1
Изобретение относится к измерительной технике и может быть использовано для взвешивания груза в кузове автосамосвала.
Целью изобретения является повышение точности измерения за счет многократного контроля упругих деформаций нагруженных деталей подвески автосамосвала с последующей линеаризацией результатов контроля при одновременном исключении дрейфа нуля датчиков массы груза и влияния внешних дестабилизирующих факторов и повьш1ение надежности устройства за счет устранения аппаратных сбойных ситуаций.
На фиг. 1 изображена блок-схема предлагаемого устройства; на фиг.2 - структурная схема блока сопряжения, первый .вариант; на фиг. 3 - то же, второй вариант; на фиг. 4 - функциональная схема блоков перезапуска устройства и защиты памяти.
Устройство (фиг.О содержит четыре датчика 1 массы груза, блок 2 сопряжения, блок 3 перезапуска устройства, блок 4 защиты памяти, микропроцессорный модуль 5, блок 6 памяти, табло 7, первый сигнализатор 8 части массы, первый сигнализатор 9 номинальной загрузки, второй сигнализатор 10 части массы, второй сигнализатор 1 номинальной загрузки и клавишный переключатель 2.
Блок 2 сопряжения (фиг.2) содер- жит электронный коммутатор 13 аналоговых сигналов, элемент ИЛИ 14, дополнительные клавишные переключатели 15, аналого-цифровой преобразователь АЦП 16, индикатор 17 и интерфейс 18.
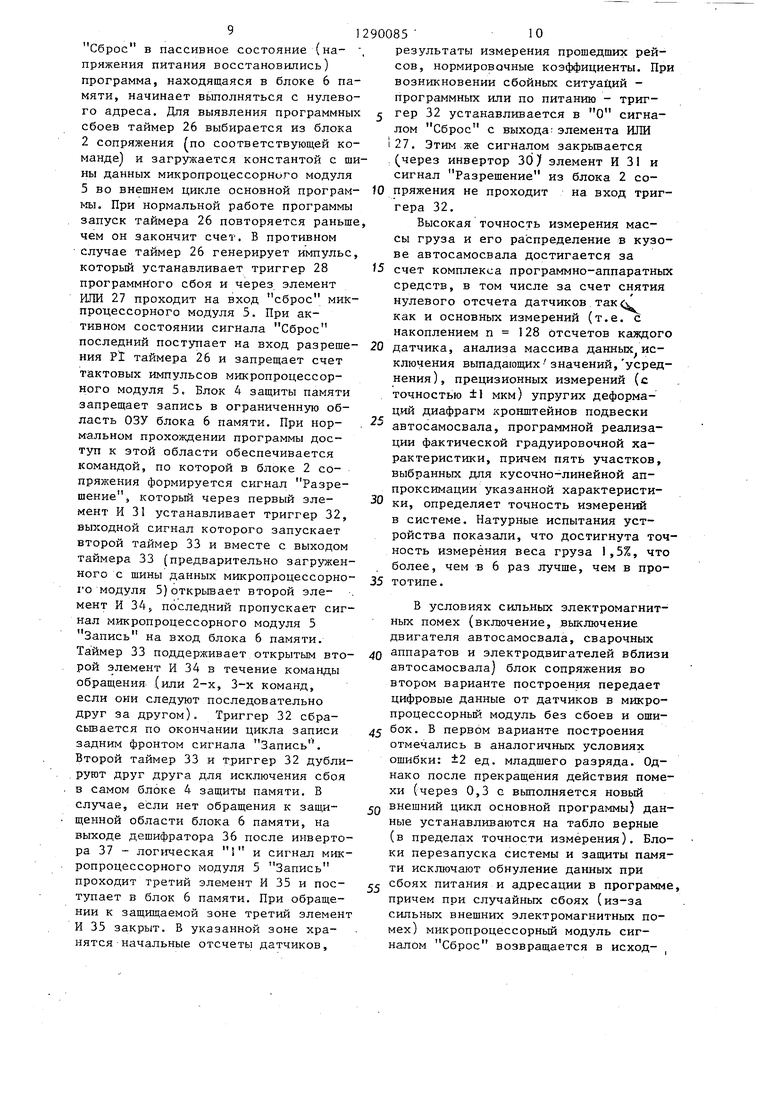
Блок 2 сопряжения (фиг.З) содержит четыре АЦП 19, дополнительные клавишные переключатели 20, элементы ИЛИ 21, индикатор 22 и интерфейс 23-.
Блок 3 перезапуска устройства (фиг. 4) содержит анализатор 24 питания, триггер 25 аппаратного сбоя, таймер 26, элемент ИЛИ 27, триггер 28 программного сбоя и одновибра- тор 29.
Блок 4 защиты памяти (фиг.4) содержит первый -инвертор 30, первый элемент И 31, триггер 32, таймер 33 второй элемент И 34,третий элемент И 35, дешифратор 36 и второй инвертор 37.
