f12
Изобретение относится к машиностроению, а именно к способам и средствам контроля зубчатых колес.
Цель изобретения - повьппение точности, уменьшение трудоемкости и расширения информативности при контроле гипоциклоидального колеса планетарной гидромашины путем измерения комплексного показателя точности.
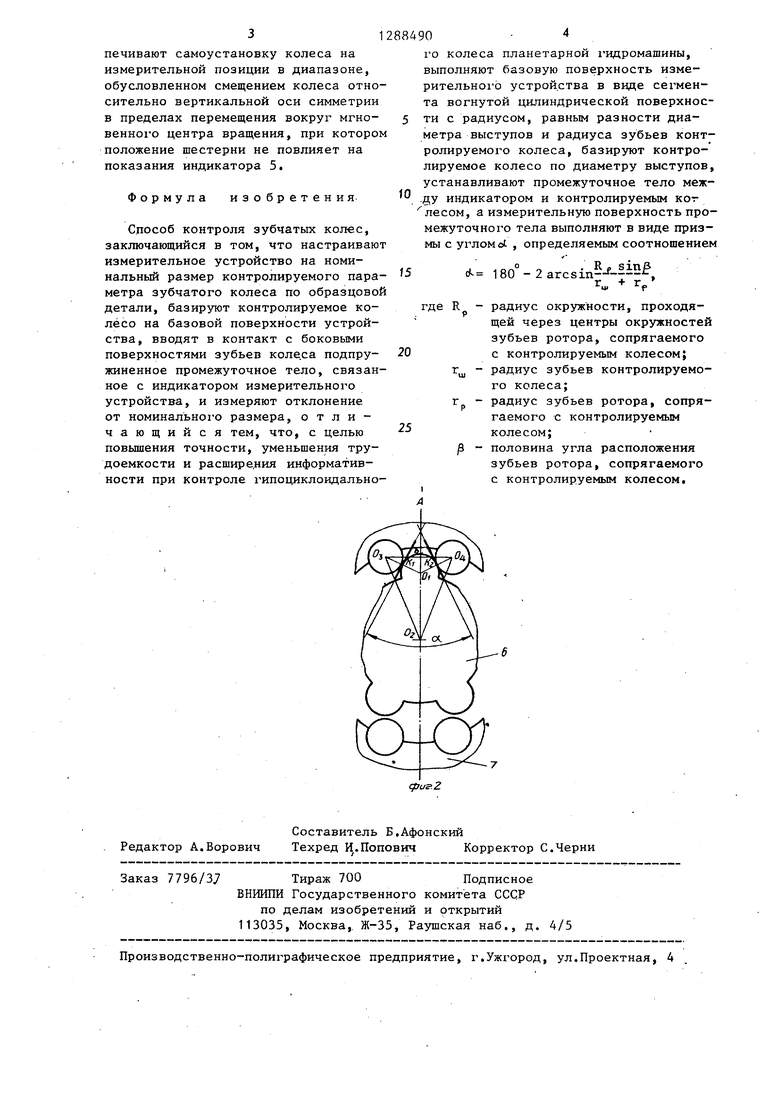
На фиг,1 изображена конструктивная схема измерительного устройства для реализации способа контроля гипоциклоидального колеса планетарной гидромашины; на фиг,2 - расчетная схема для определения угла призмы промежуточного тела.
Измерительное устройство для реализации способа включает в себя стол 1, приклеенную к нему стойку 2, промежуточное тело 3, пружину 4, индикатор 5, кинематически связанньй с промежуточным телом 3. Кроме того, на фиг.1 обозначено: позицией 6 - контролируемое колесо, а - базовая поверхность, Ь - измерительная поверхность промежуточного тела 3, R - радиус базовой поверхности а. На фиг.2 позицией 7 обозначен ротор, сопрягаемый с контролируемым колесом 6,
Способ реализуется следующим образом.
Выполняют базовую поверхность а стола 1 измерительного устройства в виде сегмента вогнутой цилиндрической поверхности с радиусом R, равным разности диаметра выступа зубьев контролируемого колеса 6, настраивают измерительное устройство на номинальный размер контролируемого параметра, базируют контролируемое колесо 6 на базовой поверхности а устройства по диаметру выступов, ус- танаЪливают промежуточное тело 3 между индикатором 5 и контролируемым колесом 6, вводят в контакт с боковыми поверхностями зубьев колеса 6 промежуточное тело 3, связанное с индикатором 5 измерительного устройства и измеряют отклонение от номинального размера, а измерительную . поверхность b промежуточного тела 3 вьшолняют в виде призмы с углом d , определяемым соотношением
I on° 1 . Rp sin ct 180 -2 arcsin ,
r + ГР
R. - радиус окружности, проходящей через центры окружностей
зубьев ротора, сопрягаемого с контролируемь1м колесом 5; г,, - радиус зубьев контролируемого зубчатого колеса 6; Гр - радиус зубьев ротора, сопрягаемого с контролируемым зубчатым колесом 6; )Э - половина угла расположения зубьев ротора, сопрягаемого с контролируемым зубчатым колесом 6.
