Изобретение относится к весоизмерительной технике
| Цель изобретения - повышение точности.На чертеже представлена блок-схема устройства.
Конвейерные весы содержат грузо- приемный узел 1 с частотным датчиком 2 веса, датчик 3 скорости, триггер 4, две схемы И 5 и 6, два двоичных счетчика 7 и 8, блок 9 временного приема и хранения информации (блок памяти)) микропроцессорное вычислительное устройство 10, блок II таймера, блоки 12 индикации текущего времени, элект- рогидравпическое устройство 13 натяжения ленты транспортера, блок 14 сопряжения и управления печатающим устройством 15, пульт 16 управления.
Кроме того, устройство содержит блок 17 управления электроприводом 18 ленточного конвейера 19, натяжной ролик 20 электрогидравлического устройства 13 и датчик 21 контроля вели- чины прогиба ленты транспортера.
Грузоприемный узел 1 выполнен с использованием одной ролнкоопоры и встраивается между направляющими ставами ленточного конвейера0 Опорный ролик устанавливается таким образом, чтобы он был на расстоянии L от двух ближайших роликов неподвижных рам транспортера„ Такая установка гру- зоприемной платформы приводит к тому, что на опорный ролик платформы будет действовать груз, находящийся на измерительном участке L ленты транспортера, равный теоретической
1LL
длине платформы Ь т -у + -ч-
4,
Определение длины грузоприемной платформы служит для разметки ленты транспортера на мерные участки L. Эти участки обозначаются установкой металлических кнопок или скоб (не показаны). Начало ленты конвейера отмечается установкой двух скоб или кнопок.
Датчик 3 скорости установлен таким образом-, чтобы выдавать сигнал при прохождении очередной метки кнопки), обозначающей начало мерного участка L над грузоприемной плат- формой 1, Выход датчика 3 скорости подключен на счетный вход триггера 4 управления схемами И б и 5, а также на управляющие входы блока 9 временного приема и хранения информации и на интерфейс микропроцессорного вычислительного устройства 10о Прямой и инверсный выходы триггера 4 подключены на вторые пходы схем И 6 и 5, а также на управляющие входы двоичных счетчиков 7 и 8 приема информации от датчика 3 веса,
Грузопрнемный узел 1 передает вертикальную составляющую, пропорциональную массе взвешиваемого участка, на виброчастотный датчик 2. Выход датчика 2 веса подключен на первые входы схем И 6 и 5, а выходы этих схем подключены на суммирующие входы двоичных счетчикоп 7 и 8 датчика веса. Информация о весе транспортируемой массы накапливается в счетчиках 7 и 8, выходы которых подключены при помощи многоразрядных шин на вход блока 9 приема ч временного хранения информации.
Выход блока 9 при помощи многоразрядной шины подключен на интерфейс микропроцессорного вычислительного устройства 10, а управляющий сигнал подается с выхода микропроцессорного вычислительного устройства 10 на блок 9 приема и временного хранения информации. Блок I1 таймера предназначен для выдачи значения кода текущго времени на цифровую индикацию 12 и на интерфейс микропроцессорного вычислительного устройства 11 по информационной многоразрядной шине при подале с микропроцессорного вычислительного устройства на вход таймера управляющего сигнала. Вместе с тем блок 11 таймера выдает синхросигналы для работы блока 14 сопряжения микропроцессорного вычислительного устройства 10 с печатающим устройством 15, соединенных между собой информационными шинами о Бпок 14 сопряжения печати выдает управляющие сигналы печати на печатающее устройство 15.
