fO
15
Изобретение относится к подтип- - никовой промьппленности и преимущественно может быть использовано для регулирования натяга шариколодшипни-; ковых узлов электродвигателей.
Цель изобретения - расширение функциональных возможностей устройства.
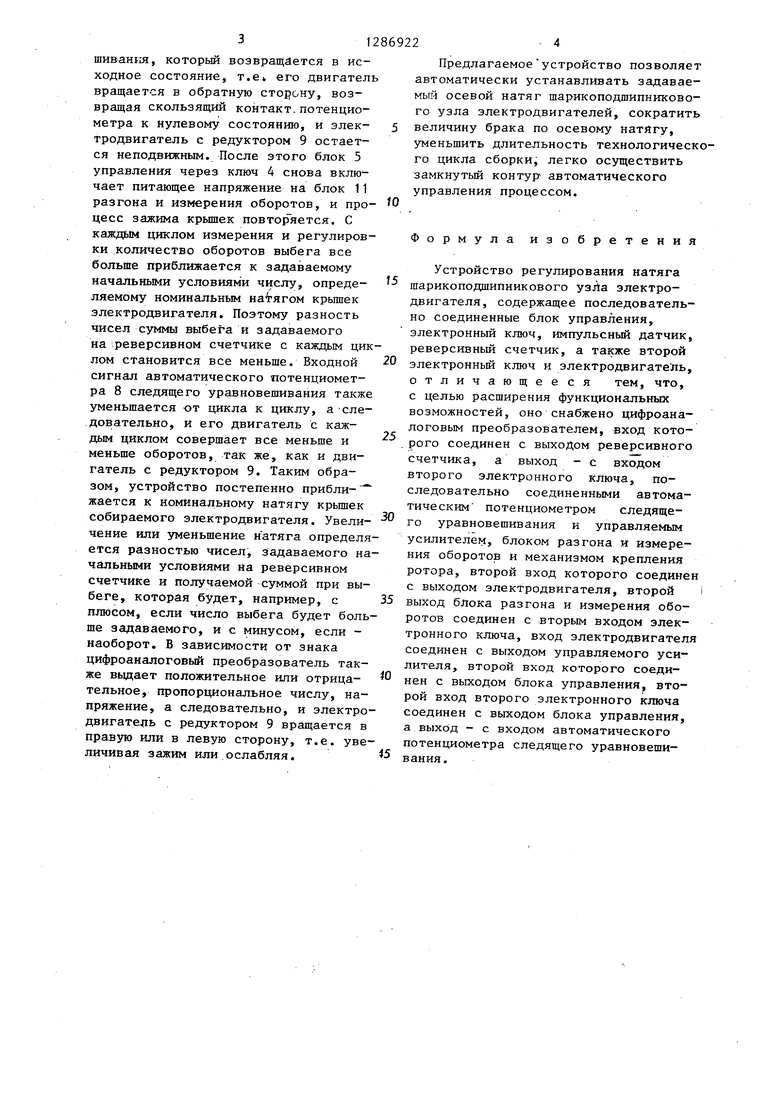
На фиг. 1 изображена блок-схема устройства; на фиг. 2 - блоки разгона и измерения оборотов механизма ,крепления и электродвигателя с редуктором.
Устройство содержит цифроаналого- вый преобразователь 1 (ЦАП). Вход ЦАП соединен с выходом реверсивного счетчика 2, вход реверсивного счетчика соединен с выходом импульсного датчика 3. Последний состоит из усилителя-ограничителя и формирователя импульса запуска для реверсивного счетчика 2 при поступлении сигнала на его вход и импульса окончания поступления сигнала. Вход импульсного датчика 3 соединен с выходом электронного ключа 4, соединенного по перво- -му входу с первым выходом блока 5 управления. Второй выход блока 5 управления соединен с вторым входом JQ электронного ключа 6 и первым входом управляемого усилителя 7. Автоматический потенциометр 8 следящего уравновешивания по входу соединён с ключом 6, а по выходу - с вторым входом управляемого усилителя 7. Три блока: электродвигатель с редуктором 9, механизм 10 крепления ротора собираемого электродвигателя и блок 11 разгона и измерения оборотов представляют собой единый узел.
На общей раме с одной стороны закреплен постоянно один из держателей
20
25
35
40
ния оборотов соединен с вторым входом электронного ключа 4.
Устройство работает следующим образом.
