1
Изобретение относится к автоматике и может быть использовано для контроля направления перемещения или счета движупшхся объектов.
Цель изобретения - расширение области применения путем обеспечения возможности сопряжения с вычислительной машиной.
На фиг. 1 представлена функциональная схема устройства для контроля направления перемещения объекта; на фиг. 2 - временные диаграммы, поясняющие работу устройства.
Предлагаемое устройство содержит датчики 1-3, триггеры 4-9, генератор 10, элементы И-НЕ 11-16, элемент И 17, выходы 18-20, токозадаю- пщй резистор 21, положительную 22 ,. отрицательную 23 источника питания.
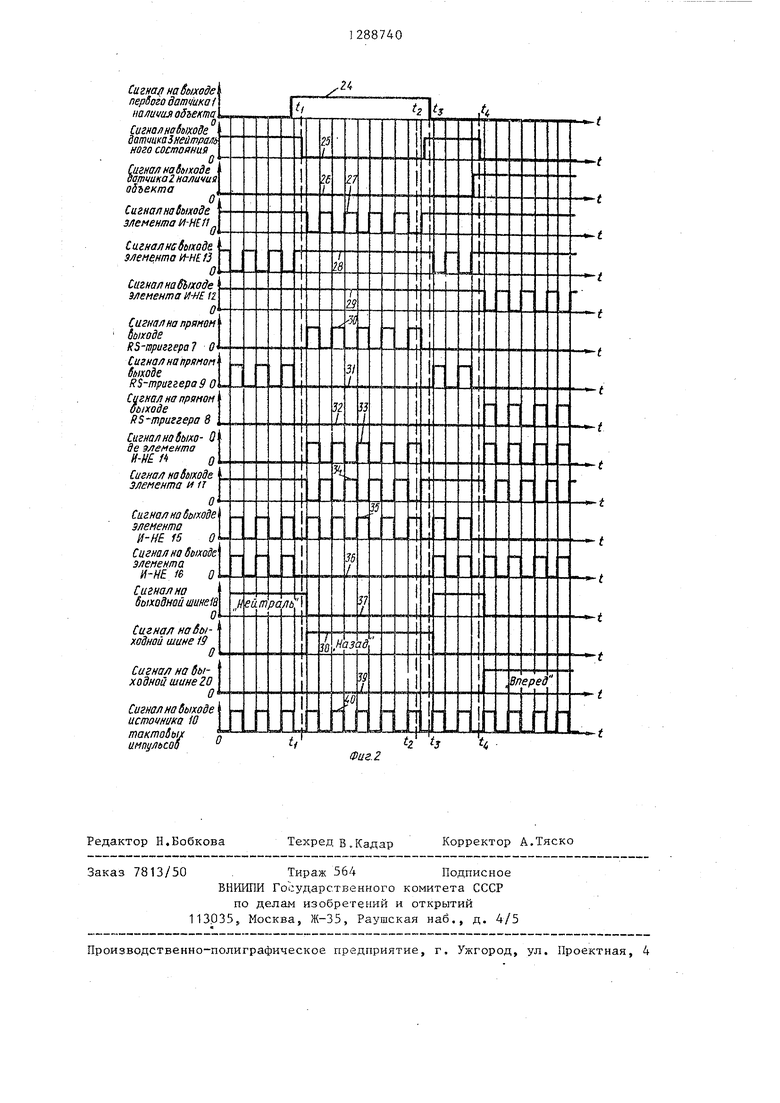
Временные диаграммы 24-26 обозначают сигналы на выходах первого датчиков 1, 3 и 2 соответственно. Временные диаграммы 27-29 обозначают сигналы на выходах элементов И-НЕ 11, 13 и 12 соответственно. Временные .диаграммы 30-32 обозначают сигналы ;на первых выходах триггеров 7, 9 и 8 соответственно. Временная диаграмма
33обозначает сигнал на выходе элемента И-НЕ 14. Временная диаграмма
34обозначает сигнал на выходе элемента И 17. Временные диаграммы 35 и 36 обозначают сигналы на выходах элементов И-НЕ 15 и 16 соответственно. Временные диаграммы 37-39 обозначают сигналы на выходах 18-20 устройства соответственно. Временная диаграмма 40 обозначает сигнал на выходе генератора 10 тактовых импульсов.
