Изобретение относится к весоизмерительной технике и может быть использовано для измерения массы движущихся объектов, массы груза, транспортируемого ленточными или другими конвейерами, в непрерывных или порционных дозаторах с аналоговыми датчиками веса.
Цель изобретения - повьшение точности измерения за счет повышения точности аналого-цифрового преобразования сигнала датчика веса.
На фиг. 1 приведена схема предложенного устройства; на фиг. 2 - временные диаграммы его работы.
Устройство для измерения массы и управления потоком сыпучих материалов (фиг. 1) содержит аналоговый датчик 1 веса, специализированный преобразователь 2 аналог - частота, триггер 3, генератор Д прямоугольных импульсов, таймер 5, содержащий три счетчика импульсов, инвертор 6, микропроцессорный вычислительный блок 7, снабженный интерфейсом 8 ввода-вывода, индикатор 9 результата взвешивания, исполнительные механизмы 10 для управлния потоком сыпучих материалов и импульсный датчик 11 скорости, подключенный через интерфейс 8 ввода-вывода к одному из входов микропроцессорного вычислительного блока 7. Выход датчика 1 веса соединен с информационным входом преобразователя 2 аналог - частота, первьо выход которого подключен к информационному входу третьего счетчика таймера 5, второй выход - к входу по питанию датчи5
0
5
0
5
0
5
ка 1 веса, а информационные входы первого и второго счетчиков таймера 5 и второй вход микропроцессорного вычислительного блока 7 (через интерфейс 8 ввода-вывода) соединены с выходом генератора А прямоугольных импульсов. Разрешающие входы первого и второго счетчиков таймера 5 подключены к источнику опорного напряжения, а разрешающий вход третьего счетчика таймера 5 через инвертор 6 соединен с выходом первого счетчика таймера 5 и через интерфейс 8 ввода-вывода - с третьим входом микропроцессорного вычислительного блока 7. Четвертый вход микропроцессорного вычислительного блока 7 через интерфейс 8 ввода-вывода подключен к выходу второго счетчика таймера 5, а первый выход микропроцессорного вычислительного блока 7 через интерфейс 8 ввода-вывода соединен со счетным входом триггера 3, один из выходов которого подключен к управляющему входу преобразователя аналог - частота. Второй и третий выходы микропроцессорного вычислительного блока 7 через интерфейс 8 ввода-вывода соединены соответственно с входом Чтение и входом Запись таймера 5, а шина данных (11Щ) и шина адреса (ША) микропроцессорного вычислительного блока 7 через интерфейс 8 ввода-вывода соединены с соответствующими шинами таймера 5. Индикатор 9 через интерфейс 8 ввода- вывода соединен с четвертым выходом микропроцессорного блока 7, на пятый выход которого через интерфейс 8 вво 15
да-вывода подключены исполнительные
механизмы 10.
Каждый счетчик таймера 5 представляет собой 16-рачрядный рег нстр обратного счета, т.е. работающий только на вычитание. Микропроцессорный вычислительный блок 7 содержит микропроцессор (МП), постоянную память (ПЗУ), оперативную память (ОЗУ) и другие элементы и пред азначен для управления процессом взвешивания и дозирования, а также вьиюлнения арифметических операций.
Все блоки предлагаемого устройства являются стандартными и выпускаются серийно. Например, в качестве триггера 3 можно использовать микросхему К155ТВ1, таймера 5 - микросхему К58ВИ53. В качестве источника опор
ного напряжения U может использоваться любое напряжение устройства, соответствующее 1.
Устройство работает следующим образом.
При измерении массы груза, перемещаемого ленточным конвейером, т.е. при работе устройства импульсы от
Наличие в выражении (2) знака ± вызвано тем, что на втором выходе специализированного преобразователя 2 аналог - частота формируется напряжение питания для тензодатчиков дат- 25 чика 1 веса. Причем полярность напряжения питания, подаваемая от преобразователя аналог - частота на тензодат- чики, зависит от уровня сигнала на уптой fj.(t), пропорциональной скорости движения ленты конвейера, через интерфейс 8 ввода-вывода поступают в микропроцессорный вычислительный блок 7, в котором по длительности периода Т, поступления импульсов опре СП
Рравляющем входе преобразователя 2 ана- датчика скорости (фиг. 2) с часто- астота. Если этот сигнал соответствует 1, то уровень напряжения питания тензодатчиков одной полярности, если О - другой.