Микропроцессорное вычислит ел ьное устройство 10 предназначено для выполнения алгоритма обработки информации, поступающей от датчика 2 веса и датчика 3 скорости, и управления всеми блоками и устройствами, входящими в микропроцессорные конвейерные весы. На управляющий вход микропроцессорного вычислительного устройства подключен датчик 21 прогиба ленты ковейера под действием загрузки, а управляющие выходы микропроцессорного
вычислительного устройства подключены на вход блока 9 приема и временного храпения информации, управляющие входы двоичных счетчиков 7 и 8, управляющий вход триггера 4, управляющий вход блока 17 управления электродвигателем 18, на валу которого находится приводной барабан 19 конвейерных весова К одному из управ- ляющих выходов интерфейса микропроцессорного вычислительного устройства 10 подключен электрогидравлический исполнительный механизм 13, имеющий механическую связь с осью ролика 20 натяжения ленты транспортера.
Занесение исходной информации для работы микропроцессорного вычислительного устройства, пуск весов и контроль правильности работы мик- ропроцессора осуществляются с помощью пульта 16 управления, имеющего клавиатуру и однострочный дисплейо Связь микропроцессорного вычислительного устройства 10 с пультом 16 управ ления осуществляется с помощью информационных и управляющих шин„
i
Конвейерные весы работают следующим образом,
Вначале выполняется разбиение ленты конвейера на мерные участки L LT LM, а затем осуществляется выбор двух образцовых цепей, вес первой из которых составляет 8-10%
от минимально допустимой нагрузки на ленту, а вес второй близок к макси- 1 мальиой загрузке ленты транспортера. Длина цепи выбирается из условия L ц 7/ 5L, чтобы при укладке ее на
ленту транспортера она равномерно располагалась на длине более 2-3 L до грузоприемного устройства, а также после него - не менее чем на 2 L, Тйкое распределение цепи создает ими- тацию равномерно распределенной наг-. рузки.
Емкость двоичных счетчиков 7 и 8 датчика веса устанавливается исходя из максимальной частоты датчика 2
веса при наибольшей загрузке леиты транспортера и минимальной скорости движения лентыо
Датчик 21 прогиба ленты транспортера устанавливается строго пер- пендикулярно ленте транспортера в плоскости центральной оси става конвейера, т.е, по центру ленты транспортера и на одинаковом расстоянии от
соседних роликоопор. Выходным air- налом датчика 21 прогиба ленты конвейера является частота. Дня определения величины прогиба ленты транспортера п необходимо полученное з начет- ние кода частоты умножить на коэффициент преобразования, т.е. n KtNt, где К, дается в метрах на герцы.
Конвейерные весы имеют два режима работы,
В первом режиме тарирования производится измерение веса пустой ленты конвейера, скорости ее движения и величины прогиба, т.е„ степени натяжения. Аналогичные операции производятся с первой и со второй образцовыми цепями. Результаты всех измерений запоминаются в оперативном запоминающем устройстве микропроцессорного вычислительного устройства.
Во втором рабочем режиме производятся измерение и определение транспортируемой массы с учетом ранее произведенных измерений и величины прогиба ленты на измерительном участке
Работа микропроцессорных конвейерных весов в режиме тарирования производится после запуска с пульта 16 управления. Предварительно в память микропроцессорного вычислительного устройства заносятся коэффициенты К,, К - коэффициент датчика вела, кг/Гц; Ка - коэффициент времени, с/Гц, что позволяет выполнять индивидуализацию датчиков при их установке и замене без аппаратных изменений в рассматриваемом устройстве.
При поступлении на вход микропроцессорного вычислительного устройства от датчика скорости двух последовательных импульсов (начато ленты транспортера) происходит установке в исходное состояние триггера 4, двух счетчиков 7 и 8 ддтчика веса, блока 9 временного хранения и приема информации от счетчиков датчика веса. Это приводит к тому, что на втором входе схемы И 6 будет разрешающий потенциал, а на управляющий вход V двоичного счетчика 7 поступит сигнал, разрешающий перезапись его содержимого в ячейку блока 9 временного хранения информации Частотный сигнал от датчика 2 веса поступает на счетный вход двоичного счетчика 8„ В счетчике накапливается число импульсов NA , пропорциональное весу пустой ленты за время прохождения f измернтельного участка ленты транспортера.