Устройство для контроля направления перемещения объекта работает следующим образом,
В исходном состоянии, когда контролируемый объект занимает нейтральное состояние, на выходе датчика 3 действует сигнал логической единицы (временная диаграмма 25), на выходах датчиков 1 и 2 - сигнал логического нуля (временные диаграммы 24 и 26). Следовательно, на выходах элементов И-НЕ 11 и 12 присутствует сигнал логической единицы, который поступает на вторые входы триггеров 7 и 8 (временные диаграммы 27 и 29). На выходе генератора 10 - последовательность тактовых импульсов (временная диаграмма 40), поэтому первым же сигна 5
20
25
12887402
лом логического нуля с выхода генератора 10, который поступает на первые входы триггеров 7 и 8, эти триггеры устанавливаются в устойчивое
5 состояние, в котором на их первых выходах действует сигнал логического нуля (временные диаграммы 30 и 32), на вторых выходах - соответственно логические единицы. Сигнал на выходе
0 элемента И-НЕ 13 представляет собой инвертированную последовательность тактовых импульсов (временная диаграмма 28), которая поступает на первый вход RS-тоиггера 9. На второй вход этого триггера подаются непос- , редственно-тактовые импульсы. Следовательно, триггер 9 переключается с частотой тактовых импульсов (временная диаграмма 31). Первым же сигналом логического нуля с второго выхода триггера 9, который поступает на третьи (S) входы триггеров 4 и 5, последние устанавливаются в устойчивое состояние, в котором на их выходах действует сигнал логического нуля (временные диаграммы 38 и 39). На оба входа элемента И 17 с выходов триггеров 7 и 8 подается единичный сигнал, поэтому на третьем входе триггера 6 - логическая единица. На первом входе этого триггера - также логическая единица (первые входы всех .триггеров 4-6 через резистор 21 соединены с положительной шиной питания,
35 что эквивалентно действию сигнала логической единицы). Следовательно, i создано условие для синхронизирован- 1ной работы триггера 6. На оба входа элемента И-НЕ 14 также с выходов
40 триггеров 7 и 8 подается логическая единица, поэтому на четвертом входе триггеров 6 - логический нуль. Первым же положительным перепадом сигнала на первом выходе триггера 9
5 (временная диаграмма 31), действующим на втором входе синхронизации триггера 6, последний устанавливается в состояние, при котором на его выходе есть единичный сигнал
50 (временная диаграмма 37). Следовательно, когда контролируемый объект в нейтральном состоянии, на выходе 18 устройства присутствует сигнал логической единицы, на выходах 19
55 и 20 - сигнал логического нуля.
Контролируемый объект начинает перемещаться. Чтобы исключить ситуацию, которая могла бы нарушить не30
прерывность контроля при перемещении объекта (это имеется при выходе объекта из зоны чувствительности датчика 3 и не попадании объекта в зону чувствительности датчика 1 или датчика 2), датчики 3 и 1, 3 и 2 попарно устанавливают с некоторым перекрытием их зон чувствительности. Следовательно, в течение некоторого интервала времени на выходах, на- пример, датчиков 3 и 1 одновремен1 о действует сигнал логической единицы. Но благодаря тому, что второй выход триггера 9 под1 ;лючен к третьим входам соответственно элементов И-НЕ 11 и 12, сигналом с второго выхода этого триггера 9 блокируется работа элемента И-НЕ 11 (или элемента И-НЕ 12). При этом в сработанном состоянии остается только триггер 6, т.е, на выходе 18 продолжает оставаться сигнал логической единицы, который является основой для информации Объект не вьшел еще из зоны нейтрального состояния. В момент t объект выходит из зоны чувствительности датчика 3 - на первом входе элемента И-ИЕ 13 с момента t устанавливается нулевой сигнал, поэтому тактовые импульсы источника после момента t не изменяют единичного сигнала на выходе элемента 13 (временная диаграмма 28) и, соответственно, на первом входе триггера 9. Следовательно, триггер 9 остается в устойчивом состоянии, при котором на его первом выходе - логический нуль, на втором выходе - логическая „единица.