900852
Датчики 1 выполнены на основе механотронов вМХ2Б; блок 2 сопряжения в первом и втором вариантах выполнения (фиг.2) собран на микро5 схемах (МС) 176КТ1, К155ЛАГ1, .К140УД7, У155ЛА1, К572ПВ1, К155Ш8, К559Ш12, К559ИП1, К555ИЕ, KI55TM2, КР580ИК55, К155ИДЗ; блок 3 перезапуска устройства выполнен на МС
0 K521CAI, К155ЛА1, К155ТМ2, КР580ВИ53,, К155ЛЛ1; блок 4 защиты памяти вьтол- нен на МС К155ЛН1, К155ЛА4/ К153ЛН1, К155Ш2, КР580ВИ53, К155ЛА2; микро- процессорньй модуль 5 собран на ос 5 нове МС К58иИК80А, КР580ВК38,
КР580ГФ24, КР580ИР83; блок 6 памяти вьтолнен на микросхемах К537РУЗА, К573РФ2; табло 7 собрано на индикаторах АЛС321; сигнализаторы 8-11 полнены на базе четырех стандартных фонарей; клавишные переключатели 12 представляют собой набор переключателей П2К.
Первые входа блока 2 сопря жения (фиг.1) соединены с выходами четырех соответствующих датчиков 1 массы груза. Выходы клавишных переключателей 12 подключены к пятому входу блока 2 сопряжения. Первый вы ход блока 2 соединен с первым входом блока 4 защиты памяти, подключенного двумя выходами к соответствующим входам блока 6 памяти. Второй выход блока 2 сопряженя соединен с входом бло35 ка 3 перезапуска устройства, у которого выход подключен к второму входу блока 4 защиты памяти и входу микропроцессорного модуля 5. Первая и вторая двунаправленные шины микро- процессорного модуля 5 подключены соответственно к двунаправленным щинам блоков 2 сопряжения и памяти 6. Первый выход микропроцессорного модуля 5 соединен с вторым входом блока 3 перезапуска устройства 3 и четвертым входом блока 4 зашиты памяти. Четвертый и шестой выходы блока 2 сопряжения соединены соответственно
Q с входами первого и второго сигнализаторов 9 и 11 номинальной загруз ки, пятый и седьмой выходы блока 2 сопряжения соединены соответственно с первым и вторым сигнализаторами
„ 8 и 10 части массы. Третий выход блока 2 сопряжения соединен с табло, а второй выход микропроцессорного модуля 5 подключен к третьему входу блока 4 защиты памяти.
45
в первом варианте блока 2 сопряжения (фиг. 2.) его первые четыре входа соединены соответственно с первыми четырьмя входами электронного коммутатора 13 аналоговых сигналов, выход которого подключен к первому входу АЦП 16, соединенного своим выходом с входом дикатора 17 и третьим входом блока интерфейса 18,
Пятьш вход блока 2 сопряжения подключен к первому входу блока инт терфейса 18, а двунаправленные шины блоков сопряжения 2 и интерфейса 18 соединены друг с другом. Восьмой девятый, десятый и одиннадцатый выходы блока интерфейса 18 подключены к соответствующим четырем входам дополнительных клавишных переключателей 15, у которых первые четыре выхода соединены соответственно с пятым, шестым, седьмым и восьмым входами электронного коммутатора 13 аналоговых сигналов и с четырьмя входами элемента ИЛИ 14, подключенного своим выходом к второму входу АЦП 16. Пятый выход дополнительных клавишных переключателей 15 соединен с вторым входом блока интерфейса 18, у которого первый выход подключен к третьему выходу блока 2 сопряжения. Второй, третий, четвертый и пятый выходы блока интерфейса 18 соединены соответственно с четвертым, пятым, шестым и седьмым выходами блока 2 сопряжения, а шестой и седьмой выходы блока интерфейса 18 подключены соответственно к первому и второму выходам блока 2 сопряжения.
во втором варианте выполнения блока 2 сопряжения (фиг.З) его первые четыре входа соединены с первыми входами каждого из четырех АЦП 19, выходы которых поразрядно соединены с соответствующими входами четырехвходового блока элементов ИЛИ 21, соединенного своим выходом с входом индикатора 22 и третьим входом блока интерфейса 23. Пятый вход блока 2 сопряжения подключен к первому входу блока интерфейса 23, а двунаправленные шины блоков 2 сопряжения и интерфейса 23 соединены друг с другом. Восьмой, девятый, десятьш и одиннадцатый выходы блока интерфейса 23 подключены к соответствующим четырем входам дополнительных клавишных переключателей 20, у которых
90085
первые четыре выхода соединены соответственно с вторыми входами каждого из четырех АЦП 19. Пятый выход. дополнительных клавишных переключате5 лей 20 соединен с вторым входом блока интерфейса 23, у которого первый выход подключен к третьему выходу блока 2 сопряжения. Второй, третий, четвертый и пятый выходы блока инЮ терфейса 23 соединены соответственно с четвертым, пятым, шестым и седьмым выходами блока 2 сопряжения, а шестой и седьмой выходы блока интерфейса 23 подключены соответственно
5 к первому и второму выходам блока 2 сопряжения.
