Изобретение относится к устройствам управления позиционными приводами и к дискретным следящим системам.
Известные устройства для позиционного управления приводом, содерл ащие элемент задания места остановки, датчик фактического положения привода, блок слежения и исполнительный орган, довольно сложны и не обеспечивают достаточной точности выполнения задаваемых перемещений из-за наличия зоны нечувствительности, а также автоматического выбора направления движения привода.
Предлагаемое устройство не имеет этих недостатков и отличается от известных тем, что элемент задания места остановки выполнен в виде позиционного распределителя, выходы позиций которого электрически соединены с выходами позиций датчика фактического положения привода со сдвигом на одну позицию для одного направления и на минус одну позицию для другого направления, причем между указанными соединениями выходов включены цепи выпрямителей с взаимно противоположной полярностью для каждого из направлений движения, а блок слежения образован разделительными выпрямителями.
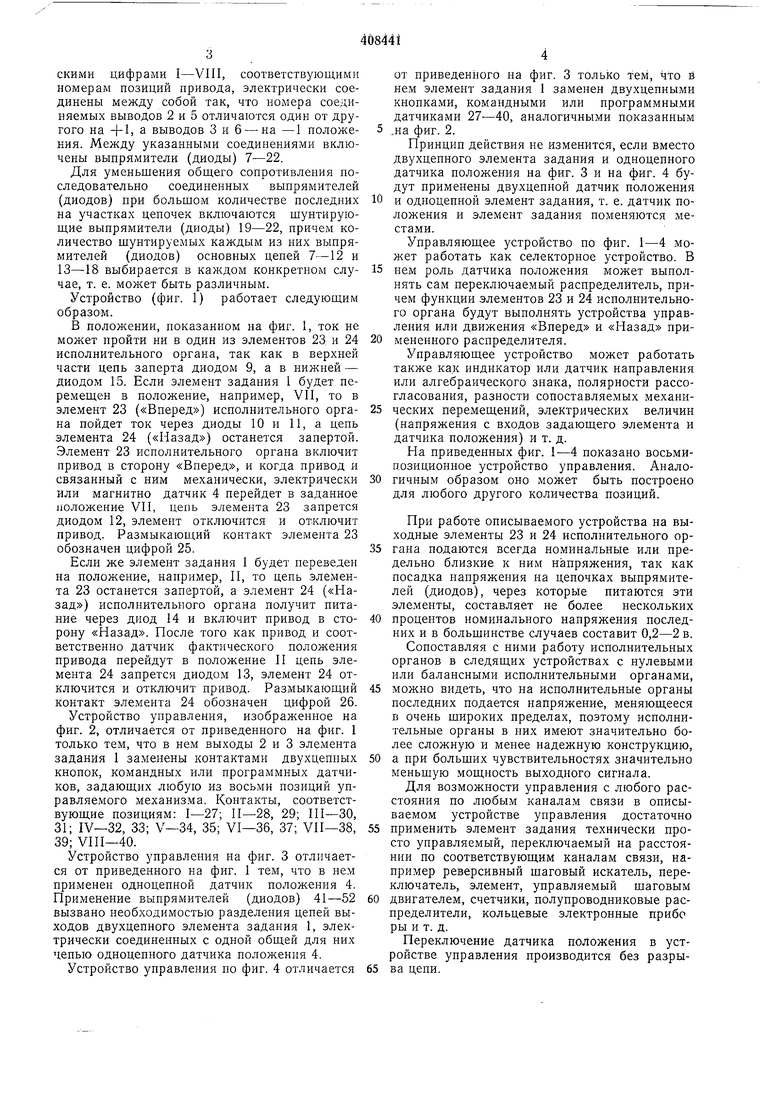
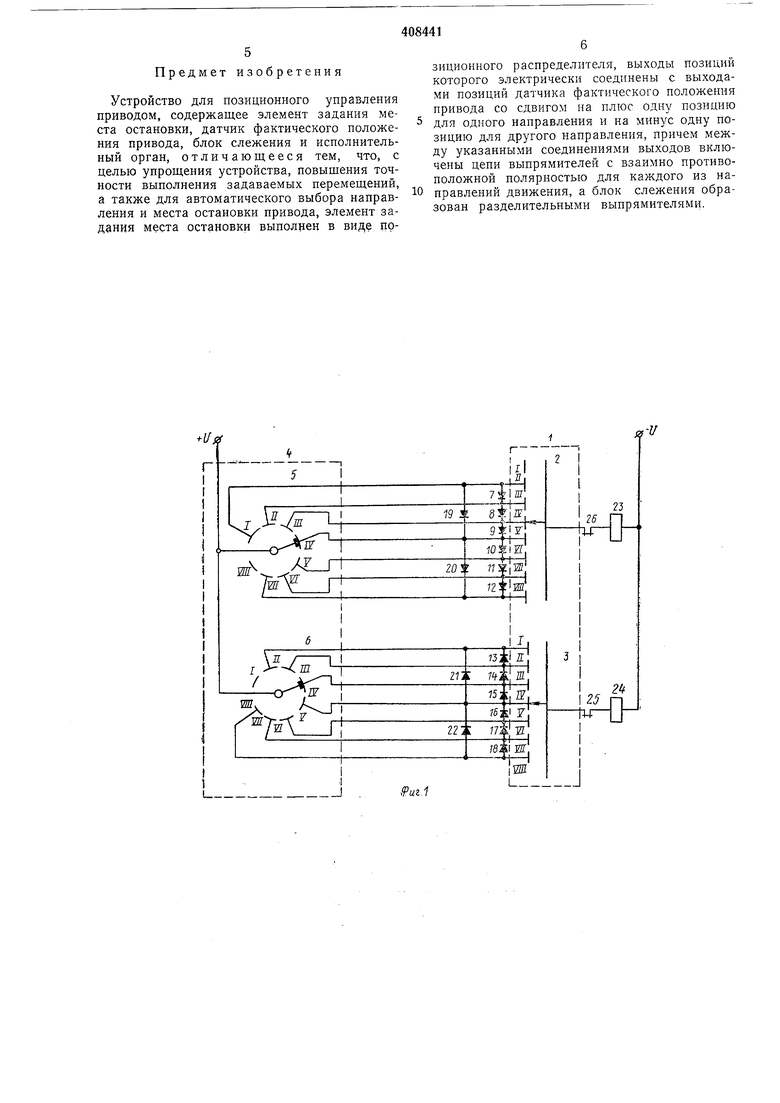