Непосредственному измерению сигна- ,„ ла датчика 1 веса предшествует настройка таймера 5. Для инициализ.ации таймера 5 с микропроцессорного вычислительного блока 7 должен быть введен в таймер 5 набор управляющих слов, за- где h - отрезок пути, при прохождении 40 Дающих нулевой режим и начальные зна- которого лентой конвейера датчик 11 скорости вырабатывает очередной импульс .
Работа устройства состоит в многократном измерении в интервале значений сигнала датчика 1 веса, вычислении масс груза М ; перемещаемых
деляется скорость V на интервале Т
ср,; h/Tc.;
C.I
движения ленты
(1)
45
чения каждого в отдельности счетчика. Для этого в момент времени t на ША через интерфейс 8 ввода-вывода с микропроцессорного вычислительного блока 7 выставляется адрес первого счетчика таймера 5. Затем с третьего выхода микропроцессорного вычислительного блока 7 через интерфейс 8 ввода-вывода на вход Запись таймера 5 (линия связи 14) подается импульс нулевой полярности, по которому ШД микропроцессорного вычислительного блока 7 через интерфейс 8 ввода-вывода в первый счетчик таймера 5 записывается начальный код п, . Следующей команд,ой микропроцессорного вычислительного блока 7 на ША выставляется адрес третьего счетчика таймера 5 и с ищ микропроцессорного блока 7 чеконвейером за время Т
J. ; и, наконец,
определении результирующее массы груза Мр, перемещенной конвейером за время взвешивания о.
Сигнал и, с датчика 1 веса, пропорциональный массе груза на участке измерения конвейера, поступает на информационный вход преобразователя 2 аналог - частота. Па первом (информационном) выходе ире;образователя 2 аналог - частота вырабатывается сигнал и2 с частотой
() 2fo Г
X о
K,(Ugt.1,J,
(2)
с
где f.
f ,:
0
к. L a сипараметры преобразователя 2 аналог - частота; коэффициент пропорциональности;полезный информационный сигнал датчика 1 веса; величина дрейфа нуля датчика 1
веса или величина разбаланса моста тензодат- чиков.
Наличие в выражении (2) знака ± вызвано тем, что на втором выходе специализированного преобразователя 2 аналог - частота формируется напряжение питания для тензодатчиков дат- чика 1 веса. Причем полярность напряжения питания, подаваемая от преобразователя аналог - частота на тензодат- чики, зависит от уровня сигнала на упНепосредственному измерению сигна- ла датчика 1 веса предшествует настройка таймера 5. Для инициализ.ации таймера 5 с микропроцессорного вычислительного блока 7 должен быть введен в таймер 5 набор управляющих слов, за- Дающих нулевой режим и начальные зна-
чения каждого в отдельности счетчика. Для этого в момент времени t на ША через интерфейс 8 ввода-вывода с микропроцессорного вычислительного блока 7 выставляется адрес первого счетчика таймера 5. Затем с третьего выхода микропроцессорного вычислительного блока 7 через интерфейс 8 ввода-вывода на вход Запись таймера 5 (линия связи 14) подается импульс нулевой полярности, по которому ШД микропроцессорного вычислительного блока 7 через интерфейс 8 ввода-вывода в первый счетчик таймера 5 записывается начальный код п, . Следующей команд,ой микропроцессорного вычислительного блока 7 на ША выставляется адрес третьего счетчика таймера 5 и с ищ микропроцессорного блока 7 через интерфейс 8 ввода-вывода в третий счетчик таймера 5 записывается начальный код FFFF,,-) (единицы во всех разрядах счетчика). Запись в первый счетчик таймера 5 начального кода П) при наличии 1 на разрешающем входе РJ открывает первый счетчик таймера 5, и импульсы от генератора А прямоугольных импульсов с частотой f начнут проходить на первый счетчик таймера 5, уменьшая его значение, т.е формируется первый интервал измерения ty сигнала датчика 1 веса. Импульсы от генератора 4 поступают также по линии 17 связи непрерывно через интерфейс 8 ввода-вывода на микропроцессорный вычислительный блок 7, синхронизируя работу всех его узлов.
