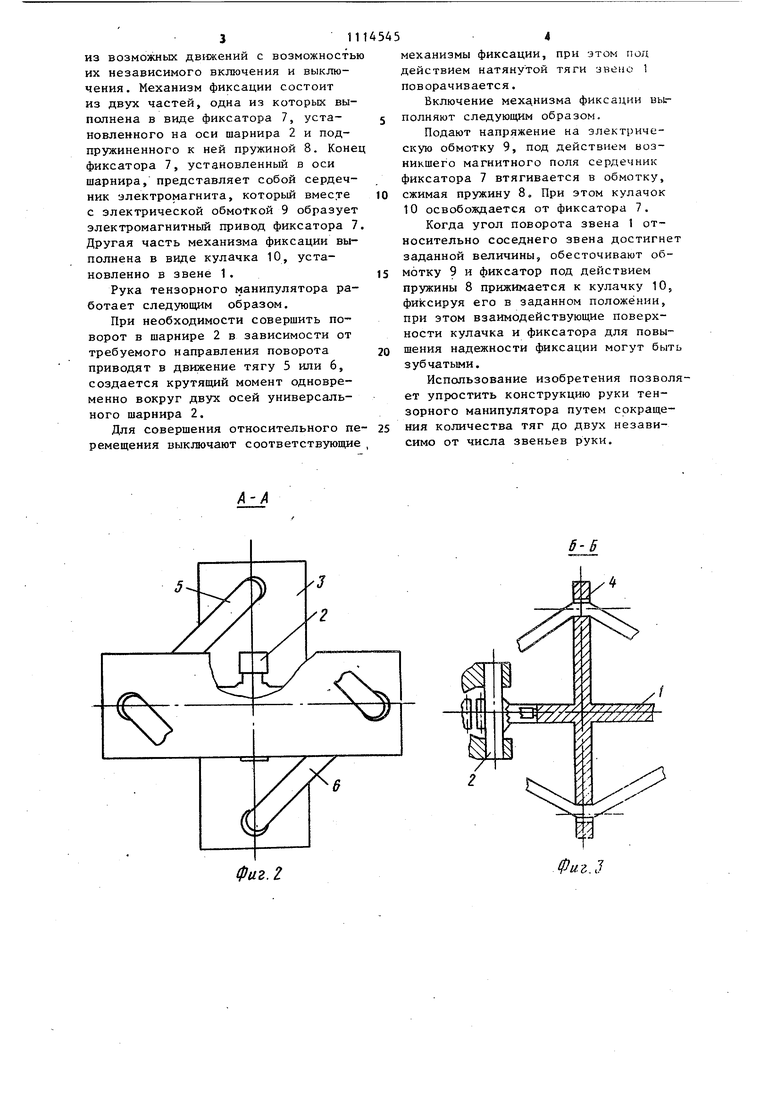
i1 Изобретение относится к робототехнике и предназначено для использования в роботах с большой степень подвижности. Известен манипулятор с тензорной рукой, содержащий ряд звеньев, соединенных меяду собой посредством универсальных шарниров, обеспечивающих их поворот относительно друг друга. На звеньях установлены пластины в которых выполнены ориентированные отверстия, сквозь которые свободно проходят тяги. При этом тяга, приводящая в движение первую со стороны схвата пластину, закреплена на руке перед первым шарниром со стороны схвата, следующая тяга закреплена неподвижно на последующей за первым шарниром пластине со стороны схвата и свободно пропущена через отверстия в пластинах, расположенных между приводом и пластиной, к которой прикреплена тяга. Аналогично прикреплены к каждой пластине по четыре индивидуальные тяги, свободно проходящие в предыдущих пластинах и обеспечивающие поворот в универсальном шарнире, перед которым находится данная плас тина. При натяжении одной из поворачивается пластина, к которой прикреплена данная тяга. Остальные пластины при этом остаются неподвиж ньми 11. Недостатком данной конструкции является ее сложность. Для обеспечения большого числа степеней подвижности требуется количество тяг, в два раза превьшающее количество степени подвижности тензорной руки. Причем, с увеличением количества степеней подвижност манипулятора увеличиваются габариты пластин, иначе невозможно будет пропустить большое количество тяг через пластину. Увеличение габаритов каждой плас тины ведет к уменьшению возможного угла поворота в каждом шарнире. Поэтому для обеспечения заданного угл поворота всей руки требуется увеличить число шарниров, что ведет к дальнейшему усложнению руки. Кроме того, при работе тяги, не участвую1цие п лакньш момент в передаче днижеиич пластинам, но проходя щие через поворачивающуюся пластину, жолжны получать изменение в длине пропорционально углу поворота пластины, приводимой в движение, что усложняет конструкцию привода и системы управления. Наличие самост оятельных движений каждой тяги, кроме того, требует