В блоке 4 перезапуска устройства (фиг. 4) выход анализатора 24 питания соединен с установочным входом
20 триггера 25 аппаратного сбоя, с первым входом элемента ИЛИ 27 и первым входом таймера 26, у которого выход подключен к второму входу элемента ИЛИ 27 и установочному входу триг гера 28 программного сбоя, а выход элемента ИЛИ 27 соединен с выходом блока 23 перезапуска устройства. Первый и второй входы блока 3 перезапуска соединены соответственно
30 с вторым и третьим входами таймера 26, а выход одновибратора 29 подключен к входам сброса триггеров аппаратного 25 и программного 28 сбоев.
В блоке 4 защиты памяти (фиг.4) его первый вход соединен с вторым входом элемента И 31 и вторым входом таймера 33, у которого выход подключен к первому входу элемента
40 И 34, соединенного своим выходом с первым выходом блока 4 защиты памяти. Второй вход блока 4 защиты памяти подключен к входу сброса триггера 32 и к входу инвертора 30, у
45 которого выход соединен с первым входом элемента И 31, подключенного своим выходом к установочному входу триггера 32, а выход триггера 32 соединен с первым входом таймера 33
50 и вторым входом элемента И- 34. Четвертый вход блока 4 защиты памяти подключен к входу дешифратора 36, ;у которого выход соединвн с входом инвертора 37, подключенного своим
55 выходом к второму входу элемента И 35. Четвертый вход блока 4 защиты памяти соединен с третьим входом таймера 33, а третий вход блока 4 защиты памяти подключен к тактовому
входу триггера 32, к третьему входу , элемента И 34 и первому входу элемента И 35, соединенного с вторым выходом блока А защиты памяти. Ин- формационньй вход триггера 32 соединен с общей шиной питания.
Устройство работает следующим об-i разом.
При включении питания в датчиках 1 формируются выходные напряжения, пропорциональные нагрузке диафрагм соответствующих кронштейнов подвески автосамосвала. В это же время из блока 3 перезапуска системы приходит в микропроцессорный модуль 5 сигнал Сброс и последний начинает выполнять программу, находящуюся в блоке 6 памяти. lio командам программы (основной режим) происходит обнуление регистров микропроцессорного модуля 5, опрос (через блок 2 сопряжения) клавишных переключателей 12, положение которых определяет режим работы программы и тип данных, выроднмых на табло. Далее последовательно п раз опрашиваются датчики 1 и результаты измерений S ; (j l, ... 4, i l,...n) накапливаются в виде массива размерностью Дп байт в блоке 6 памяти, определяется среднее значение : показаний каждого датчика 1 и анализируется весь массив: вычисляются разности между каждым отсчетом и средним значением соответствующего датчика 1, указанные разности сравниваются с величиной 0,25.3; , определяется количество выпадающих отсчетов m п (для которых разности lS;j - Sj I превьш ают величину 0,23.3: ). Если m п/2, программа вновь начинает опрос датчиков, накапливает массив 4п байт. Если m fcn/2, вычисляются новые средние значения 3; для всех датчиков 1 без учета выпадающих значений. Если кнопка Нулевой отсчет клавишных переключателей 12 нажата, то значения 3; заносятся в защищаемую область блока 6 памяти как нулевые отсчеты датчиков: 3° RJ. Если кнопка Нулевой отсчет отпущена, то разности 3; - 3; сравниваются с последоваW J,
тельными рядами значений: 3; /5, 2.,/5,. .. ,3;„, где Sj - показания, j-ro датчика 1 при номинальной загрузке. Если анализируемая разность лежит в интервале: КЗ,- /5, (К + :
на нормировочный коэффициен , полученный в результате калиб ровочных испытаний. Количествоfуча ков линеаризации характеристики си 5 темы К, при этом К 5, выбирает
МО КС
ся из условия достижения требуемой точности 2%. Полученный результат
3j ,j
(§ - S° } определяет наг рузку на данный кронщтейн подвески
О в тоннах. Определение нагрузки на переднюю ось осуществляется суммированием результатов 3, + 3 по по казаниям датчиков 1, установленных на пере дних кронштейнах, аналогично
5 задняя ось и 21 3; - загрузка авто
Г самосвала. Нагрузки S,+ 3 и 8
сравниваются с номинальными нагруз ками з, 3ц на переднюю и заднюю -Q оси, а также величинами 0,8.3j и