Единичным сигналом с инверсного выхода этого триггера открывается по третьему входу элемент И-НЕ 11. Этот же единичный сигнал поступает на первый вход элемента И-НЕ 16 и на трети вход триггера 4. Таким образом, соз- дано условие для синхронизированной работы триггера 4. На четвертом входе указанного триггера (выходе элемета И-НЕ 16).устанавливается сигнал логического нуля (временная диаграм- ма 36). После момента времени t, первый же тактовый импульс генератора 10 вызыва&т появление на выходе элемента И-НЕ 1I (соответственно втором входе триггера 7) нулевого сигнала. Триггер 7 перебрасьшается в единичное состояние. На выходе элемента И 17, один из входов которого
соединен с вторым выходом триггера 7, также появляется нулевой сигнал, и триггер 6 перебрасывается в состояние, при котором на выходе 18 сигнал становится нулевым. Одновременно с этими процессами положительньм перепадом напряжения с первого выхода триггера 7 переключается триггер 4 направления перемещения. Состояние триггера 4 после переключения определяется сигналом на его четвертом входе выходе элемента И-НЕ 16), а на нем, как бьшо указано, логический нуль. Следовательно, на выходе триггера 4 и на выходе 19 устройства начинает действовать сигнал логической единицы, который является основой для выдачи информации, например, следующего характера Объект перемещается в направлении назад.
Дальнейшая работа устройства может происходить следующим образом. Например, в момент времени t . харак- тер перемещения объекта резко изменяется - направление перемещения изменяется в противоположное и резко возрастает скорость перемещения. В момент времени t 3 объект выходит из зоны чувствительности датчики 1 - на соответствующем входе элемента И-НЕ 1 устанавливается нулевой сигнал, поэтому тактовые импульсы генератора 10 после момента t, не изменяют единичного сигнала на выходе элемента И-НЕ 11 (временная диаграмма 27) и, соответственно, на втором входе триггера 7. Следовательно, триггер 7 ос- тается в устойчивом состоянии, при котором на его первом выходе - логический нуль. Объект, перемещаясь в рассматриваемом направлении, проходит зону чувствительности датчика 3. Если максимальная скорость перемещения объекта соизмерима с частотой тактовых импульсов, то при проходе зоны чувствительности датчика 3 на выходе 18 должен появиться кратковременный сигнал Объект в нейтраль - ном состоянии (временная диаграмма 37). В момент времени t объект, входя в зону датчика 2, выходит из зоны чувствительности датчика 3, поэтому триггер 9 остается в устойчивом состоянии, при котором на его первом выходе - логический нуль, на втором выходе - логическая единица. Единичным сигналом с второго выхода триггера 9 открывается по
третьему входу элемент И-НЕ 12. Этот же единичный сигнал поступает на второй вход элемента И-НЕ 15 и на четвертый вход триггера 5, Следовательно, создано условие для синхронизированной работы триггера 5. На четвертом входе триггера 5 (выходе элемента И-НЕ 15) устанавливается сигнал логического нуля (временная диаграмма 35). После момента времени t«, первый же тактовый импульс генератора 10 вызывает появление на выходе элемента И-НЕ 12 нулевого сигнала. Триггер 8 перебрасывается в состояние, при котором на его первом выходе устанавливается сигнал логической единицы. Через элемент И 17 сигналом логического нуля, поступающим на третий вход триггера 6, последний переключается в устойчивое состояние, при котором на выходе 18 сигнал становится нулевым. Одновременно с этим по переднему фронту импульса на первом выходе триггера 8 срабатывает триггер 5. На выходе триггера 5 (и на выходе 20) устанавливается сигнал логической единицы, который является основой для выдачи информации, например, следунщего характера: Объект перемещается в направлении Вперед. В дальнейшем этапы работы устройства чередуются в зависимости от направления перемещения контролируемого объекта.