Форма базовой поверхности а, выполненной в столе 1, обусловлена тем, что при перемещении контролируемого колеса вокруг мгновенного центра вращения, которым является центр радиусной поверхности зуба, упирающегося в призму подвижного элемента двумя точками, два противоположных зуба
своими точками контакта последовательно опишут дугу радиусом, равным расстоянию от них до мгновенного центра вращения или разнице между диаметром выступов колеса и радиусом зуба. Так как D R+r, тоК Пр-г, где De - диаметр окружности выступов зубчатого колеса; г - радиус зуба.
Измерительная поверхность b подвижного элемента, выполненного в виде призмы, имеет угол d- , образованный касательными в точкаах контакта зубьев теоретического зацепления колеса и сопрягаемого ротора. Из расчетной схемы (фиг. 2) , что - О О 0,,2|3 .
У1 ол расположения, зубьев сопрягаемого ротора; 0 K,, К, г - радиус зубьев шестерни; ,.,Гр - радиус зуба
сопря1 аемо1 о ротора; О Rp 23
3
0
5
радиус окружности, проходящей через центр зубьев сопрягаемого ротора.
AK,ji 0,0 и AK.i OjO, . Исходя из это1 о определяется К AK,oL - угол призмы промежуточного тела 3. Из четырехугольника О, К К АК 180°- К,О,К. Известно, что , Kf Из треугольника ВО,
, 0
575/ °1°- . Из треугольника ,Q,K R sinj , тогда ВО, 0
. R р sin/5 arcsin- -5
г + гд О.К
2arcsin- ----1, Следовательно(flf ш 1 .
1 on т К р sinp 180 -2arcsin---.
ш + Гр
Радиусная базовая поверхность с радиусом R и призма с углом oi. обеспечивают самоустановку колеса на измерительной позиции в диапазоне, обусловленном смещением колеса относительно вертикальной оси симметрии в пределах перемещения вокруг мгновенного центра вращения, при котором положение шестерни не повлияет на показания индикатора 5.
Формула изобретения
Способ контроля зубчатых колес, заключающийся в том, что настраивают измерительное устройство на номи- нальньш размер контролируемого параметра зубчатого колеса по образцовой детали, базируют контролируемое колесо на базовой поверхности устройства, вводят в контакт с боковыми поверхностями зубьев коле.са подпружиненное промежуточное тело, связанное с индикатором измерительного устройства, и измеряют отклонение от номинального размера, отличающийся тем, что, с целью повышения точности, уменьшения трудоемкости и расшире.ния информативности при контроле гипоциклоидальном
1288490 4
го колеса планетарной 1 идромашины, выполняют базовую поверхность измерительного устройства в виде сегмента вогнутой цилиндрической поверхности с радиусом, равным разности диаметра выступов и радиуса зубьев контfO