Датчик 3 скорости вырабатывает остроконечные импульсы малой длительности Они поступают на счетный вход триггера 4, на управляющий вход блока 9 временного приема и хранения информации и на интерфейс микропроцессорного вычислительного устройства 10в После сброса всех элементов устройства в исходное состояние (второй импульс при начале ленты) информация от датчика 2 веса поступает в двоичный счетчик 8, а микропроцессорное вычислительное устройство начинает подсчет импульсов, поступающих от внз треннего генератора блока 11 таймерав В одном из счетчиков микропроцессорного вычислительного устройства будет зафикси ровано второе число импульсов N , пропорциональное времени прохождения С мерного участка над роликом грузо приемной платформы, Преобразование вида, м/с:
v ь,м
i-c
к,
позволяет выполнить расчет скорости на каждом мерном участке ленты транспортера,
По окончанию мерного участка L,, датчик 3 скорости вырабатывает импульс, который поступит на счетный вход триггера 4 и установит его в единичное состояние Разрешающий потенциал с единичного выхода триггера установится на втором входе схемы И 5 и управляющем входе V двоичного счетчика 8. Сигнал датчика 2 веса теперь будет поступать на суммирующий вход двоичного счетчика 7, а по заднему фронту импульса датчика скорости произойдет перезапись содержимого двоичного счетчика 8 в блок 9 временного хранения информации. После перезаписи информации счетчик 8 будет установлен в нулевое состояние сигналом блока 9 (связь не показана). Аналогично предыдущему произойдут измерение времени прохождения второго мерного участка над роликоопорой грузоприем- ной платформы и расчет скорости ленты транспортерао
Выполнив более десяти аналогичных измерений и записи полученных значений частоты датчика веса в блок
0
5
0
5
0
5
0
5
9 временного хранения информации (сдвиг информации происходит.вправо, т.е. первая запись всегда сдвигается на одну ячейку вправо при поступлении слева второго содержимого счетчиков датчика веса и т.д„). микро-. процессорное вычислительное устройство выполняет операцию сравнения кодов. Пг, с N 2 и т.д. Аналогичным образом выполняется сравнение кодов N н с N 02 и т.д., считанных с блока1 9. Отличие сравниваемых кодов на заданную или меньшую величину свидетельствует о равномерности движения ленты транспортера и нагрузки на роликоопору Труэоприемного устройства, т.е. о поджатии роликоопоры к ленте и ее натяжении. Если величины значений, полученных в результате сравнения кодов, не превосходят заданную величину, то микропроцессорное вычислительное устройство производит запись частотного сигнала, датчика 21 прогиба ленты в одну из ячеек памятис В дальнейшем по программе микропроцессорного вычислительного устройства производятся аналогичные записи и сравнения полученных кодов с последующих участков ленты транспортера. Программа записи кодов, соответствуют- щих скорости протяжки ленты транспортера, веса пустой ленты транспортера и величины ее прогиба работает до появления двоичных импульсов от датчика 3 скорости. Если величины кодов, считываемых в режиме первой тарировки, будут больше заданных с пульта управления, то выполняется регулировка грузоприемного устройства с установкой начальной частоты датчика веса, а также увеличивается натяжение ленты транспортера для уменьшения ее прогиба и смещения центра приложения нагрузки к роли- коопоре грузоприемной платформы. После выполнения операций тарировки пустой ленты конвейера на ленту укладывается первая образцовая цепь. Все последующие операции по определению кодов и величины прогиба ленты транспортера будут выполняться в ранее описанной последовательности за исключением того, что запись кода от датчика 21 прогиба ленты транспортера будет производиться на всех мерных участках, на которые разбита лента В оперативном запоминающем устройст ве микропроцессорного вычислительно
го устройства будет сформировано три массива: массив кодов соответствующих времени прохождения измерительных участков; массив кодов, Соответствующий весу этих измерительных участков; массив кодов, соответствующий величине прогиба измерительных участков ленты транспортера.