Значение начального кода п вы- бирается таким, чтобы при частоте f генератора 4 прямоугольных импульсов обеспечить необходимую длительность интервала измерения t у, (например.
-U.1
0,1 с)
HI fr tu.i(3)
После занесения начального кода hi в первый счетчик таймера 5 (момент t сигнал на выходе Q (i таймера 5 становится равным нулю, следовательно, на разрешающий вход Р третьего счетчика таймера 5 через инвертор 6 подается сигнал и высокого уровня (фиг. 2), разрешающий тем самым прохождение импульсов от преобразователя 2 аналог - частота на третий счетчик таймера 5, т.е. начинается подсчет (в обратном коде) количества импульсор от преобразователя 2 аналог - частота.
После того, как в первый счетчик таймера 5 поступит количество импульсов, равное заданному п,(момент t), на выходе Q таймера 5 вырабатывается единичный сигнал прерывания, который
через интерфейс 8 ввода-вывода поступает в микропроцессорный вычислительный блок 7 (линия связи 15). При этом автоматически запирается первый счетчик таймера 5 и через инвертор 6 низкий уровень на разрешающем входе Р блокирует счет третьего счетчика таймера 5. При этом в третьем счетчике таймера 5 будет зафиксировано значение кода N,, пропорциональное сигналу датчика 1 веса на интервале измере-
ния t
0
N, tu., - f t., Kf,U,
tu,K(U., 1,.J,
Q с
n
5
д
0
5
5
где UQ, - полезный информационныйсигнал датчика 1 веса в интервале измерений времени
tu,- По сигналу прерывания (по линии
связи 15) микропроцессорный вычислительный блок 7 выставляет через интерфейс 8 ввода-вывода на ША адрес второго счетчика таймера 5, а на ШД - начальный код п счетчика. Затем через интерфейс 8 ввода-вывода микропроцессорный вычислительный блок 7 / по
линии связи 14 ) подает на таймер 5 сигнал Запись, по которому во второй счетчик таймера 5 с ШД переписывается начальный код п и открывается для счета второй счетчик таймерг 5 (на разрешающем входе Р , высокий уровень сигнала). Затем с первого выхода микропроцессорного вычислительного блока 7 (линия связи 12) через интерфейс 8 ввода-вывода на счетный вход триггера 3 поступает импульс, опрокидывающий триггер 3 в противоположное состояние (в нашем примере - в единичное) . Это приводит к изменению на противоположное значение полярности напряжения питания, подаваемого от преобразователя 2 аналог - частота к тензодатчикам датчика 1 веса. Значение кода п выбирается таким, чтобы при принятой частоте f генератора 4 прямоугольных импульсов обеспечить прерывание цикла измерения на время о, достаточное для прекращения всех переходных процессов в датчике 1 веса и преобразователе 2 аналог - частота, вызванных переключением полярности напряжения питания тензодатчи- ков датчика I веса ( 20 мс) .