Блок 5 управления включает через ключ 4 на вход блока 11 разгона и измерения оборотов напряжение питания, одновременно закрывает входы управляемого усилителя 7 и автоматического потенциометра 8 следящего уравновешивания через ключ 6. По истечении времени t установления номинальной скорости вращения блока 11 разгона и измерения оборотов блок 5 управления переключает ключом 4 сигнал выхода блока 11 разгона и из-, мерения оборотов на вход импульсного датчика- 3, который запускает реверсивный счетчик 2, а по окончании поступления сигнала с блока 11 разгона и измерения оборотов выдает импульс блоку 5 управления, по которому он снимает блокировк с управляемого усилителя 7 и автоматического потенциометра 8 следящего уравновешивания через электронный ключ 6. Цифроана- логовый преобразователь 1 преобразует показание реверсивного счетчика 2 в постоянное напряжение, которое поступает через электронный ключ 6 на вход автоматического потенциометра 8. Реверсивный двигатель автоматического потенциометра 8 следящего уравновешивания, производя уравновешивание входного сигнала, вращается, при этом такое же количество оборотов делает и электродвитель с редуктором 9, питаемый управляемым усилителем 7, подключенным по входу параллельно к усилителю автоматического потенциометра 8 следящего уравновешивания. Электродвигатель с редуктором 9, вращаясь, зажимает крьш1ки ротора элек12 крьш1ек ротора собираемого электро-,5 тродвигателя, стоящего в механизме 10
двигателя, второй держатель 13 подвижно соединен с выходом редуктора 9 электродвигателя, закрепленного жестко на раме 14. Блок 11 разгона и измерения оборотов представляет собой синхронный электродвигатель, статор 15 которого неподвижно установлен относительно рамы 14 механизма 10 крепления, а ротор 16 блока 11 разгона жестко соединен с осью статора собираемого электродвигателя. Вход электродвигателя с редуктором 9 соединен с выходом управляемого усилителя 7, а вход блока разгона и измере50
55
крепления. По окончании процесса уравновешивания двигатель автоматического потенциометра 8 останавливается, одновременно останавливается и двигатель с редуктором 9, так как сигнал, поступающий на управляемый усилитель 7, снимается с входа усилителя автоматического потенциометра 8 и будет равен нулю при наступлении уравновешивания. Блок управления после этого снова блокирует входы управляемого усилителя 7 и через ключ 6 - вход автоматического потенциометра 8 следящего уравнове
5
Q
0
5
5
0
ния оборотов соединен с вторым входом электронного ключа 4.
Устройство работает следующим образом.
Блок 5 управления включает через ключ 4 на вход блока 11 разгона и измерения оборотов напряжение питания, одновременно закрывает входы управляемого усилителя 7 и автоматического потенциометра 8 следящего уравновешивания через ключ 6. По истечении времени t установления номинальной скорости вращения блока 11 разгона и измерения оборотов блок 5 управления переключает ключом 4 сигнал выхода блока 11 разгона и из-, мерения оборотов на вход импульсного датчика- 3, который запускает реверсивный счетчик 2, а по окончании поступления сигнала с блока 11 разгона и измерения оборотов выдает импульс блоку 5 управления, по которому он снимает блокировк с управляемого усилителя 7 и автоматического потенциометра 8 следящего уравновешивания через электронный ключ 6. Цифроана- логовый преобразователь 1 преобразует показание реверсивного счетчика 2 в постоянное напряжение, которое поступает через электронный ключ 6 на вход автоматического потенциометра 8. Реверсивный двигатель автоматического потенциометра 8 следящего уравновешивания, производя уравновешивание входного сигнала, вращается, при этом такое же количество оборотов делает и электродвитель с редуктором 9, питаемый управляемым усилителем 7, подключенным по входу параллельно к усилителю автоматического потенциометра 8 следящего уравновешивания. Электродвигатель с редуктором 9, вращаясь, зажимает крьш1ки ротора электродвигателя, стоящего в механизме 10
крепления. По окончании процесса уравновешивания двигатель автоматического потенциометра 8 останавливается, одновременно останавливается и двигатель с редуктором 9, так как сигнал, поступающий на управляемый усилитель 7, снимается с входа усилителя автоматического потенциометра 8 и будет равен нулю при наступлении уравновешивания. Блок управления после этого снова блокирует входы управляемого усилителя 7 и через ключ 6 - вход автоматического потенциометра 8 следящего уравнове
шиванкя, который возвращается в исходное состояние, т.е его двигатель вращается в обратную сторону, возвращая скользящий контакт.потенциометра к нулевому состоянию, и электродвигатель с редуктором 9 остается неподвижным. После этого блок 5 управления через ключ 4 снова включает питающее напряжение на блок 11 разгона и измерения оборотов, и процесс зажима крьшек повторяется. С каждьм циклом измерения и регулировки количество оборотов выбега все больше приближается к задаваемому начальными условиями числу, определяемому номинальным на -ягом крьшек электродвигателя. Поэтому разность чисел суммы выбега и задаваемого на реверсивном счетчике с каждым циклом становится все меньше. Входной сигнал автоматического потенциометра 8 следящего уравновешивания также уменьшается от цикла к циклу, а следовательно, и его двигатель с каждым циклом совершает все меньше и меньше оборотов, так же, как и двигатель с редуктором 9. Таким образом, устройство постепенно прибли- жается к номинальному натягу крьш1ек собираемого электродвигателя. Увеличение или уменьшение натяга определяется разностью чисел, задаваемого начальными условиями на реверсивном счетчике и получаемой суммой при выбеге, которая будет, например, с плюсом, если число выбега будет больше задаваемого, и с минусом, если - наоборот. В зависимости от знака цифроаналоговый преобразователь также вьщает положительное или отрицательное, пропорциональное числу, напряжение, а следовательно, и электродвигатель с редуктором 9 вращается в правую или в левую сторону, т.е. увеличивая зажим или ослабляя.