индивидуального привода к каждой поворачиваемой пластине, поэтому при большом числе гюворачиваемых пластин габариты и конструкции привода усложняются. Целью изобретения является упрощение конструкции руки тензорного манипулятора. Поставленная цель достигается тем, что рука тензорного манипулятора, содержащая ряд соединенных между собой универсальными шарнирами звеньев с поперечными пластинами, в которых симметрично относительно оси звеньев выпо1;(нены два отверстия для прохода тяг, закрепленных на руке перед первым шарниром со стороны захвата, снабжена механизмами фиксации звеньев относительно осей шарниров, при этом каждый механизм фиксации снабжен приводом и состоит из двух частей, одна из которых установлена на шарнире, а другая - на звене, а отверстия в пластинах соседних звеньев повернуты .относительно друг друга на 90. На фиг. 1 изображена рука тензорного манипулятора; общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - разрез В-В на фиг. 1. Рука тензорного манипулятора содержит звенья 1, соединенные между собой посредством универсальных шарниров 2. Каждое звено имеет поперечную пластину 3, в которой выполнены два отверстия .4, расположенные симметрично относительно оси звеньев, при этом отверстия 4 в пластинах 3 соседних звеньев 1 повернуты относительно друг друга на 90°. Тяги 5 и 6, свободно проходящие через отверстия 4 во вс.ех пластинах руки, неподвижно закреплены на ней перед первым шарниром со стороны схвата (не показан). Кроме того, рука снабжена механизмами фиксации звеньев 1 относительно осей шарниров 2 по каждому
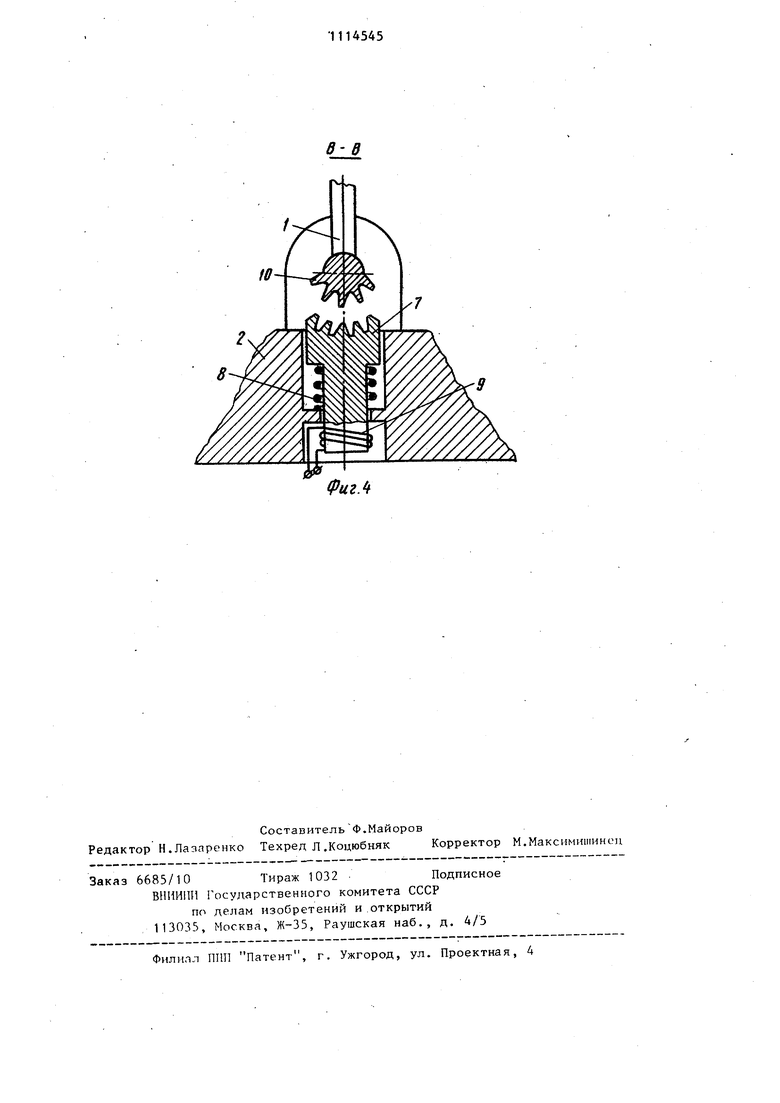
из возможных движений с возможностью их независимого включения и выключения. Механизм фиксации состоит из двух частей, одна из которых выполнена в виде фиксатора 7, установленного на оси шарнира 2 и подпружиненного к ней пружиной 8. Конец фиксатора 7, установленный в оси шарнира, представляет собой сердечник электромагнита, который вместе с электрической обмоткой 9 образует электромагнитный привод фиксатора 7. Другая часть механизма фиксации выполнена в виде кулачка 10, установленно в звене 1.