Операции по определению и занесению кодов чисел, соответствующих третьему случаю, когда на ленту конвейера будет уложена вторая образцовая цепь, вес погонного метра которой соответствует максимальной погон- ной нагрузке транспортера, повторяются в ранее описанной последовательности и снова будут сформированы массивы кодов.
Все три операции по формированию кодов можно повторить несколько раз0
На следующем этапе выполняется контроль методом сравнения кодов, соответствующих времени прохождения мерных участков ленты транспортера Это позволяет осуществить выявление отдельных неточностей при записи кодов и проскальзывании ленты из-за недостаточной степени натяжения„
После выполнения всех перечислен- ных операций в режиме тарировки микропроцессорные конвейерные весы, предназначенные для непрерывного измерения массы груза, транспортируемого ленточным конвейером, готовы к работе. Рабочий режим работы микропроцессорных конвейерных весов устанавливается с пульта управления микропроцессорного вычислительного устройства Предварительно в ячейки оперативно- го запоминающего устройства заносятся коэффициенты преобразования кодов и начальные адреса занесения информации, считываемой с блока 9 временного хранения частотного сигнала дат- чика веса. Осуществляя визуальный контроль текущего времени с помощью блока 12 .ндикации, устанавливаем текущее время, синхронизированное с системой единого времени предприятия
После пуска микропроцессорных конвейерных весов запуск програм- микропроцессорного вычислительного устройства происходит после последовательного срабатывания датчика 3 ско
рости при прохождении меток начала ленты транспортера« Аналогично описан- ному происходят установка всех бло- гков аппаратуры в исходное состояние
10
5
0
5
о Q
с (
0
5
и начало занесения частотного сигнала датчика веса в один яз двоичных счетчиков 8 и 7, Отличительной особенностью рабочего режима при занесении информации от тарировочного является то, что запись кодов, соответствующих времени прохождения измерительных участков, происходит только на нечетных участках при первом обороте, а при втором - на четных. Запись кода, соответствующего прогибу ленты транспортера, выполняется на каждом измерительном участке
Одновременно с записью кодов в счетчики таймера микропроцессорного вычислительного устройства через параллельный интерфейс порта ввода осуществляется считывание информации с блока 9 приема и временного хранения в оперативное запоминающее устройство. Выполнив- перезапись кода, соответствующего весу измеренного участка, микропроцессорное вычислительное устройство начинает операции по анализу полученных измерений и их обработке. Если значение кода, соответствующее весу нагруженной ленты транспортера N.,, будет меньше или равно коду N веса пустой ленты транспортера, то микропроцессорное вычислительное устройство после сравнения кодов N и NfB(KOfla, соответствующего прогибу ненагруженной и нагруженной ленты) и кода-N,, с N ,, (кода, соответствующего времени прохождения мерного участка ленты при тарировании и при взвешивании) выполнит следующие операции.
Все коды, полученные в рабочем режиме, меньше значений кодов в режиме тарирования - режим Авария, произойдет остановка программы и печатающее устройство отпечатает Авария.
Если код N1B 37/No1 ; N3efF N3f, а N.jg.f NjЈ , то печатающее устройство выведет на печать Контроль датчика натяжения.
Если код , a .ji N, то после проверки величины отклонения кода соответствующего времени прохождения мерного участка, микропроцессорные конвейерные весы продолжат работу, а на печать выдается сообщение о проскальзывании ленты и увеличении натяжения ленты путем подачи управляющего сигнала на блок 13, если величина откло11
нения будет значительно болше заданной .