0,8.. При 3,+ 3, .0,83j формиру ется 1 в первом разряде 4-разряд ного слова состояния загрузки, кот рое через блок 2 сопряжения из мик
25 ропроцессорного модуля 5 поступает на сигнализаторы 8-11, причем первый разряд зажигает желтую лампочку на передней оси (80% нагрузки на Т ось), второй разряд - красную
3Q лампочку на Т оси (100% нагрузки), 3-й разряд - желтую лампочку на Т Т оси, 4-й разряд - красную лампочку на П оси (лампочки продублирован по обоим бортам автосамосвала). Ес нагрузка на обе оси автосамосвала составляет более 100%, чему соответствуют уровни логической 1 во втором и четвертом разрядах слова состояния, то производится N измерительных циклов. Если хотя бы в одном из измерительных циклов второй или четвертый разряды слова со тояния будут иметь уровень логичес кого О, то производятся новые из
45 мерения. Если в процессе N циклов значение указанных разрядов не изменяется, то загрузка считается по ной, после чего опрашивается ячейка защрпцаемой памяти, разрешающая
5Q модификацию ячеек, хранящих общий вес груза, перевезенного за смену, и число выполненных рейсов. Если модификация разрешена, выполняется суммирование результата текущей за рузки 213; t общим весом ранее перевезенного груза и инкрементирует ся содержимое ячейки - счетчика р
35
40
55
сов, после чего в ячейку защищаемо
+1)3,н /5J, , то разность 3j - S умно- памяти, разрешающей доступ к ячей
90085 6
на нормировочный коэффициент , полученный в результате калибровочных испытаний. Количествоfучастков линеаризации характеристики сис- 5 темы К, при этом К 5, выбираетМО КС
ся из условия достижения требуемой точности 2%. Полученный результат
3j ,j
(§ - S° } определяет нагрузку на данный кронщтейн подвески
О в тоннах. Определение нагрузки на переднюю ось осуществляется суммированием результатов 3, + 3 по показаниям датчиков 1, установленных на пере дних кронштейнах, аналогично 5 задняя ось и 21 3; - загрузка автоГ самосвала. Нагрузки S,+ 3 и 84
сравниваются с номинальными нагрузками з, 3ц на переднюю и заднюю -Q оси, а также величинами 0,8.3j и
0,8.. При 3,+ 3, .0,83j формиру-. ется 1 в первом разряде 4-разрядного слова состояния загрузки, которое через блок 2 сопряжения из мик25 ропроцессорного модуля 5 поступает на сигнализаторы 8-11, причем первый разряд зажигает желтую лампочку на передней оси (80% нагрузки на Т ось), второй разряд - красную
3Q лампочку на Т оси (100% нагрузки), 3-й разряд - желтую лампочку на Т Т оси, 4-й разряд - красную лампочку на П оси (лампочки продублированы по обоим бортам автосамосвала). Если нагрузка на обе оси автосамосвала составляет более 100%, чему соответствуют уровни логической 1 во втором и четвертом разрядах слова состояния, то производится N измерительных циклов. Если хотя бы в одном из измерительных циклов второй или четвертый разряды слова состояния будут иметь уровень логического О, то производятся новые из45 мерения. Если в процессе N циклов значение указанных разрядов не изменяется, то загрузка считается полной, после чего опрашивается ячейка защрпцаемой памяти, разрешающая
5Q модификацию ячеек, хранящих общий вес груза, перевезенного за смену, и число выполненных рейсов. Если модификация разрешена, выполняется суммирование результата текущей загрузки 213; t общим весом ранее перевезенного груза и инкрементирует- ся содержимое ячейки - счетчика рей35
40
55
сов, после чего в ячейку защищаемой
памяти, разрешающей доступ к ячей7
кам счетчика рейсов и суммарного веса перевезенного груза, записьгоает- ся индикатор, запрещающий повторное суммирование,. Вновь доступ к защищенной области разрешается лишь в начале следующей загрузки, т.е. если будет нажата кнопка Нулевой отсчет клавишных переключателей 12 Состояние клавишных переключателей 12, опрашиваемое в конце внешнего цикла программы, определяет режим индикации: на табло 7 выводится после преобразования в десятичную форму нагрузка на переднюю или заднюю ось или ИХ сумма текущей загрузки, или суммарный вес за смену, или количество произведенных рейсов.
Блок 2 сопряжения в первом варианте исполнения (фиг.2) работает следующим образом.
