Изобретение относится к вычислительной технике, а именно к технике аналогового моделирования систем эстремального регулирования.
Целью изобретения является повышение точности регулирования.
На чертеже приведена принципиальная схема системы,
Система содержит интегратор 1, объект регулирования 2, датчик экстремума 3, первое и второе запоминающие устройства 4 и 5, первый и второй компараторы 6 и 7, логический элемент 8 и элемент задержки 9.
Логический элемент 8 реализован
на RS-триггере. I
Исходное состояние регулятора характеризуется случайной совокупностью знаков напряжений начальных условий на выходе интегратора 1 и логического элемента 8. Знак напряжения на.выходе элемента задержки 9 не совпадает со знаком напряжения на выходе RS-триггера логического элемента 8. В соответствии со знаком напряжения на выходе элемента 9 одно из запоминающих устройств включается в режим запоминания (то, у которого сбросовый ключ разомкнут), а второе - в режим слежения (то, у которого сбросовый ключ замкнут). При включении регулятора в работу независимо от описанной случайной ситуации возможно существование не более одного неверного поискового движения.
В режиме нормальной работы система представляет генератор колебаний выходной величины объекта вокруг ее экстремального значения. В общем случае объект инерционен, поэтому после реверса интегратора его выходная величина продолжает некоторое время уменьшаться (рассматривается объект с характеристикой типа экстремум-максимум) .
Пусть до момента времени t,, на выходе RS-триггера присутствует положительное напряжение, а на выходе элемента задержки 9 - отрицательное. Запоминающее устройство 4 находится на режиме слежения за изменением выходного сигнала объекта, снимаемого с первого выхода датчика экстремума 3, причем запоминающее устройство 5 работает в режиме запоминания того же сигнала. После прохождения промежуточного максимума характеристика объекта на выход запоминающего уст
5
0
5
0
5
ройства 5 остается неизменной, а сигнал на втором выходе датчика 3 начинает уменьшаться. В момент tg эти сигналы сравниваются и компаратор 7 формирует положительный управляющий сигнал RS-триггера логического элемента 8. Последний переключается и интегратор 1 изменяет направление псЗиска экстремума объекта на обратное. До изменения полярности напряжения на выходе элемента задержки 9 сохраняются прежние режимы устройств 5 и 6. Время задержки элемента 9 должно быть выбрано так, чтобы при заданной .инерционности объекта переключение запоминающих устройств 4 и -5 произошло позже момента времени, соответствующего наименьшему значению выходного сигнала объекта.
Пусть переключение запоминающих устройств 4 и 5 происходит в момент времени t. Запоминающее устройство 5 работает в режиме слежения, а устройство 6 - в режиме запоминания. В этот же момент t напряжение на втором выходе датчика 2 сравнивает- |Ся с напряжением на выходе запоминающе го, устройства 4 и компаратор 6 вырабатывает управляющий сигнал для .логического элемента 8, который возвращается в первоначальное состояние . Далее логика функционирования