Рука тензорного манипулятора работает следующим образом.
При необходимости совершить поворот в шарнире 2 в зависимости от требуемого направления поворота приводят в движение тягу 5 или 6, создается крутящий момент одновременно вокруг двух осей универсального шарнира 2.
Для совершения относительного перемещения выключают соответствующие
механизмы фиксации, при этом под действием натянутой тяги звено 1 поворачивается.
Включение механизма фиксации выполняют следующим образом.
Подают напряжение на электрическую обмотку 9, под действием возникшего магнитного поля сердечник фиксатора 7 втягивается в обмотку, сжимая пружину 8. При этом кулачок 10 освобождается от фиксатора 7.
Когда угол поворота звена 1 относительно соседнего звена достигне заданной величины, обесточивают обмотку 9 и фиксатор под действием пружины 8 прижимается к кулачку 10, фиксируя его в заданном положении, при этом взаимодействующие поверхности кулачка и фиксатора для повышения надежности фиксации могут быт зубчатыми.
Использование изобретения позволет уп1юстить конструкцию руки тензорного манипулятора путем сокращения количества тяг до двух независимо от числа звеньев руки.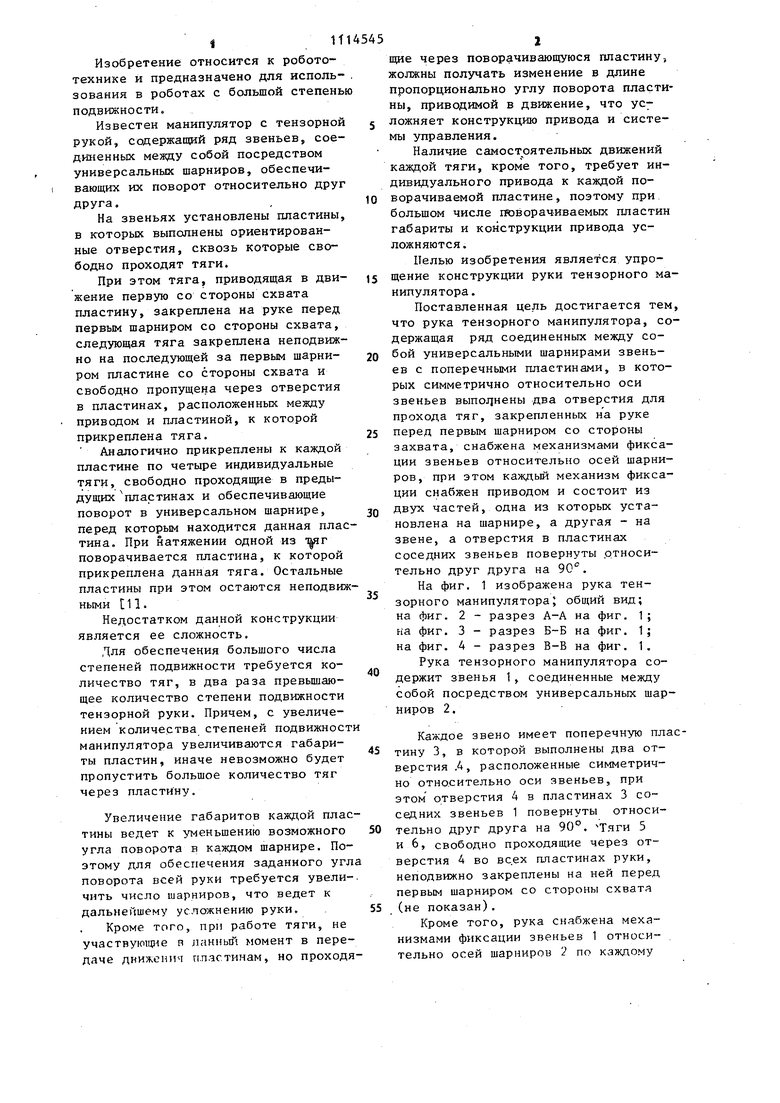
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука тензорного манипулятора | 1984 |
|
SU1202851A1 |
| Рука манипулятора | 1985 |
