К4Ј- V
О 00
Ьь
о ю го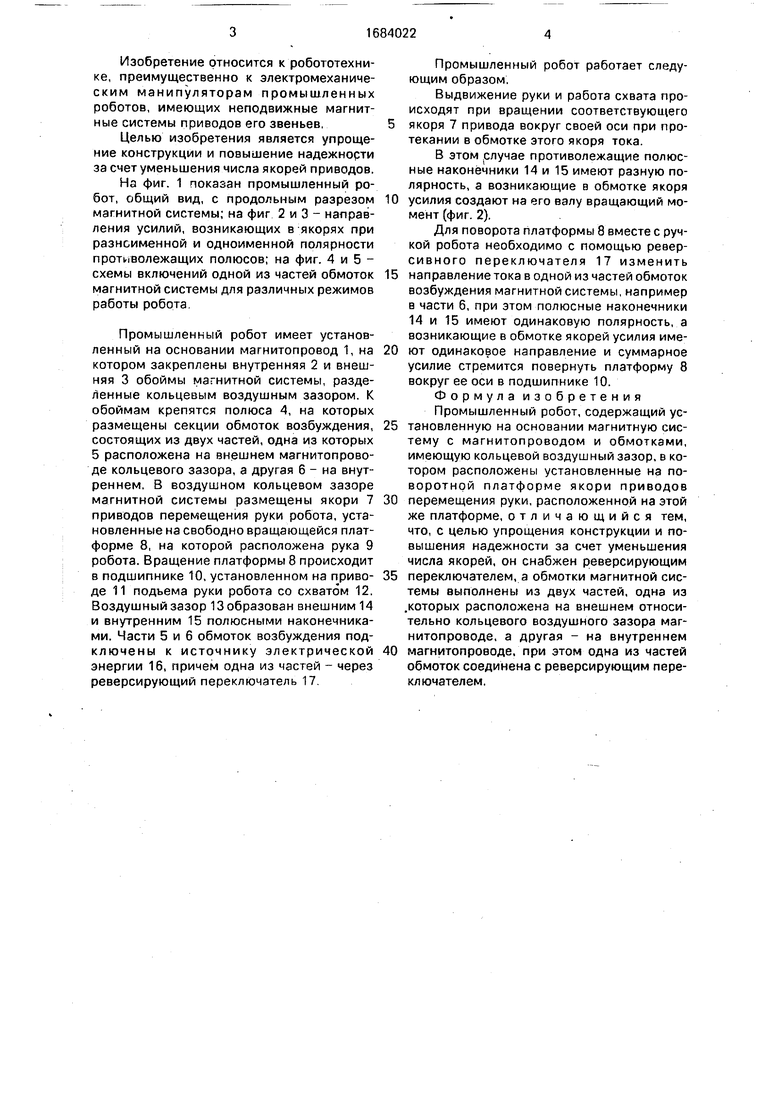
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 2015 |
|
RU2654096C2 |
| Промышленный робот | 1990 |
|
SU1729740A1 |
| Робот промышленный | 2014 |
|
RU2634392C2 |
| Промышленный робот | 1987 |
|
SU1426781A1 |
| Поворотный трансформаторный преобразователь | 1979 |
|
SU855751A1 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 2003 |
|
RU2248270C1 |
| МАГНИТНЫЙ ПРИВОД С ХОДОВЫМ ЯКОРЕМ В ВИДЕ ПОСТОЯННОГО МАГНИТА | 1990 |
|
RU2083013C1 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 2003 |
|
RU2247020C1 |
| Промышленный робот | 1990 |
|
SU1722810A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД | 1996 |
|
RU2098909C1 |
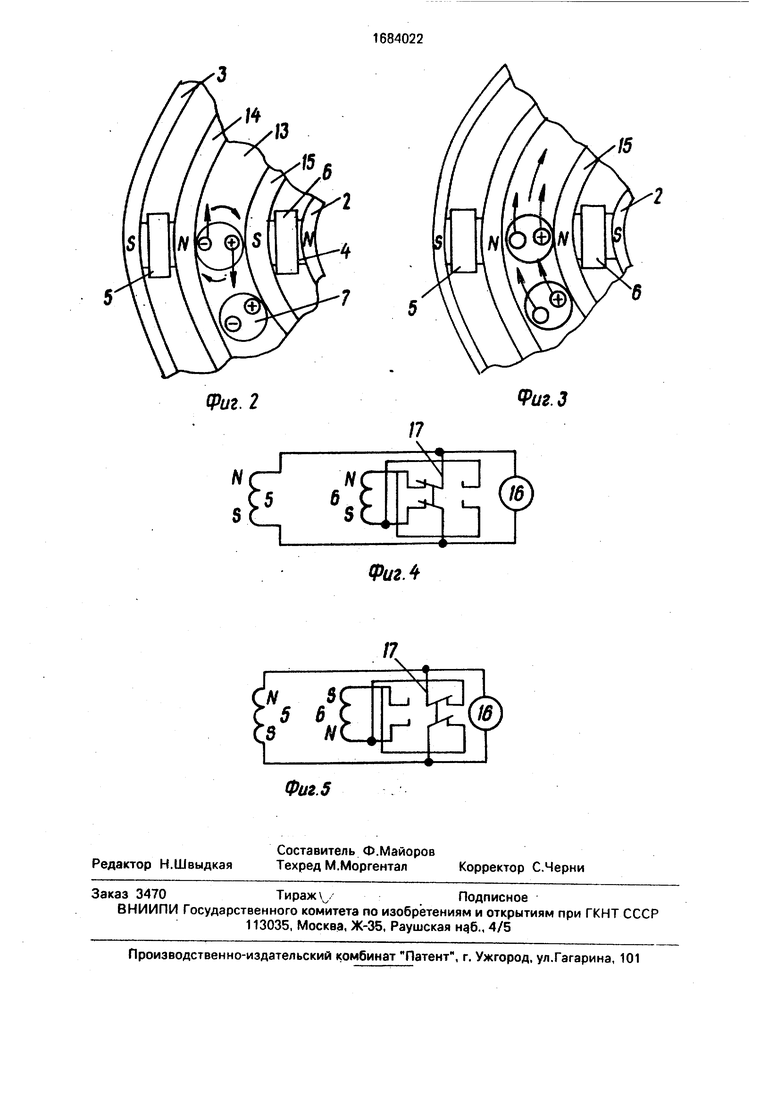
Изобретение относится к робототехнике, преимущественно к электромеханическим манипуляторам промышленных роботов, имеющих неподвижные магнитные системы приводов его звеньев. Целью изобретения является упрощение конструкции и повышение надежности за счет уменьшения числа якорей приводов. Для перемещения отдельных звеньев руки 9 робота к источнику электрической энергии подключается якорь соответствующего привода, находящийся в воздушном кольцевом зазоре магнитной системы. При этом полюса 4, расположенные по обе стороны этого зазора, имеют разноименную полярность, что приводит к возникновению на валу подключенного якоря вращающего момента. Для поворота всей руки 9 вместе с платформой 8 происходит переключение одной из обмоток 5, 6 таким образом, чтобы указанные полюса 4 стали одноименными, что приводит к возникновению на подключенных якорях усилия, создающего вращающий момент вокруг подшипника 10 платформы 8. 5 ил.ч ел
Фиг. I
Изобретение относится к робототехнике, преимущественно к электромеханическим манипуляторам промышленных роботов, имеющих неподвижные магнитные системы приводов его звеньев,
Целью изобретения является упрощение конструкции и повышение надежнорти за счет уменьшения числа якорей приводов.
На фиг. 1 показан промышленный робот, общий вид, с продольным разрезом магнитной системы; на фиг 2 и 3 - направления усилий, возникающих в якорях при разноименной и одноименной полярности противолежащих полюсов; на фиг. 4 и 5 - схемы включений одной из частей обмоток магнитной системы для различных режимов работы робота.