ролируемого колеса, базируют контролируемое колесо по диаметру выступов, устанавливают промежуточное тело меж- .ду индикатором и контролируемым ког лесом, а измерительную поверхность промежуточного тела выполняют в виде призмы с угломЫ , определяемым соотношением
J5
с 180 - 2 arcsin
R f sinjB
+ г„
где R - радиус окружности, проходящей через центры окружностей зубьев ротора, сопрягаемого с контролируемым колесом;
- радиус зубьев контролируемого колеса;
Гр - радиус зубьев ротора, сопрягаемого с контролируемым колесом;
- половина угла расположения зубьев ротора, сопрягаемого с контролируемым колесом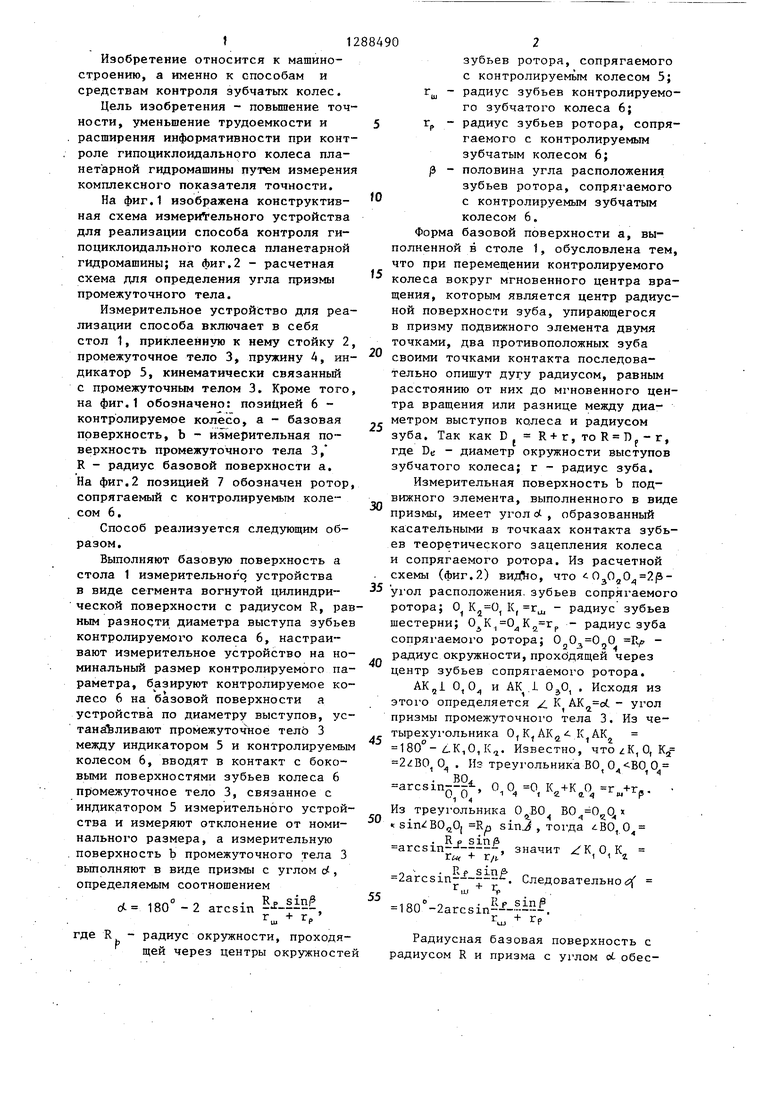
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля зубчатых колес | 1985 |
|
SU1288491A1 |
| Способ контроля зубчатых колес с внутренним зацеплением | 1988 |
|
SU1610233A1 |
| Способ контроля зубчатых колес с внешним зацеплением | 1989 |
|
SU1682757A1 |
| Способ контроля зубчатых колес с внешним зацеплением | 1988 |
|
SU1610232A1 |
| Способ контроля зубчатых колес с внутренним зацеплением | 1989 |
|
SU1682756A1 |
| ГЕРОТОРНЫЙ МЕХАНИЗМ | 2002 |
|
RU2250340C2 |
| ГЕРОТОРНЫЙ МЕХАНИЗМ | 2000 |
|
RU2162926C1 |
| Способ контроля радиального биения зубчатого венца | 1987 |
|
SU1476303A1 |
| Роторная гидромашина | 2018 |
|
RU2687189C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ОСЕВОГО ШАГА ВИНТОВЫХ НАРЕЗОК | 2006 |
|
RU2382329C2 |
Изобретение относится к машиностроению, а именно к методам и средствам контроля зубчатых колес. Цель изобретения - повьш1ение точности, уменьшение трудоемкости и расширение информативности при контроле гйпо-- циклоидального зубчатого колеса планетарной гидромашины путем измерения комплексного показателя точности. Базовую поверхность а измерительного устройства выполняют радиусной, а измерительную поверхность b проме- я уточного тела 3 - призматической. Такое базирование контролируемого колеса обеспечивает самоустановку колеса на измерительной позиции в диапазоне, обусловленном смещением колеса относительно вертикальной оси симметрии в пределах перемещения вокруг мгновенного центра вращения, при котором положение колеса не влияет на показания индикатора 5. 2 ил. i (Л 00 4 
Редактор А.Ворович
Составитель Б.Афонский
Техред И.Попович Корректор С.Черни
Заказ 7796/37 Тираж 700Подписное
ВНИШИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва,. Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
| Марков А.Л | |||
| Измерение зубчатых колес | |||
| Машиностроение, 1977, с,137, 141,192. |