По команде выбора j-ro датчика 1 из интерфейса 18 через дополнительные клавишные переключатели 5 на входы электронного коммутатора 13 аналоговых сигналов приходит один из сигналов 1-1У и открывает соответствующий канал коммутатора 13, разрешая прохождение соответствующего сигнала датчика 1 на вход АЦП 16. Указанньш сигнал 1-1У через элемент ИЛИ 14 проходит на вход Запуск АЦП 16. После выполнения аналого-цифрового преобразования цифровой код вместе с сигналом готовности из АЦП 16 поступает в блок интерфейса 18, который передает их на входы микропроцессорного модуля 5. Информация с выходов А1Щ 16 поступает также на вход индикатора 17, который показывает состояние выходных шин АЦП 16. Индикатор 17 используется для визуального контроля работы устройства, а также для проверки работоспособности датчиков и для их юстировки при установке на автосамосвале. В этом случае отключается кабель микропроцессорного модуля 5, выборка датчиков 1 (генерация сигналов 1-IV) осуществляется нажатием кнопок в дополнительных клавишных переключателях 15. При этом поочередно проверяются и устанавливаются на автосамосвале датчики 1. Для введения в блок 6 памяти нормировочных коэффициентов з.амыкается кнопка Ввод в дополнительных клавишных переключателях 15, состояние этой кнопки, поступающее в блок интер90085 8
фейса 18, анализируется вместе с клавишными переключателями 12, и определяет переход основной программы на ветвь обслуживания ввода дан5 ных в заданную область блока 6 памяти.
Во втором варианте исполнения (фиг. 3) блок 2 сопряжения работает следующим образом.
10 По команде выбора j-ro датчика 1 из блока интерфейса 23 через дополнительные клавишные переключатели 20 на один из входов Запуск .- первого - четвертого АЦП 19 приходит
5 один из сигналов 1-1У и запускает
j-й АЦП 19. После выполнения аналого- цифрового преобразования цифровой код вместе с сигналом готовности из j-ro АЦП 19 поступает через монтаж20 ные схемы ИЛИ 21 в блок интерфейса 23, которьш передает их на входы микропроцессорного модуля 5. Информация с выходов схем ИЛИ 21 поступает также на вход индикатора 22, кото25
рый показывает состояние шины данных
выбранного датчш :а 1 на входе блока интерфейса 23. Контроль работоспособности датчиков 1, установка их и ввод данных в блок 6 памяти во вто- 0 ром варианте исполнения блока 2 сопряжения осуществляются аналогично первому (фиг.2).
Блоки I перезапуска системы 3 и за- -зс 1ДИТЫ памяти 4 (фиг. 4) работают следующим образом.
При включении питания RjC, цепь анализатора питания 24 генерирует импульс Сброс длительностью 100 мс,
Q который, проходя через элемент ИЛИ 27, поступает на вход Сброс микро-, процессорного модуля 5 и триггера 32 в блоке 4 защиты памяти. Также при включении питания одновибратор
29 формирует импульс длительностью 145 мс, который сбрасывает триггеры аппаратного 25 и программного 28 сбоев. Указанные триггеры имеют еве- тодиодную индикацию. При выходе хоQ тя бы одного из напряжений-(i5V, +12V) за пределы ±10% срабатывает соответствующий компЦратор анализатора 24 напряжения, выходной импульс которого генерирует сигнал
сг Сброс, последний устанавливает
триггер 25 аппаратного сбоя и, пройдя через элемент ИЛИ 27, поступает на вход Сброс микропроцессорного модуля 5. При переходе сигнала
Сброс в пассивное состояние (на- пряжения питания восстановились) программа, находящаяся в блоке 6 памяти, начинает выполняться с нулевого адреса. Для выявления программных сбоев таймер 26 выбирается из блока 2 сопряжения по соответствующей команде и загружается константой с шины данных микропроцессорного модуля 5 во внешнем цикле основной программы. При нормальной работе программы запуск таймера 26 повторяется раньше чем он закончит счет. В противном случае таймер 26 генерирует импульс которьй устанавливает триггер 28 программного сбоя и через элемент ИЛИ 27 проходит на вход сброс ми1с- процессорного модуля 5. При активном состоянии сигнала Сброс последний поступает на вход разрешения PI таймера 26 и запрещает счет тактовых импульсов микропроцессорного модуля 5. Блок 4 защиты памяти запрещает запись в ограниченную область ОЗУ блока 6 памяти. При нормальном прохождении программы доступ к этой области обеспечивается командой, по которой в блоке 2 сопряжения формируется сигнал Разрешение, который через первый элемент И 31 устанавливает триггер 32, выходной сигнал которого запускает второй таймер 33 и вместе с выходом таймера 33 (предварительно загруженного с шины данных микропроцессорного модуля 5)открьшает второй элемент И 34, последний пропускает сигнал микропроцессорного модуля 5 Запись на вход блока 6 памяти. Таймер 33 поддерживает открытым второй элемент И 34 в течение команды обращения, (или 2-х, 3-х команд, если они следуют последовательно друг за другом). Триггер 32 сбра- еьшается по окончании цикла записи задним фронтом сигнала Запись. Второй таймер 33 и триггер 32 дубли- .руют друг друга для исключения сбоя в самом блоке 4 защиты памяти. В случае, если нет обращения к защищенной области блока 6 памяти, на выходе дешифратора 36 после инвертора 37 лог1гческая и сигнал микропроцессорного модуля 5 Запись проходит третий элемент И 35 и поступает в блок 6 памяти. При обращении к защищаемой зоне третий элемент И 35 закрыт. В указанной зоне хранятся начальные отсчеты датчиков.