На фиг. 1 показа.но предлагаемое устройство, в котором в качестве элемента задания применен двухцепной многонозиционный переключающий элемент; на фиг. 2 - устройство,
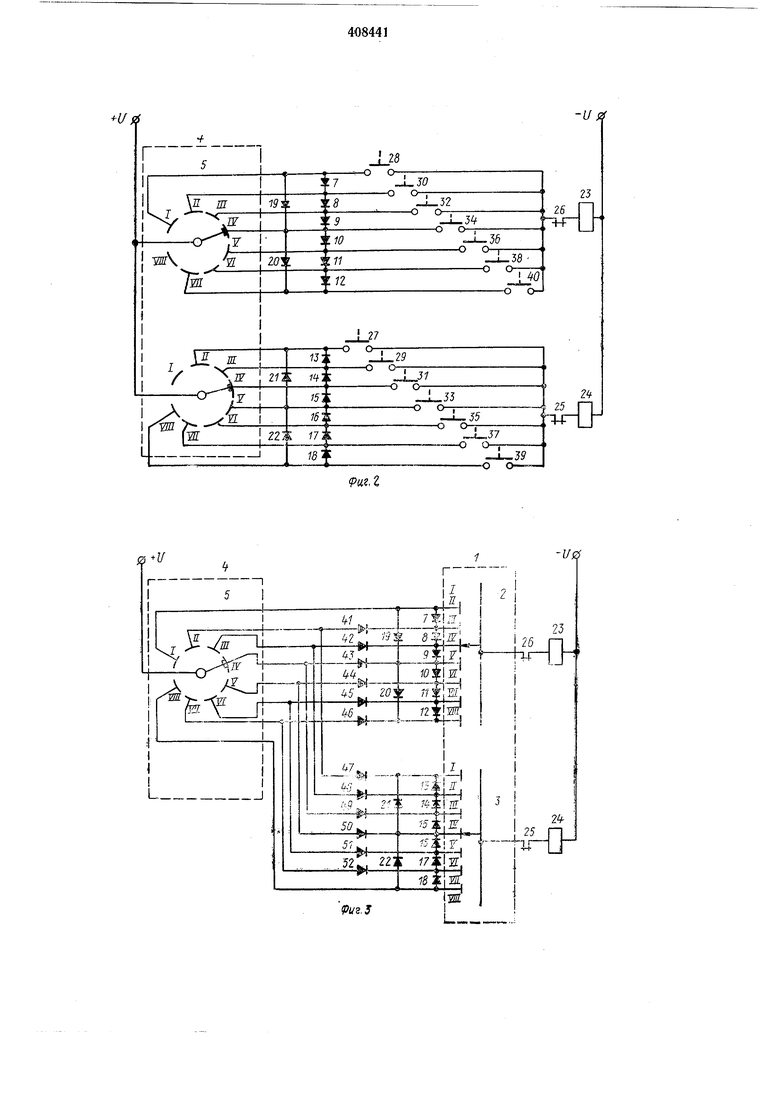
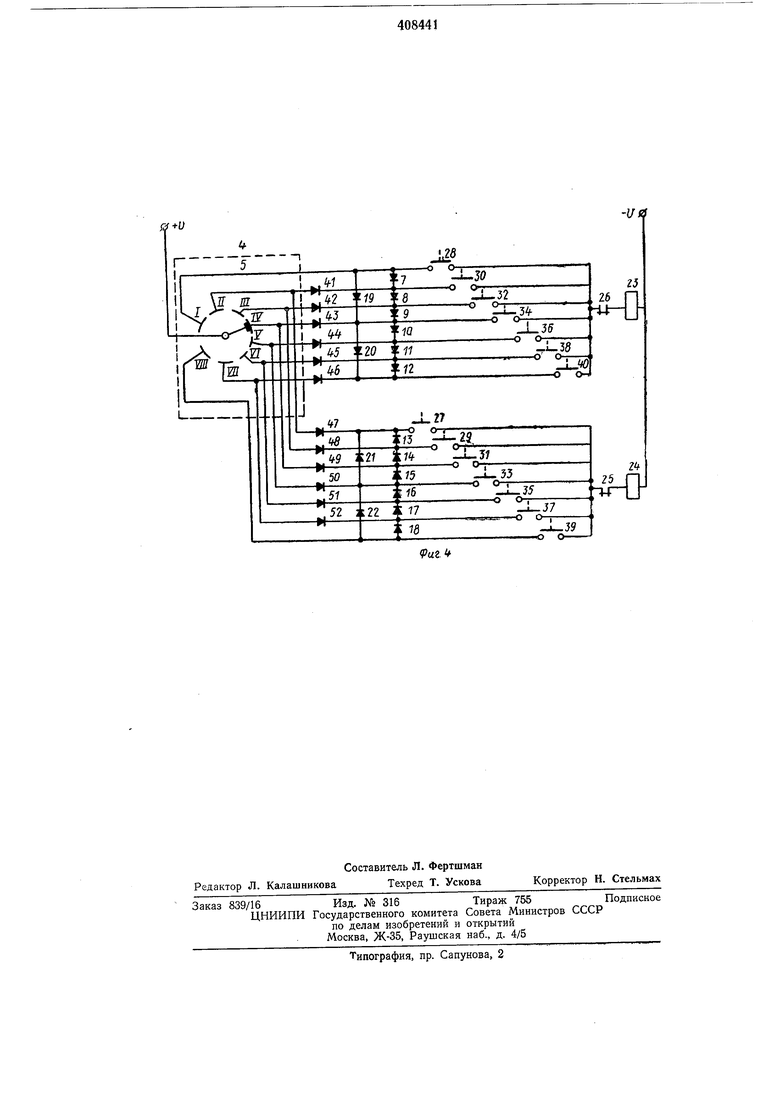
в котором в качестве элемента задания применен комплект двухцепных кнопок управления, технологических или программных датчиков; на фиг. 3 - устройство, в котором в качестве датчика положения применен одноцепной многопозиционный переключающий элемент; на фиг. 4 - устройство, в котором в качестве элемента задания применен комплект одноценных кнопок управления, технологических или программных датчиков.