.(5)
В момент t (во второй счетчик таймера 5 поступило количество импульсов, равное заданному п) второй счетчик таймера 5 автоматически запирается, а на выходе Q таймера 5 вырабатывается единичный сигнал прерывания, который по линии связи 16 через интерфейс 8 ввода-вывода поступает в микропроцессорный вычислительный блок 7. По сигналу прерывания микропроцессорный вычислительный блок 7 через интерфейс 8 ввода-вывода выставляет на ША адрес первого счетчика таймера 5, а на ШД - начальный код п. Затем по сигналу Запись, поступающему в таймер 5 через интерфейс 8 ввода-вывода с микропроцессорного вычислительного блока 7, в первый счетчик таймера 5 с ШД переписывается код п, и первый счетчик таймера 5 открывается для счета (Начинается формирование второго интервала измерения tu)- Одновременно сигнал на выходе Q таймера 5 становится равным нулю и через инвертор 6 на разрешающий вход Pg третьего счетчика таймера 5 подается I единичный сигнал, который возбуждает счет третьего сче1чика таймера 5, т.е продолжается измерение выходного сиг- нала преобразователя 2 аналог - час- тота,
По истечению времени t у,, n,/f-p (ty ,) первый счетчик таймера 5 обнуляется (при этом он автоматически запирается) и на выходе Q тайме- ipa 5 вырабатывается единичный сигнал прерывания, который по линии связи 15 через интерфейс 8 ввода-вывода поступает в микропроцессорньп вычислитель- ньй блок 7 /момент i.,
Высокий уровень сигнала на выходе Q gj таймера 5 через инвертор 6 блокирует третий счетчик таймера 5, т.е. приостанавлийает его работу. При этом в счетчике будет зафиксирован код Ми, пропорциональный сигналу датчика 1 веса
Нц N + М , (6) где NJ t, f, t(j 1:„( ICM) - количество импульсов, поступивших от преобразователя 2 аналог - частота на Вход третьего счетчика таймера 5 в интервале
и
}
- полезный информационный сиг
нал датчика I веса в интервале времени измерения tm.
NU tu., Кр (Ugi+ ICM) + + tui K Ug,- 1,) ,, (Ug,-H -b ) (7)
Из выражения (7) следует, что изме- рение сигнала датчика I веса в течение времени t, + t ц 2tu, с переключением полярности напряжения питания теизодатчиков позволяет исключить влияние дрейфа нуля (разбаланса моста) тензодатчиков на значение N.
По сигналу прерьшания (момент tj-)-, поступившему через интерфейс 8 ввода- iвывода на третий вход микропроцессорного вычислительного блока 7 с выхода QJ таймера 5, микропроцессорный вы числительный блок 7 через интерфейс 8 ввода-вывода выставляет на ША адрес третьего счетчика таймера 5, а по ли, Q
0 5
о
5
нии связи 13 посыпает нулевой импульс Чтение на вход таймера 5. При этом содержимое третьего счетчика (N) таймера :5 по ШД переписывается в оперативную память ОЗУ микропроцессорного вычислительного блока 7 (линия связи 12), через интерфейс 8 ввода-вывода на счетный вход триггера 3 поступает импульс, опрокидывающий триггер 3 в противоположное состояние (на диаграмме - в нулевое), что вызывает изменение на противоположное полярности напряжения питания тензодатчиков датчика I неса.
Оставшееся до момента tg время (на диаграмме заштриховано) используется микропроцессорным вычислительным блоком 7 для обработки полученных результатов измерения сигнала датчика 1 веса и подготовки к новому циклу Т измерения, т.е. в микропроцессорном вычислительном блоке 7 вычисляется и запоминается в отдельной ячейке памяти ОЗУ произведение N t (Ьц ) , производится суммирование этого произведения со значением, ранее полученным в предьщугцем измерении.
В момент t начинается новый, аналогичный рассмотренному, цикл Т измерения и обработки сигнала датчика 1 веса.
В момент t (фиг. 2) через интерфейс 8 ввода-вывода на вход микропроцессорного вычислительного блока 7 поступает импульс с датчика 11 скорости, по которому в микропроцессорном вычислительном блоке 7 производится вычисление средней скорости Vjp ; и перемножение значения (.р/, на накоплен
ную сумму
j i
Ny-ty , где m - коли,чество циклов измерения Т, уложившихся в период времени .
I В результате масса груза М; перемещается конвейером за время и
определяется как m
н; K-Vcp,;
.
(8)
где К - коэффициент преобразования.
Полученное значение М; запоминается в ОЗУ микропроцессорного вычислительного блока 7 для последующего суммирования частичными массами.
Так как суммирование вычислительных значений масс производится периодически с частотой , то результирующая масса груза :„, перемещенная конвейером за время взвешивания J), равна
где
11
Р m Мр K lVcp pj,- t, (9)
- количество импульсов датчика 11 скорости, поступивших на вход микропроцессорного вычислительного
f блока 7 за время Т ).