Если код.,, Т$звг N3t,, a N, то после контроля величины отклонения кода, соответствующго весу мерного участка, выполняетс следующая операция; если равен коду полученному на Ј-м участке при взвешивании первой образцовой цепи, то микропроцессорное вычислительное устройство выдает управляющий сигнал на блок 17 управления электропривод для уменьшения скорости ленты транпортера, а это позволит увеличить нагрузку на ленту J если величина ,N2 будет больше, то сравнение происходит с кодом, соответствующим макси- мальной нагрузке (вторая образцовая цепь) Если значение N г& меньше ко тарирования, но больше его половинного значения, и аналогично значение кода N.лл равно половине кода
7 О Iпрогиба ленты, то микропроцессорные конвейерные весы работают в нормальном режиме и происходит взвешивание транспортируемой массы груза.
Микропроцессорное вычислительное устройство реализует следующую зависимость ;
Q; 1 V(t)q(t)dt КХ t Jо
х J(f1(t)-f 10(t))f1(t)dt, б
де Q
Я-
ft(t) К1 -
К масса груза на V-м участке измерения;
t-, - время прохождения Г -го участка измерения;
V(t)- скорость;
q(t)- погонная нагрузка; f, (t) - частота датчика веса, соответствующая мгновенной
г нагрузке на грузоприемную
платформу;
ffo(t) - частота датчика веса, соответствующая мгновенной нагрузке на грузоприемную платформу при пустой ленте транспортера; частота датчика скорости; коэффициент преобразования частоты в скорость движения ленты транспортера; коэффициент преобразования частоты датчика веса в значение массы, транспортируемой ленточным конвейером.
12
В кодах, записываемых в ячейки микропроцессорного вычислительного устройства, ранее представленная зависимость будет выглядеть следующим образом:
Qf
° N fl -N0P VN3fl
fK3T
Если на отдельных участках измерения, значение величины кода N1B-j не превосходит величины весового кода, полученного при взвешивании второй цепи, а величина кода прогиба ленты N16 больше полученного при тарировании, то в предыдущее выражение вводится величина коррекции неравномерности загрузки ленты транспортера, Значение массы груза, взвешенного на таком участке, определяется выражением
QJ-OWN
Ki N3bA(Nl8
- н, г)
к
1
5
0
5
где NJ/I- код, соответствующий прогибу ленты транспортера при тарировании с цепью, имитирующей максимальную нагрузку на ленту транспортера,,
При превышении значения кода прогиба ленты транспортера на каждом участке за полный оборот ленты микропроцессорное вычислительное устрой- ство выдает управляющий сигнал на электрогидравлическое устройство 13 натяжения ленты транспортера. Происходит увеличение натяжения ленты, микропроцессорные конвейерные весы работают в оптимальном рабочем режиме„ После полного оборота ленты транспортера микропроцессорное вычислительное устройство выполняет алгоритм определения производительности ленточного транспортера, реапизуя зависимость
N Q S Q
.О- t v
0
или
Ј п 2LQ-C
J«
/