Управляющее устройство состоит из элемента задания 1 с контактными платами 2 и 3 (вместо него может работать другой контактный или бесконтактный элемент, выполняющий функции переключателя, распределителя), датчика фактического положения 4 с двумя контактными платами 5 и 6 (в его роли могут использоваться переключатель, механически связанный с приводом, путевые переключатели, щеточные путевые контакты, реверсивные искатели, управляемые импульсами датчика путевых импульсов, герконы и др.), диодного блока слежения 7-22 и исполнительного органа из элементов 23 и 24. Роль
последних могут исполнять контактные или
бесконтактные элементы релейного действия:
два двухнозиционных или один трехпозиционный.
Выходы элемента задания и выходы датчика фактического положения обозначены римскими цифрами I-VIII, соответствующими номерам позиций привода, электрически соединены между собой так, что номера соединяемых выводов 2 и 5 отличаются один от другого на +1. а выводов 3 и 6 - на -1 положения. Между указанными соединениями включены выпрямители (диоды) 7-22. Для уменьшения общего сопротивления последовательно соединенных выпрямителей (диодов) при большом количестве последних на участках цепочек включаются шунтирующие выпрямители (диоды) 19-22, причем количество шунтируемых каждым из них выпрямителей (диодов) основных цепей 7-12 и 13-18 выбирается в каждом конкретном случае, т. е. может быть различным. Устройство (фиг. 1) работает следующим образом. В положении, показанном иа фиг. 1, ток не может пройти ни в один из элементов 23 и 24 исполнительного органа, так как в верхней части цепь заперта диодом 9, а в нижней - диодом 15. Если элемент задания 1 будет перемещен в положение, например, VII, то в элемент 23 («Вперед) исполнительного органа пойдет ток через диоды 10 и 11, а цепь элемента 24 («Назад) останется запертой. Элемент 23 исполнительного органа включит привод в сторону «Вперед, и когда привод и связанный с ним механически, электрически или магнитно датчик 4 перейдет в заданное положение VII, цепь элемента 23 запрется диодом 12, элемент отключится и отключит привод. Размыкающий контакт элемента 23 обозначен цифрой 25. Если же элемент задания 1 будет переведен на положение, например, II, то цепь элемента 23 останется запертой, а элемент 24 («Назад) исполнительного органа получит питание через диод 14 и включит привод в сторону «Назад. После того как привод и соответственно датчик фактического положения привода перейдут в положение II цепь элемента 24 запрется диодом 13, элемент 24 отключится и отключит привод. Размыкающий контакт элемента 24 обозначен цифрой 26. Устройство управления, изобрал епное на фиг. 2, отличается от приведенного на фиг. 1 только тем, что в нем выходы 2 и 3 элемента задания 1 заменены контактами двухцепных кнопок, командных или программных датчиков, задающих любую из восьми позиций управляемого механизма. Контакты, соответствующие позициям: 1-27; 11-28, 29; III-30, 31; IV-32, 33; V-34, 35; VI-36, 37; VII-38, 39; VIII-40. Устройство управления на фиг. 3 отличается от приведенного на фиг. 1 тем, что в нем применен одноцепной датчик положения 4. Применение выпрямителей (диодов) 41-52 вызвано необходимостью разделения цепей выходов двухцепного элемента задания 1, электрически соединенных с одной общей для них цепью одноценного датчика положения 4. Устройство управления по фиг. 4 отличается от приведенного на фиг. 3 только тем, что в нем элемент задания 1 заменен двухцепными кнопками, командными или программными датчиками 27-40, аналогичными показанным на фиг. 2. Принцип действия не изменится, если вместо двухцепного элемента задания и одноцепного датчика положения на фиг. 3 и на фиг. 4 будут применены двухцепной датчик положения и одноцепной элемент задания, т. е. датчик ноложения и элемент задания поменяются местами. Управляющее