-
Результат вычисления массы груза Мр из микропроцессорного вычислительного блока 7 через интерфейс 8 ввода-вывода поступает на индикатор результата взвешивания, по показани которого можно судить о массе груза перемещенного конвейером, или может поступать на исполнительные механизмы 10 для управления процессом дозирования транспортируемого конвейеро
материала.
Таким образом, предложенное устройство позволяет повысить точность измерения массы груза транспортируемого конвейером за счет устранения составляющей погрешности измерения, обусловленной дрейфом нуля датчик веса, возможности размещения преобр зователя аналогового сигнала в частту непосредственно у датчика веса, подключив его к таймеру через длинн линию связи, введения иных характеристик в процесс измерения. Использ вание устройства в дозаторах непрерного действия наряду с повышением тности, измерения снижает допустимую основную погрешность и потери дозиремого материала при подготовке процесса, уменьшает время выхода на установившийся режим. Формула изобретени
Устройство для измерения массы и управления потоком сыпучего материа
12
0
5
25 30 0
ла, содержащее микропроцессорный вычислительный блок с индикатором и выходом для подключения к исполнительному механизму управления, аналоговый датчик веса и датчик скорости, подключенный к первому входу вычислительного блока, отличающееся тем, что, с целью повьш ения точности, в него введены преобразователь аналог - частота, триггер, таймер с тремя счетчиками импульсов, генератор прямоугольных импульсов, инвертор и источник опорного напряжения, при этом выход генератора прямоугольных импульсов соединен с вторьш входом вычислительного блока и с информационными входами первого и второго счетчиков импульсов, разрешающие входы которых подключены к источнику опорного напряжения, выход первого счетчика импульсов подключен к третьему входу вычислительного блока и через инвертор - к разрешающему входу третьего счетчика импульсов, информационный вход которого соединен с первым выходом преобразователя аналог - частота, первый Еыход вычислительного блока соединен со счетным входом триггера, один из выходов которого подключен к управляющему входу преобразователя аналог - частота, информационный вход которого подсоединен к выходу датчика веса, второй и третий выходы вычислительного блока соединены соответственно с вхо- 35 дом Чтение и Запись таймера, шина данных и шина адреса которого соединены с соответствующими шинами вычислительного блока, четвертый вход которого подключен к вькоду второго счетчика импульсов.
40




| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения массы | 1986 |
|
SU1435950A1 |
| Конвейерные весы | 1987 |
|
SU1569574A1 |
| Автоматическое многоканальное тензометрическое устройство | 1980 |