повторяется.
Формула изобретения
Система экстремального регулирования, содержащая интегратор, подключенный выходом к входу объекта регулирования, выход которого через датчик экстреуума соединен с входами первого и второго запоминаюш 1Х устройств, выходы которых подключены к первым входам первого и второго компараторов соответственно, вторые входы первого и второго компараторов соединены с вторыми выходами датчика экстремума, первый и второй входы логического элемента соединены с выходами первого и второго компараторов соответственно, выход логического элемента соединен с входом интегратора, отличающаяся тем, что,, с целью повьщгения точности регулирования, в систему введен элемент задержки, а логический элемент реализован на RS-триггере, причем
мент задержки соединен с управляюпоминающих устройств.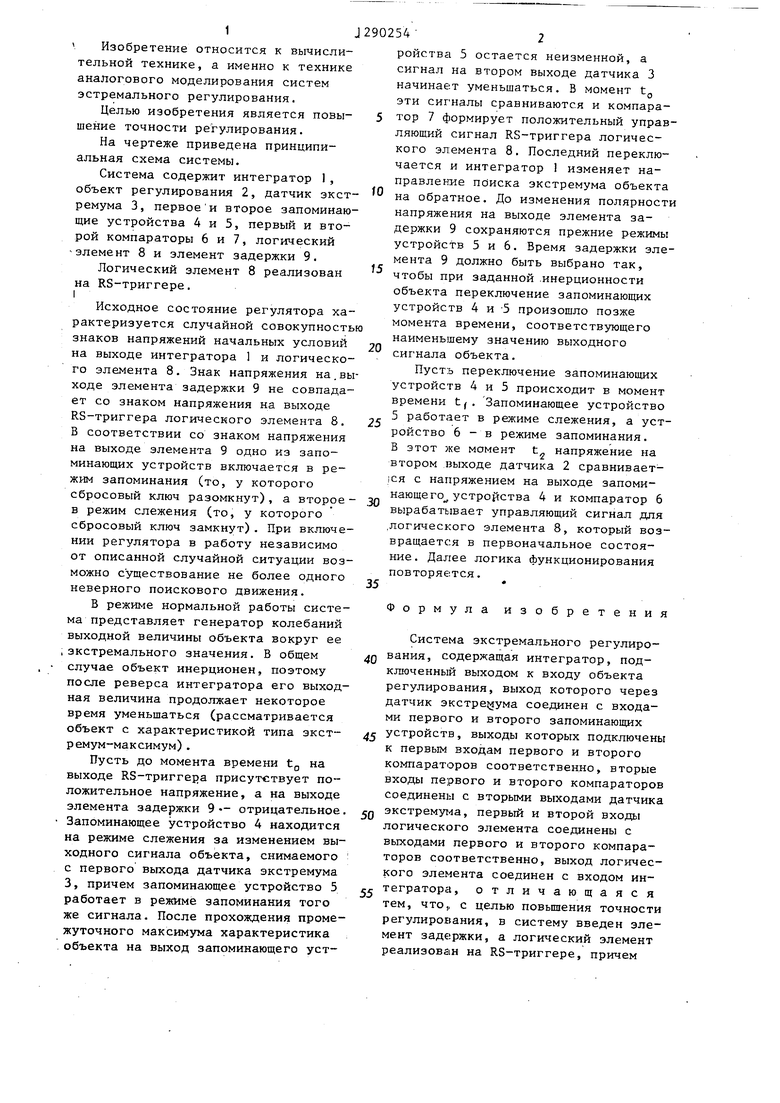
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО И СПОСОБ АВТОМАТИЧЕСКОГО ПОДАВЛЕНИЯ ВИБРАЦИИ ПОМОЛЬНО-СМЕСИТЕЛЬНОГО АГРЕГАТА | 2015 |
|
RU2600688C1 |
| Экстремальный регулятор | 1981 |
|
SU974340A1 |
| Система экстремального регулирования квадрупольного масс-спектрометра | 1989 |
|
SU1795419A1 |
| Способ управления в пьезополупроводниковых преобразователях и устройство для его осуществления | 1977 |
|
SU739500A1 |
| СПОСОБ ПОИСКА ЭКСТРЕМУМА БЕЗЫНЕРЦИОННЫХОБЪЕКТОВ | 1971 |
|
SU289397A1 |
| Способ управления рабочим процессом бульдозера | 1985 |
|
SU1328449A1 |
| Экстремальный регулятор | 1974 |
|
SU507858A1 |
| Устройство для выделения и анализа R-зубцов электрокардиосигнала | 1986 |
|
SU1364298A1 |
| Устройство для определения экстремумов электрического сигнала | 1988 |
|
SU1645940A1 |
| Система экстремального регулирования | 1985 |
|
SU1352452A1 |

Изобретение относится к вычислительной технике, а именно к поисковым системам экстремального регулирования. Цель изобретения - повыше- ние точности регулирования. Система содержит интегратор, датчик экстремума, первым выходом подключенный к входам первого и второго запоминающих устройств, а вторым выходом - к вторым входам компараторов, первые входы которых соединены с выходами первого и второго запоминающих устройств соответственно. Выходы компараторов подключены к входам логического элемента, выходом соединенного с входом интегратора, и через элемент задержки к управляющим входам запоминающих устройств. При этом логический элемент вьшолнен на основе RS-триггера. 1 ил. о 3 сл
| Система экстремального регулирования | 1976 |
|
SU673982A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Самонастраивающиеся системы /Под ред | |||
| П.И | |||
| Чинаева | |||
| Киев: Наукова думка, 1969, с | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Насос | 1917 |
|
SU13A1 |