Зоны чувствительности датчиков 1 и 2 наличия объекта и датчика 3 нейтрального состояния могут быть установлены очень небольшими, так как при соответствующем выборе частоты следования тактовых импульсов устройство обеспечит свои контрольные функции. Выбор частоты тактовых импульсов определяется в зависимости
от установленной зоны чувствительное- 45 И, четвертого и шестого элементов
ти датчиков и от максимально возможной скорости перемещения контролируемого объекта.
Зона чувствительности датчиков 1-3 устанавливается в зависимости от минимально возможной скорости пе- ;ремещения контролируемого объекта. Зона чувствительности устанавливаетс TaKj что при возможных по условиям работы реверсах объект достаточно быстро выходит (при минимальной скорости) из зоны чувствительности того датчика, в зоне которого может произойти реверс.
740
Формула
и
6
3 о
бретения
5
Устройство для контроля направления перемещения объекта, содержащее первый и второй датчики,,выходы которых подключены к первым входам соответственно первого и второго элементов И-НЕ, первый и второй триггеры, отличающееся тем, что, с целью расширения области применения путем обеспечения возможности сопряжения с вычислительной машиной, в него введены третий датчик, генератор, третий, четвертый, пятый и шестой элементы И-НЕ, элемент И, третий, четвертый, пятый и Шестой триггеры, токозадающий резистор, выход третьего датчика подключен к первому входу третьего элемента И-НЕ, вькод которого соединен с первым входом первого триггера, выход генератора подключен к вторым входам первого, второго, третьего элемента И-НЕ, к первым входам второго и третьего триггеров, к второму входу первого триггера, положительная клемма источника питания через токозадающий ре- зистор подключена к первым входам четвертого, пятого и шестого тригге- poBjC вторыми входами которых соединены первые выходы соответственно второго, первого и третьего триггеров второй выход второго триггера подключен к первым входам элемента И, 5 четвертого и пятого элементов И-НЕ, второй выход первого триггера соединен с первым входом шестого элемента И-НЕ, с вторым входом пятого элемента И-НЕ, с третьими входами четвертого и шестого триггеров, первого и второго элементов И-НЕ, выход которого подключен к второму входу третьего триггера, второй выход которого соединен с вторыми входами элемента
0
5
0
0
И-НЕ, выход которого подключен к четвертому входу четвертого триггера, выход которого является первым выхо- дом устройства, выходы элемента И и
четвертого элемента И-НЕ соединены соответственно с третьим и четвертым входами пятого триггера, вьпсод кото-, рого является вторым выходом устройства, выход пятого элемента И-НЕ
подключен к четвертому входу шестого триггера, выход которого является третьим выходом устройства, выход первого элемента И-НЕ соединен с вторым входом вторрго триггера.