90085 10
результаты измерения прошедших рейсов, нормировочные коэффициенты. При возникновении сбойных ситуаций - программных или по питанию - триг5 гер 32 устанавливается в О сигналом Сброс с выхода: элемента ИЛИ 127. Этим же сигналом закрьшается .(через инвертор 30 элемент И 31 и сигнал Разрешение из блока 2 со10 пряжения не проходит на вход триггера 32.
Высокая точность измерения массы груза и его распределение в кузове автосамосвала достигается за
J5 счет комплекса программно-аппаратных средств, в том числе за счет снятия нулевого отсчета датчиков как и основных измерений (т.е. с накоплением п 128 отсчетов каждого
20 датчика, анализа массива данных исключения выпадающих значений, усреднения), прецизионных измерений (с точностью ±1 мкм) упругих деформаций диафрагм кронштейнов подвески
25
автосамосвала, программной реализации фактической градуировочной характеристики, причем пять участков, выбранных для кусочно-линейной аппроксимации указанной характеристики, определяет точность измерений в системе. Натурные испытания устройства показали, что достигнута точность измерения веса груза 1,5%, что более, чем в 6 раз лучше, чем в прототипе.
В условиях сильных электромагнитных помех (включение, выключение двигателя автосамосвала, сварочных
аппаратов и электродвигателей вблизи автосамосвала) блок сопряжения во втором варианте построения передает цифровые данные от датчиков в микропроцессорный модуль без сбоев и ошибок. В первом варианте построения отмечались в аналогичных условиях ошибки: ±2 ед. младшего разряда. Однако после прекращения действия помехи (через 0,3 с выполняется новый
внешний цикл основной программы) данные устанавливаются на табло верные (в пределах точности измерения). Блоки перезапуска системы и защиты памяти исключают обнуление данных при
сбоях питания и адресации в программе, причем при случайных сбоях (из-за сильных внешних электромагнитных помех) микропроцессорный модуль сигналом Сброс возвращается в исход- ,
и
ное состояние и устройство дальше работает нормально. Расширение функ циональньрс возможностей устройства заключается в измерении нагрузок на переднюю и заднюю оси автосамосвала индикации указанных нагрузок водителю, сигнализации оператору экскаватора о распределении груза в кузове на конечном этапе нагрузки (80%, 100% загрузки по обеим осям) с целью коррекции процесса погрузки и принятия решения о ее завершении. Достоинством устройства является место расположения датчиков, так как на их показания влияет только реальный вес груза, причем наличие дефектов в кронштейнах и других элементах подвески автомобиля приводит к изменени (увеличению) деформаций диафрагм на одном или двух кронштейнах, что вызьгоает сигнал перегрузки автосамосвала и тем самым исключает аварийные ситуации.
Использование устройства для контроля и учета рйботы, производимой транспортным средством, позволит повысить производительность при массовых карьерных перевозках грузов (угля, руды и др.) за счет объективного контроля оптимальности использования грузоподъемности транспортного средства (номинальная загрузка с учетом распределения груза в кузове и пр.), а также упростить учет выполненных работ по перевозке грузов и, как следствие этого, сократить численность обслуживающего персонала за счет возможности использования показаний по выработке за смену, месяц и т.д. (автоматизировать ).
Кроме того, устройство обеспечивает значительную экономию топлива за счет .установления практически обоснованных норм расхода, материальных и денежнь1х ресурсов, повьш1а- ет уровень планирования и достоверность статистической отчетности, а также предотвращает поломки, связанные с перегрузкой, повьшгает ресурс работы всех узлов и агрегатов в том числе пробег дорогостоящих шин. Из- за высокой стоимости большегрузных автомобилей каждый час их простоя в ожидании ремонта и в ремонте обходится дорого.
Таким образом; использование устройства позволяет, с одной стороны.
0085 .
автоматизировать и вести объективный учет работы транспортных средств, а с другой - рационально использовать автомобильный транспорт, удельный вес которого в технологических перевозках, например, руды для черной металлургии составляет 50%, для цветной - 75%, а при добыче горнохимического сырья - 55%.