устройство по фиг. 1-4 может работать как селекторное устройство. В нем роль датчика положения может выполнять сам переключаемый распределитель, причем функции элементов 23 и 24 исполнительного органа будут выполнять устройства управления или движения «Вперед и «Назад примененного распределителя. Управляющее устройство может работать также как индикатор или датчик направления или алгебраического знака, полярности рассогласования, разности сопоставляемых механических перемещений, электрических величин (напряжения с входов задающего элемента и датчика положения) и т. д. На приведенных фиг. 1-4 показано восьмипозиционное устройство управления. Аналогичным образом оно может быть построено для любого другого количества позиций. При работе описываемого устройства на выходные элементы 23 и 24 исполнительного органа подаются всегда номинальные или предельно близкие к ним напряжения, так как посадка напряжения на цепочках выпрямителей (диодов), через которые питаются эти элементы, составляет не более нескольких процентов номинального напряжения последних и в большинстве случаев составит 0,2-2 в. Сопоставляя с ними работу исполнительных органов в следящих устройствах с нулевыми или балансными исполнительными органами, можно видеть, что на исполнительные органы последних подается напряжение, меняющееся в очень широких пределах, поэтому исполнительные органы в них имеют значительно более сложную и менее надежную конструкцию, а при больших чувствительностях значительно меньшую мощность выходного сигнала. Для возможности управления с любого расстояния по любым каналам связи в описываемом устройстве управления достаточно применить элемент задания технически просто управляемый, переключаемый на расстоянии по соответствующим каналам связи, нанример реверсивный шаговый искатель, переключатель, элемент, управляемый шаговым двигателем, счетчики, полупроводниковые распределители, кольцевые электронные прибо ры и т. д. Переключение датчика положения в устройстве управления производится без разрыва цепи.
Предмет изобретения
Устройство для позиционного управления приводом, содержащее элемент задания места остановки, датчик фактического положения привода, блок слежения и исполнительный орган, отличающееся тем, что, с целью упрощения устройства, повышения точности выполнения задаваемых перемещений, а также для автоматического выбора направления и места остановки привода, элемент задания места остановки выполрен в виде цозиционного распределителя, выходы позиций которого электрически соединены с выходами позиций датчика фактического положения привода со сдвигом на плюс одну позицию для одного направления и на минус одну позицию для другого направления, причем между указанными соединениями выходов включены цепи выпрямителей с взаимно противоположной полярностью для каждого из направлений движения, а блок слежения образован разделительными выпрямителями.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для позиционного управления приводом перемещения объекта | 1975 |
|
SU570882A1 |
| УСТРОЙСТВО ДЛЯ ПОЗИЦИОННОГО УПРАВЛЕНИЯ ПРИВОДОМ | 1991 |
|
RU2024179C1 |
| Устройство для позиционного управления приводом | 1979 |
|
SU855906A1 |
| Устройство для позиционного управления приводом подъемника | 1976 |
|
SU667479A1 |
| Устройство для управления реверсивным электроприводом | 1981 |
|
SU993209A1 |
| Способ пуска частотно-управляемого асинхронного электродвигателя | 1988 |
|
SU1534738A2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ МЕХАНИЗМА ПОДЪЕМА И ОПУСКАНИЯ ГРУЗА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2309890C2 |
| Устройство для программного управ-лЕНия пЕРЕМЕщЕНиЕМ иСпОлНиТЕльНОгОэлЕМЕНТА | 1979 |
|
SU840806A1 |
| Позиционный регулятор | 1981 |
|
SU981959A1 |
| Гидравлическая рулевая машина | 1981 |
|
SU969594A1 |
SPuz.l
-U
I-
5
Pus. У
-U0
l 2
23
25