фш.1
21
Редактор Н.Бобкова Заказ 7813/50
Техред В.Кадар
Корректор А
Тираж 564Подписное
БНИЖ1И Государственного комитета СССР
по делам изобретений и открытий 1130355 Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
Корректор А.Тяско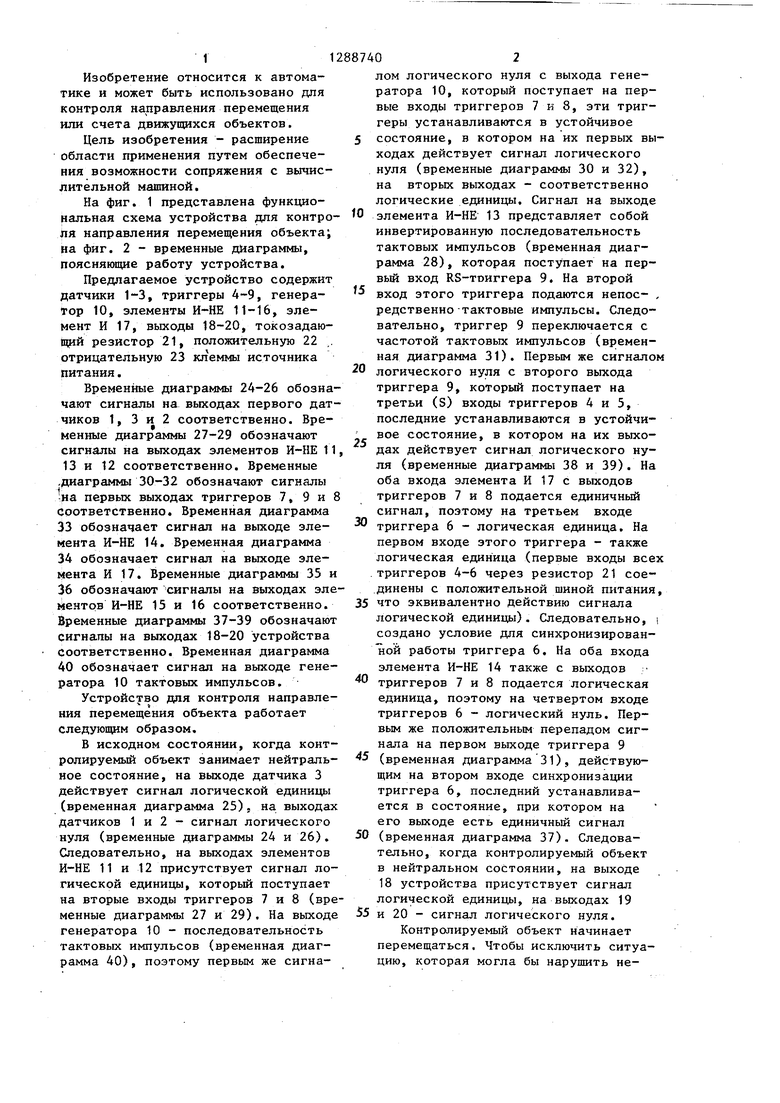

| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1988 |
|
SU1571547A1 |
| ОХРАННОЕ КОДОВОЕ УСТРОЙСТВО | 1990 |
|
SU1834548A1 |
| ПРОТИВОУГОННАЯ СИСТЕМА | 1995 |
|
RU2086437C1 |
| Устройство для регистрации подвижных объектов | 1984 |
|
SU1211790A1 |
| Датчик угловой скорости | 1985 |
|
SU1296949A1 |
| Устройство для контроля правильности электрического монтажа | 1984 |
|
SU1216782A1 |
| СТЕНД ДЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ КОЛЕС | 1991 |
|
RU2036449C1 |
| Устройство для контроля и управления технологическими процессами | 1984 |
|
SU1193641A1 |
| Устройство для программного управления | 1985 |
|
SU1267362A2 |
| ОХРАННОЕ КОДОВОЕ УСТРОЙСТВО | 1994 |
|
RU2084958C1 |
Изобретение относится к области автоматики и может быть использовано для контроля направления перемещения или счета движущихся объектов. Цель изобретения - расширение области применения путем обеспечения возможности сопряжения с ЭВМ. При перемещении объекта назад сигнал логической единицы появляется на первом выходе устройства. При прохождении зоны чувствительности среднего датчика сигнал логической единицы появляется на втором выходе устройства. При движении объекта вперед сигнал логической единищи появляется на третьем выходе устройства. Зона чувствительности датчиков устанавливается в зависимости от минимально возможной скорости перемещения контролируемого объекта. 2 ил. о $ (Л с ГС 00 06 sj 4
| Сигнальное устройство для определения направления движения объектов | 1977 |
|
SU737976A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Устройство для контроля направленияпЕРЕМЕщЕНия Об'ЕКТА | 1979 |
|
SU832336A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