Промышленный робот имеет установленный на основании магнитопровод 1, на котором закреплены внутренняя 2 и внешняя 3 обоймы магнитной системы, разделенные кольцевым воздушным зазором. К обоймам крепятся полюса 4, на которых размещены секции обмоток возбуждения, состоящих из двух частей, одна из которых 5 расположена на внешнем магнитопрово- де кольцевого зазора, а другая 6 - на внутреннем. В воздушном кольцевом зазоре магнитной системы размещены якори 7 приводов перемещения руки робота, установленные на свободно вращающейся платформе 8, на которой расположена рука 9 робота. Вращение платформы 8 происходит в подшипнике 10, установленном на приводе 11 подъема руки робота со схватбм 12. Воздушный зазор 13 образован внешним 14 и внутренним 15 полюсными наконечниками. Части 5 и 6 обмоток возбуждения подключены к источнику электрической энергии 16, причем одна из частей - через реверсирующий переключатель 17.
Промышленный робот работает следующим образом.
Выдвижение руки и работа схвата происходят при вращении соответствующего
якоря 7 привода вокруг своей оси при протекании в обмотке этого якоря тока.
В этом случае противолежащие полюсные наконечники 14 и 15 имеют разную полярность, а возникающие в обмотке якоря
усилия создают на его валу вращающий момент (фиг. 2).
Для поворота платформы 8 вместе с ручкой робота необходимо с помощью реверсивного переключателя 17 изменить
направление тока в одной из частей обмоток возбуждения магнитной системы,например в части 6, при этом полюсные наконечники 14 и 15 имеют одинаковую полярность, а возникающие в обмотке якорей усилия имеют одинаковое направление и суммарное усилие стремится повернуть платформу 8 вокруг ее оси в подшипнике 10.
Формула изобретения Промышленный робот, содержащий установленную на основании магнитную систему с магнитопроводом и обмотками, имеющую кольцевой воздушный зазор, в котором расположены установленные на поворотной платформе якори приводов
перемещения руки, расположенной на этой же платформе, отличающийся тем, что, с целью упрощения конструкции и повышения надежности за счет уменьшения числа якорей, он снабжен реверсирующим
переключателем, а обмотки магнитной системы выполнены из двух частей, одна из .которых расположена на внешнем относительно кольцевого воздушного зазора маг- нитопроводе, а другая - на внутреннем
магнитопроводе, при этом одна из частей обмоток соединена с реверсирующим переключателем.
(Риг. 2
15
б
Фиг.З
Фиг А
| Промышленный робот | 1986 |
|
SU1342723A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
