2, которое затем снова фиксируется. Устройство для фиксации может быть выполнено в виде эластичной емкости, рабочей средой которой является ферромагнитная жидкость или супучее вещество, или в .виде цилиндров с поршнями и штоками, рабочие полости которых связаны через перепускные клапаны, 3 з.п. ф-лы. 4 ил. (/
| Рука тензорного манипулятора | 1984 |
|
SU1202851A1 |