|
SU1291382A1 |
| МАНИПУЛЯТОР | 2003 |
|
RU2247648C1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| Рука манипулятора | 1984 |
|
SU1332690A1 |
| Задающий механизм манипулятора | 1972 |
|
SU547337A1 |
| Манипулятор модульного типа | 1987 |
|
SU1435422A1 |
| МАНИПУЛЯТОР | 1970 |
|
SU271252A1 |
| Рука манипулятора | 1984 |
|
SU1283077A1 |
| Устройство для навески поворотно-откидной створки | 1979 |
|
SU866088A1 |
РУКА ТЕНЗОРНОГО МАНИПУЛЯТОРА, содержащая ряд соединенных между собой универсальными шарнирами звеньев с поперечными пластинами, в которых симметрично относительно оси звеньев выполнены два отверстия для прохода -тяг, закрепленных на руке перед первым шарниром со стороны схвата ,, отличающаяся тем, что, с целью упрощения конструкции, она снабжена механизмами фиксации звеньев относительно осей шарниров, при этом каждый механизм фиксации снабжен приводом и состоит из двух частей-, одна- из которых установлена на шарнире, а другая - на звене, а отверстия в пластинах соседних звеньев повернуты относительно друг друга на 90°.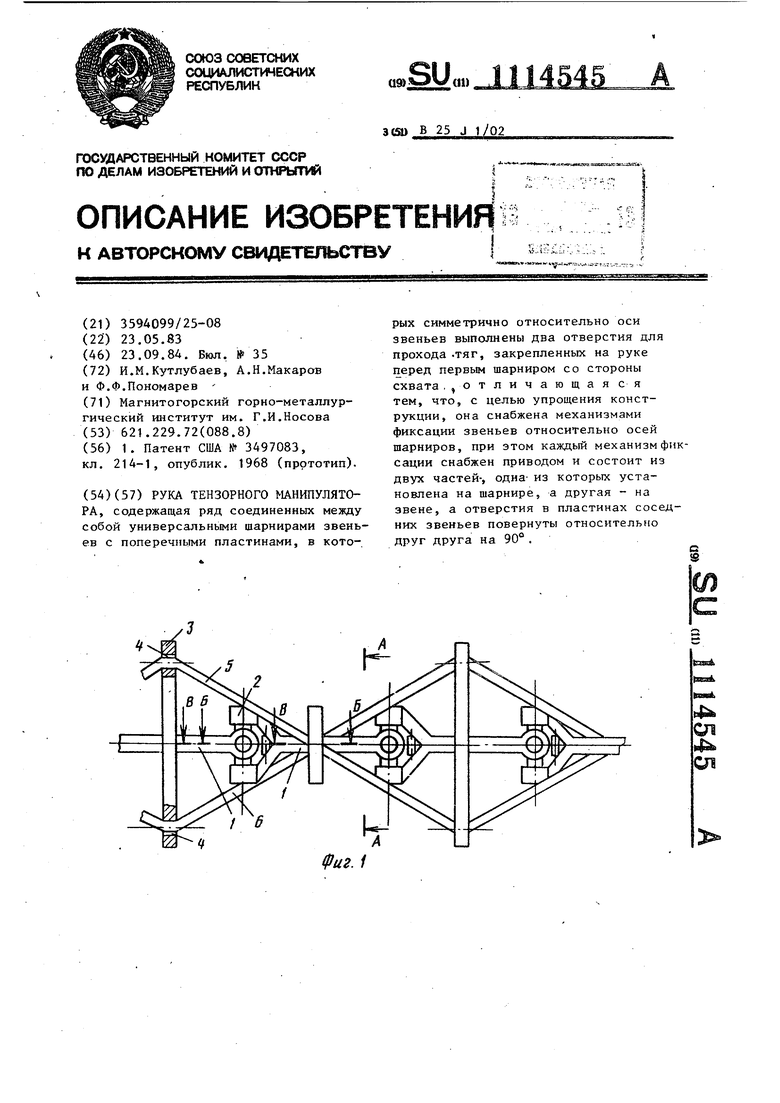
фиг. 2
S-B
Фиг.:
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США № 3497083, кл | |||
| Устройство для вытяжки и скручивания ровницы | 1923 |
|
SU214A1 |
| Приспособление для контроля движения | 1921 |
|
SU1968A1 |