|
SU932213A1 |
| Система управления автоматической трансмиссией транспортного средства | 1989 |
|
SU1731661A1 |
| Устройство для взвешивания автомобилей в движении | 1987 |
|
SU1432340A1 |
| Весы | 1989 |
|
SU1783314A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССОМ ДУГОВОЙ СВАРКИ НЕПЛАВЯЩИМСЯ ЭЛЕКТРОДОМ В СРЕДЕ ЗАЩИТНЫХ ГАЗОВ | 1991 |
|
RU2077415C1 |
| Устройство для контроля удароопасности массива горных пород по сигналам акустической эмиссии | 1989 |
|
SU1742475A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕСА ТРАНСПОРТНЫХ СРЕДСТВ | 1997 |
|
RU2116630C1 |
| Система для измерения массы проверяемых изделий | 1985 |
|
SU1303841A1 |
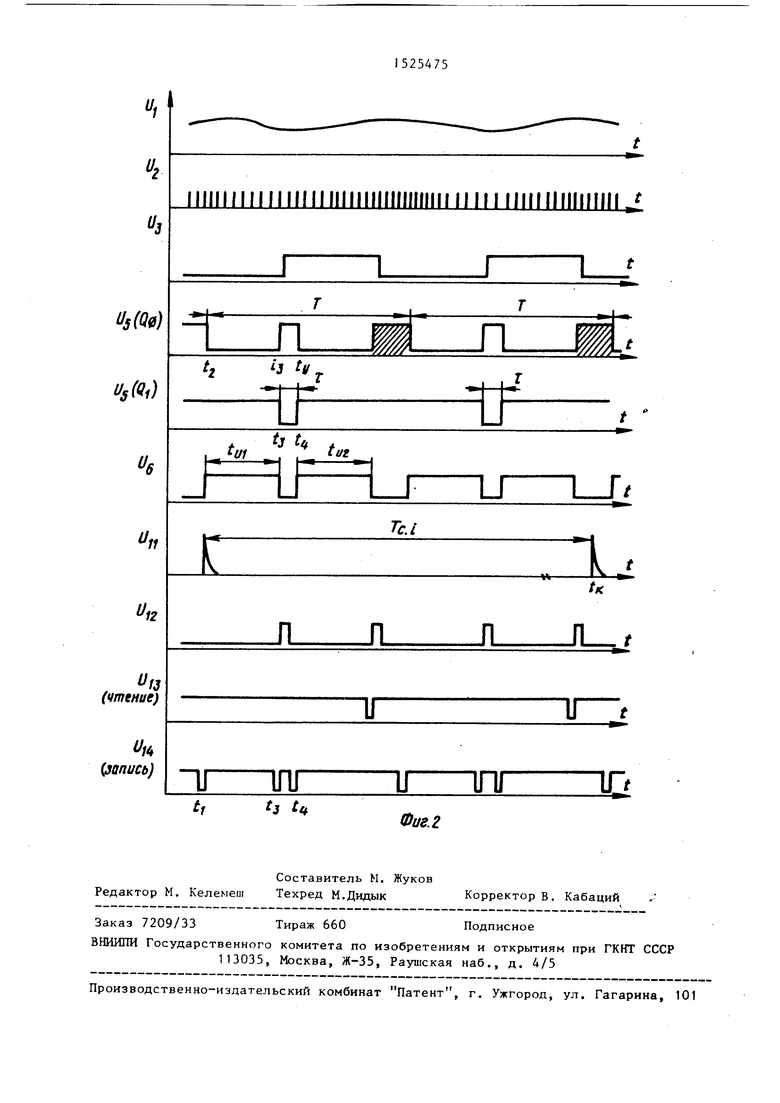
Изобретение относится к весоизмерительной технике и может быть использовано для измерения массы движущихся объектов или массы груза, транспортируемого конвейерами. Изобретение позволяет повысить точность измерения за счет компенсации дрейфа нуля датчика веса и повышения точности аналого-цифрового преобразования. Сигнал с датчика 1 веса поступает на информационный вход специализированного преобразователя 2 аналог-частота, с информационного выхода которого в течение времени TU1 и TU2 частотный сигнал проходит на третий счетчик таймера 5. Формирование одинаковых интервалов времени измерения TU1 и TU2 осуществляется первым счетчиком таймера 5, который заполняется импульсами генератора 4 под управлением микропроцессорного вычислительного блока 7. Причем для компенсации составляющей погрешности измерения, обусловленной дрейфом нуля датчика 1 веса, измерение сигнала датчика 1 веса в интервалах времени TU1 и TU2 производится при различной полярности напряжения питания тензодатчиков датчика 1 веса. Для этого устройство снабжено триггером 3, который переключается импульсами с микропроцессорного вычислительного блока 7 и изменяет уровень сигнала на управляющем входе преобразователя 2 аналог - частота, формирующего также напряжение питания для тензодатчиков датчика 1 веса. Второй счетчик таймера 5 формирует временной интервал τ (между TU1 и TU2), в течение которого на период переключения полярности напряжения питания тензодатчиков прекращается измерение сигнала датчика 1 веса. Зафиксированный за время измерения TU1 + TU2 в третьем счетчике таймера 5 код NU, пропорциональный сигналу датчика 1 веса, обрабатывается далее в микропроцессорном вычислительном блоке 7. 2 ил.
| Управляемая микропроцессором система измерения и регулирования для весов непрерьюного действия типа MIC- ROCONTFCO | |||
| Перевод с нем | |||
| Механизм для передвигания приводных ремней | 1928 |
|
SU9265A1 |
| М., 1983 | |||
| Конвейерные весы | 1981 |
|
SU979879A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