,-
w
2035
69224
Предлагаемое устройство позволяет автоматически устанавливать задаваемый осевой натяг шарикоподшипникового узла электродвигателей, сократить величину брака по осевому натягу, уменьшить длительность технологического цикла сборки, легко осуществить замкнутый контур автоматического управления процессом.
f5
2035
25
30
Ю
Формула изобретения
Устройство регулирования натяга шарикоподшипникового узАа электродвигателя, содержащее последовательно соединенные блок управления, электронный ключ, импульсный датчик, реверсивный счетчик, а также второй электронный ключ и электродвигатель, отличающееся тем, что, с целью расширения функциональных возможностей, оно снабжено цифроана- логовым преобразователем, вход которого соединен с выходом реверсивного счетчика, а выход - с входом второго электронного ключа, последовательно соединенными автоматическим потенциометром следящего уравновешивания и управляемым усилителем, блоком разгона и измерения оборотов и механизмом крепления ротора, второй вход которого соединен с выходом электродвигателя, второй i выход блока разгона и измерения оборотов соединен с вторым входом электронного ключа, вход электродвигателя соединен с выходом управляемого усилителя, второй вход которого соединен с выходом блока управления, второй вход второго электронного ключа соединен с выходом блока управления, а выход - с входом автоматического потенциометра следящего уравновешивания.
12 13
/
т
Составитель Т. Хромова Редактор Е. Копча Техред л.Олейник Корректор М.
Заказ 7703/40 Тираж 776Подписное
ВНИШШ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
03иг.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения времени выбега электродвигателя | 1983 |
|
SU1117543A1 |
| ВРАЩАЮЩИЙСЯ СНАРЯД С ЭЛЕКТРИЧЕСКИМ РУЛЕВЫМ ПРИВОДОМ | 2005 |
|
RU2285227C1 |
| ТОПЛИВОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО ТРАНСПОРТНОГО СРЕДСТВА | 1990 |
|
RU2081398C1 |
| Программное устройство для системы автоматического разворота турбогенератора | 1972 |
|
SU450135A1 |
| Устройство для определения времени разгона и выбега гиродвигателя | 1979 |
|
SU783588A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ВРАЩАЮЩИХСЯ УЗЛОВ СЧЕТЧИКОВ ВОДЫ С КРЫЛЬЧАТКОЙ, МАГНИТНО-СВЯЗАННОЙ С ИНДИКАТОРНЫМ ПРИБОРОМ, В РЕЖИМЕ ВЫБЕГА С ЗАДАННОЙ НАЧАЛЬНОЙ СКОРОСТЬЮ | 2003 |
|
RU2251666C2 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МАГИСТРАЛЬНЫМ ЭЛЕКТРОВОЗОМ | 1966 |
|
SU187079A1 |
| Следящая система | 1985 |
|
SU1290251A1 |
| Устройство автоматического управления электроприводом центрифуги | 1987 |
|
SU1618451A1 |
| Способ автоматического управления электроприводом центрифуги и устройство для его осуществления | 1984 |
|
SU1292842A1 |
Изобретение относится к электротехнической промьшшенности и может быть преимущественно использовано для сборки роторов в подшипниках качения электродвигателей. Целью изобретения является расширение функциональных возможностей.. Блок управления (БУ) 5 включает напряжение питания, одновременно закрывает входы усилителя 7 и автоматического потенциометра (АП) 8 через ключ 6. По истечении времени установления номинальной скорости вращения блока разгона и измерения оборотов 11 БУ 5 переключает выход этого блока на вход импульсного датчика 3, который запускает реверсивный счетчик 2. По окончании поступления сигнала с блока разгона 11 выдается импульс БУ 5. Цифроаналоговый преобразователь 1 преобразует показание счетчика 2 в постоянное напряжение, кото- pqe поступает на вход АЛ 8, реверсивный двигатель вращается в процессе уравновешивания. Электродвигатель с редуктором 9, вращаясь с тем же числом оборотов, зажимает крышки ротора с помощью механизма крепления 10. По окончании самоуравновешивания АП 8 его реверсивный двигатель останавливается. Одновременно останавливается и двигатель с редуктором 9. Указанные операции повторяют до тех пор, пока разность чисел оборотов при самоторможении и заданных становится равной нулю. 2 ил. (Л N9 00 Од со to 1C (pt/e./
| Стабилизатор напряжения постоянного тока | 1973 |
|
SU570888A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