где Q - производительность транспортера за один оборот ленты; N - количество участков разбиения ленты конвейера; п - количество участков измерения, на которых величина нагрузки ленты транспортера находилась в пределах 10-100% загрузки, а прогиб ленты находился п заданном пределе; m - количество участков измерения, на которых величина,нагрузки ленты транспортера находилась в пределах 10-100% загрузки, но прогиб ленты превосходил в допустимых пределах максимальное значение при тарировании весов. После получения кода, соответствующего производительности ленточного конвейера за один оборот или за задашгый промежуток времени, микропроцессорное вычислительное устройство производит выдачу его на ин0
ти, пульт управления, таймер.и печатающее устройство с блоком сопряжения, при этом выход датчика скорости подключен к первому управляющему входу микропроцессорного вычислительного устройства, управляющему входу блока памяти н к счетному входу триггера, выходы которого подключены соответственно к одним входам схем И и к первым управляющим входам счетчиков, выход датчика веса подключен к другим входам схем И, выходы которых соединены с суммирующими входами соответствующих счетчиков, второй выход микропроцессорного вычислительного устройства подключен к .управляющему входу триггера, вторым управляющим входом счетчи

| название | год | авторы | номер документа |
|---|---|---|---|
| Весы | 1989 |
|
SU1783314A1 |
| Способ определения производительности ленточного конвейера и устройство для его осуществления | 1982 |
|
SU1167439A1 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 1994 |
|
RU2105270C1 |
| Устройство для взвешивания движущихся объектов | 1987 |
|
SU1571414A1 |
| Конвейерные весы | 1989 |
|
SU1682818A1 |
| Устройство для взвешивания движущихся объектов | 1987 |
|
SU1571408A1 |
| Автоматическая микропроцессорная весоизмерительная система | 1987 |
|
SU1566226A1 |
| Устройство для измерения массы и управления потоком сыпучего материала | 1987 |
|
SU1525475A1 |
| Устройство для взвешивания движущихся объектов | 1989 |
|
SU1691689A1 |
| Конвейерные весы | 1980 |
|
SU885817A1 |
Изобретение относится к области весоизмерительной техники и предназначено для определения массы материала, транспортируемого ленточным конвейером в металлургической, химической, горнорудной и других отраслях промышленности. Цель - повышение точности взвешивания, расширение области применения весов и повышение надежности устройства в работе. Устройство содержит микропроцессорное вычислительное устройство (МВУ) 10 с датчиком 2 веса, грузоприемной платформой 1, датчиком 3 скорости, датчиком 21 прогиба ленты транспортера, таймером 11 с блоком 12 индикации, двоичные счетчики 7 и 8, блок 9 временного приема и хранения информации, блок 14 сопряжения с печатающим устройством 15 и обратные связи на блок 17 управления электроприводом 18 ленточного конвейера 19 и электрогидравлическое устройство 13 натяжения ленты транспортера, а также триггер 4 и схемы И 5, 6. Применение МВУ с клавишным пультом 16 управления позволяет осуществлять программную настройку всего устройства и вносить необходимые изменения в режиме настройки и индивидуализации в месте установки. Документальная регистрация интегральной производительности конвейерных весов в заданные промежутки времени совместно с печатью текущего времени позволяет расширить область применения устройства. 1 ил.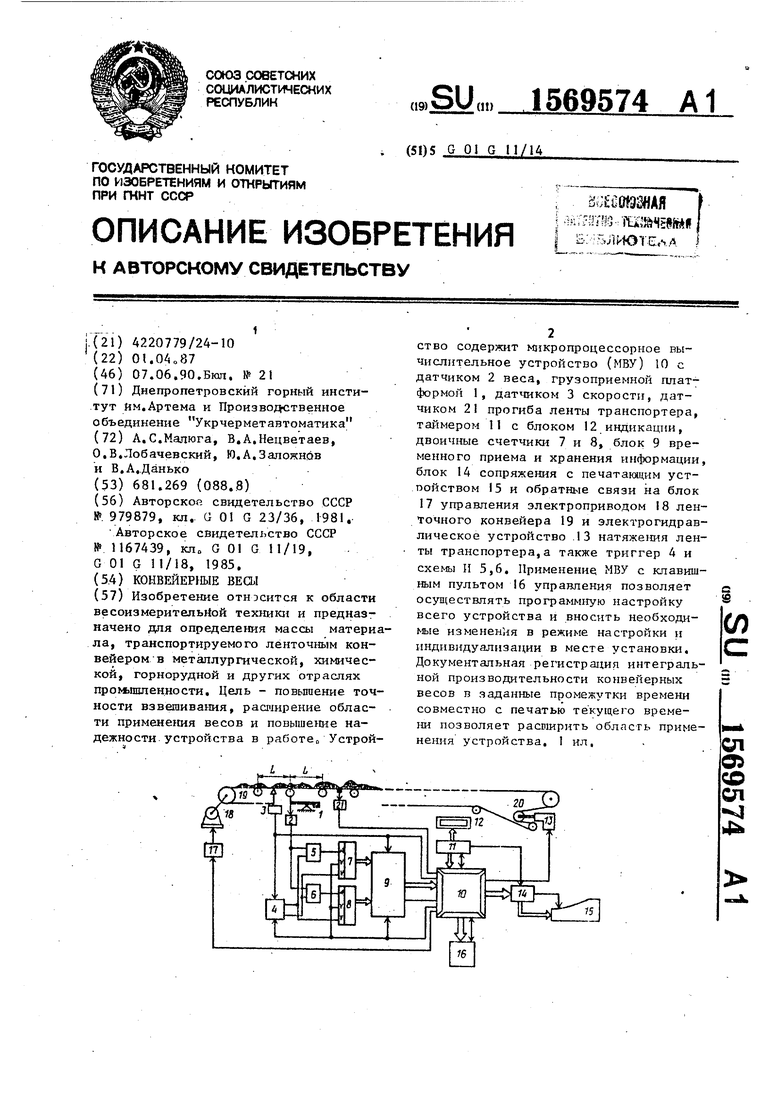