O
5
0
5
0
5
0
5
0
5
.Формула изобретения 1. Устройство для измерения массы груза в кузове автосамосвала содержащее четыре датчика массы груза, табло, клавишные переключатели, первый сигнализатор части массы, первый сигнализатор номинальной загрузки, отличающееся -тем, что, с целью повьШ1ения точности измерения за счет многократного контроля упругих деформаций диафрагм кронштейнов подвески автосамосвала и увеличения информативности устройства за счет раздельной индикации результатов измерения по осям автосамосвала, датчики массы груза имеют механический контакт с диафрагмами кронштейнов подвески автосамосвала, а в устройство введены блок памяти, микропроцессорный модуль, блок перезапуска устройства, блок защиты памяти, второй сигнализатор части массы, второй сигнализатор номинальной загрузки и блок сопряжения, причем первые четыре входа блока сопряжения соединены с выходами соответствующих датчиков массы груза, а выход клавиш- ньгх переключателей подключен к пятому входу блока сопряжения, первый выход которого подключен к первому входу блока защиты памяти, соединенного своими двумя выходами с соответствующими входами блока памяти, второй выход блока сопряжения соединен с входом блока перезапуска устройства, выход которого подключен к второму входу блока защиты памяти и к входу микропроцессорного модуля, первая и вторая двунаправленные шины микропроцессорного модуля.подключены соответственно к двунаправленным шинам блоков сопряжения и памяти, а первый выход микропроцессорного модуля соединен с вторым входом блока перезапуска устройства и четвертым входом блока защиты памяти, четвертый и шестой выходы блока сопряжения соединены соответственно с входами первого и второго сигнализаторов
номинальной загрузки, пятый и седьмой выходы блока сопряжения соединены с входами соответственно первого и второго сигнализаторов части массы, третий выход блока сопряжения соединен с табло, а второй выход микропроцессорного модуля подключен к третьему входу блока защиты памяти.
2. Устройство по п.1, отличающееся тем, что его блок сопряжения содержит электронный коммутатор аналоговых сигналов, элемент ИЛИ, дополнительные клавишные- переключатели, аналого-цифровой преобразователь, индикатор и блок интерфейса, причем первые четыре входа блока сопряжения соединены соответственно с первыми четьфьмя входами электронного коммутатора аналоговых сигналов, выход которого подключен к первому входу аналого-цифрового преобразователя, подключенного своим выходом к входу индикатора и к третьему входу блока интерфейса, пятый вход блока сопряжения подключен к : первому входу блока интерфейса, а двунаправленные шины блоков сопряжения и интерфейса соединены друг с другом, восьмой, девятый, десятьм и одиннадцатый выходы блока интерфейса подключены к соответствующим четырем входам дополнительных клавишных переключателей, первые четыре выхода которых соединены соответственно с пятым,.шестьм, седьмым и восьмым входами электронного коммутатора аналоговых сигналов и с четырьмя входами элемента ИЛИ, подключенного своим выходом к второму входу аналого-цифрового преобразователя, пятый выход дополнительных клавишных переключателей соединен с вторым входом блока интерфейса, первыходами блока сопряжения, а шестой и седьмой выходы блока интерфейса подключены соответственно к первому и второму выходам блока сопряжения. 4.. Устройство по П.1, отличающееся тем, что, с целью повьш1ения его надежности путем контроля источников питания, блок перезапуска устройства содержит анализатор питания, триггеры аппаратного и программного сбоев, одновибратор, элемент ИЛИ и таймер, причем выход
вьй выход которого подключен к треть- анализатора питания соединен с устаему выходу блока сопряжения, второй, третий, четвертьй и пятьй выходы блока интерфейса соединены соответственно с четвертым, пятым, шестым и седьмым, выходами блока сопряжения, а шестой и седьмой выходы блока интерфейса подключены соответственно к первому и второму выходам блока сопряжения.
3. Устройство по п.1, отличающееся тем, что, с целью повьш1ения достоверности передачи данных, блок соппяжения содержит четыре аналого-цифровых преобразо50
новочным входом триггера аппаратного сбоя, с первым входом элемента ИЛИ и первым входом таймера, выход которого подключен к второму входу элемента ИЛИ и установочному входу триггера программного сбоя, а выход элемента ИЛИ соединен с выходом блока перезапуска устройства, первьш и второй выходы блока перезапуска устройства соединены соответственно с вторым и третьим входами таймера, а выход одновибратора подключен к входам сброса триггеров аппаратного и программного сбоев.
вателя, дополнительные клавишные переключатели, блок элементов ИЛИ, индикатор и блок интерфейса, причем первые четыре входа блока сопряжения соединены с первыми входами каждого из четырех аналого-цифровых преобразователей, выходы которых соединены с соответствующими входами четырехвходового блока элементов ИЛИ, соединенного своим выходом с входом индикатора и третьим входом блока интерфейса, пятьй вход блока сопряжения подключен к первому входу блока интерфейса, а двунаправленные 5 шины блоков сопряжения и интерфейса соединены друг с другом, восьмой, девятый, десятый и одиннадцатый выходы блока интерфейса подключены к соответствующим четырем входам дополнительных клавишных переключателей, первые четыре вьпсода котррых соединены соответственно с вторыми входами каждого из четырех аналого- цифровых преобразователей, пятьй выход дополнительных клавишных переключателей соединен с вторым входом блока интерфейса, у jcoTOporo первый выход подключен к третьему выходу блока сопряжения, второй, третий, четвертый и пятьй выходы блока ин-
теоФейса соединены соответственна с четвертым, пятым, шестым и седыф м
выходами блока сопряжения, а шестой и седьмой выходы блока интерфейса подключены соответственно к первому и второму выходам блока сопряжения. 4.. Устройство по П.1, отличающееся тем, что, с целью повьш1ения его надежности путем контроля источников питания, блок перезапуска устройства содержит анализатор питания, триггеры аппаратного и программного сбоев, одновибратор, элемент ИЛИ и таймер, причем выход
0
5
0
5
0
0
новочным входом триггера аппаратного сбоя, с первым входом элемента ИЛИ и первым входом таймера, выход которого подключен к второму входу элемента ИЛИ и установочному входу триггера программного сбоя, а выход элемента ИЛИ соединен с выходом блока перезапуска устройства, первьш и второй выходы блока перезапуска устройства соединены соответственно с вторым и третьим входами таймера, а выход одновибратора подключен к входам сброса триггеров аппаратного и программного сбоев.
5. Устройство по п.1, о т л и- чающееся тем, что блок защиты памяти содержит первый и второй инверторы, первый, второй и третий элементы И, дешифратор, триггер и таймер, причем первый вход блока защиты памяти соединен с вторым входом первого элемента И и вторым входом таймера, выход которого подключен к первому входу второго элемента И, соединенного своим выходом с первым выходом блока защиты памяти, второй вход блока защиты памяти подключен к входу сброса триггера и к входу первого инвертора, выход которого соединен с первым входом первого элемента И, подключенного своим
5
выходом к установочному входу триггера, а выход триггера соединен с первым входом таймера и вторым входом второго элемента И, четвертый вход блока защиты памяти подключен к входу дешифратора, выход которого соединен с входом второго инвертора, подключенного своим выходом к второму входу третьего элемента И, четвертый вход блока защиты памяти соединен с третьим входом таймера, а третий вход блока защиты.памяти подключен к тактовому входу триггера, к третьему входу второго элемента И и первому входу третьего элемента И, соединенного с вторым выходом блока защиты памяти.
г7/г7 Лгг. Л
/i &r. 5 А 5/J. 3 /f Sj7. Фс/г. Z
А Л 5
От 1
i
19
79
I f 4
W




| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения массы груза в кузове автосамосвала | 1986 |
|
SU1372196A1 |
| Устройство для контроля загрузки | 1987 |
|
SU1476322A1 |
| Способ контроля массы груза и устройство для его осуществления | 1988 |
|
SU1550328A1 |
| УСТРОЙСТВО КОНТРОЛЯ МАССЫ ГРУЗА, ПЕРЕВОЗИМОГО САМОСВАЛОМ, И ПОДВЕСКИ КАРЬЕРНОГО САМОСВАЛА | 2005 |
|
RU2311620C2 |
| МОДУЛЬ СИСТЕМНОГО КОНТРОЛЯ | 2003 |
|
RU2265240C2 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ СВОБОДНОСТИ УЧАСТКОВ ПУТИ ОТ ПОДВИЖНОГО СОСТАВА | 2015 |
|
RU2600175C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕСА ТРАНСПОРТНЫХ СРЕДСТВ | 1997 |
|
RU2116630C1 |
| Конвейерные весы | 1987 |
|
SU1569574A1 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 1994 |
|
RU2105270C1 |
| Устройство для измерения массы и управления потоком сыпучего материала | 1987 |
|
SU1525475A1 |


Изобретение относится к измерительной технике и позволяет повысить точность измерения и надежность работы. Устройство содержит датчики 1 массы груза, блок 2 сопряжения, блок 3 перезапуска устройства, блок 4 защиты памяти, микропроцессорный модуль 5, блок 6 памяти, табло 7, сигнализаторы 8 и 10 части массы, сигнализаторы 9 и 11 номинальной загрузки и переключатель 12. Введение новых элементов и образование новых связей между элементами устройства позволяет осуществить многократный контроль деформации подпружиненных деталей подвески автосамосвала с последующей линеаризацией результатов контроля при одновременном исключении дрейфа нуля датчиков I массы груза. Даны варианты блока 2 сопряжения. 4 з.п. ф-лы, 4 ил. с S (Л rsd 
яи
r
Jf
20
/Г
w
i 1
ffm г$/7. f2
.Ъ ftSj.
/f.7
23
.-//
. J
tffue.4Редактор A. Лежнина
Составитель С. Шакин Техред Л.Олейник
Заказ 7888/35Тираж 714Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор Л. Пилипенко
| Устройство для взвешивания грузов в кузове большегрузного автосамосвала | 1975 |
|
SU527601A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для взвешивания груза в автосамосвале | 1982 |
|
SU1049751A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