формацнонную шину блока 14 сопряжения ,л ков н к второму входу блока памяти 7 с печатающим устройством 15 о Но сиг- третий и четвертый входы которого налам таймера I1 происходит запись информации в блок 14 и пуск печатающего устройства,. На бумажный носитель осуществляется печать времени и веса транспортируемого материала по нарастанию, Интервал печати результатов взвешивания задается таймером
подключены соответственно к выходам счетчиков, пятый вход связан с третьим выходом микропроцессорного 25 вычислительного устройства, а выходная шина подключена к интерфейсу микропроцессорного вычислительного устройства, второй управляющий вход которого подключен к выходу датчика натяжения ленты, вход устройства натяжения ленты транспортера подсоединен к управляемому выходу микропроцессорного вычислительного устройства, двунаправленные входы которого подключены к соответствующим входам пульта управления и таймера, информационные входы блока сопряжения и пульта управления подсоединены к соответствующим входам микропроцессорного вычислительного устройства, а управляющий вход блока сопряжения подключен к соответствующему выходу таймера, информационные выходы которого подключены к соответствующим
Формула изобретения -JQ
25
Конвейерные весы, содержащие гру- зоприемный транспортер с электроприводом, связанный с датчиком веса, счетчик, датчик скорости, микропроцессорное вычислительное устройство, блок индикации текущего времени, две схемы И и блок управления, вход которого подключен к первому выходу микропроцессорного вычислительного устройства, а выход - к электроприводу, отличающиеся тем, что, с целью повышения точности, в них введены электрогидравлическое
устройство натяжения ленты транспорте-д входам микропроцессорного вычислитель- ра, датчик прогиба ленты, дополни-кого устройства и блока индикации
тельный счетчик, триггер, блок памя-текущего временно
ков н к второму входу блока памяти 7 третий и четвертый входы которого
подключены соответственно к выходам счетчиков, пятый вход связан с третьим выходом микропроцессорного вычислительного устройства, а выходная шина подключена к интерфейсу микропроцессорного вычислительного устройства, второй управляющий вход которого подключен к выходу датчика натяжения ленты, вход устройства натяжения ленты транспортера подсоединен к управляемому выходу микропроцессорного вычислительного устройства, двунаправленные входы которого подключены к соответствующим входам пульта управления и таймера, информационные входы блока сопряжения и пульта управления подсоединены к соответствующим входам микропроцессорного вычислительного устройства, а управляющий вход блока сопряжения подключен к соответствующему выходу таймера, информационные выходы которого подключены к соответствующим
| Конвейерные весы | 1981 |
|
SU979879A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ определения производительности ленточного конвейера и устройство для его осуществления | 1982 |
|
SU1167439A1 |
