Изобретение относится к электротехнике и может быть использовано на транспорте.
Цель изобретения - повышение надежности в тормозном режиме.
На фиг. 1 представлена принципиальная блок-схема частотно-регулируемого электропривода автономного транспортного средства; на фиг. 2 - блок-схема регулятора тормозного момента.
Частотно-регулируемый электропривод автономного транспортного средства (фиг. 1) содержит асинхронный короткозамкнутый двигатель 1, подключенный через автономный инвертор 2 с емкостным фильтром 3 на входе к источнику 4 постоянного тока, датчик 5 тока автономного инвертора, подключенный к автономному инвертору блок 6 тормозных резисторов с датчиком 7 напряжения, датчик 8 скорости асинхронного двигателя, датчик 9 напряжения на входе автономного инвертора, блок 10 управления и регулятор 11 тока автономного инвертора, сумматор 12, выход которого соединен с входом блока 10 управления автономным инвертором, а один из входов - с выходом сумматора 13, один из входов которого соединен с выходом функционального преобразователя 14 скольжения, функциональный преобразователь 15 тока автономного инвертора, выполненный на соединенных последовательно блоке 16 умножения и усилителе 17, регулятор 18 тормозного момента, входы а, б, в которого соответственно соединены с выходами блока 19 задания тормозного момента, датчика 8 скорости асинхронного двигателя и блока 20 выделения максимального сигнала, соединенного входами с выходами датчиков потока 21 асинхронного двигателя, напряжения 9 на входе автономного инвертора и напряжения 7 блока тормозных резисторов, причем выход датчика 8 скорости асинхронного двигателя соединен с другим входом сумматора 12, входом функционального преобразователя 14 скольжения и одними из входов функционального преобразователя 15 тока автономного инвертора и регулятора 11 тока автономного инвертора, другие входы последнего из которых соединены с выходами датчика 5 тока автономного инвертора и функционального преобразователя 15 тока автономного инвертора, а выход - к второму входу сумматора 13, третий вход которого соединен с выходом регулятора 18 тормозного момента. Другой вход функционального преобразователя 15 тока автономного инвертора соединен с выходом блока 19 задания тормозного момента, а вход усилителя 17 и другой вход и выход блока 16 умножения являются соответственно одними и другим входами и выходом функционального преобразователя 15 тока автономного инвертора.
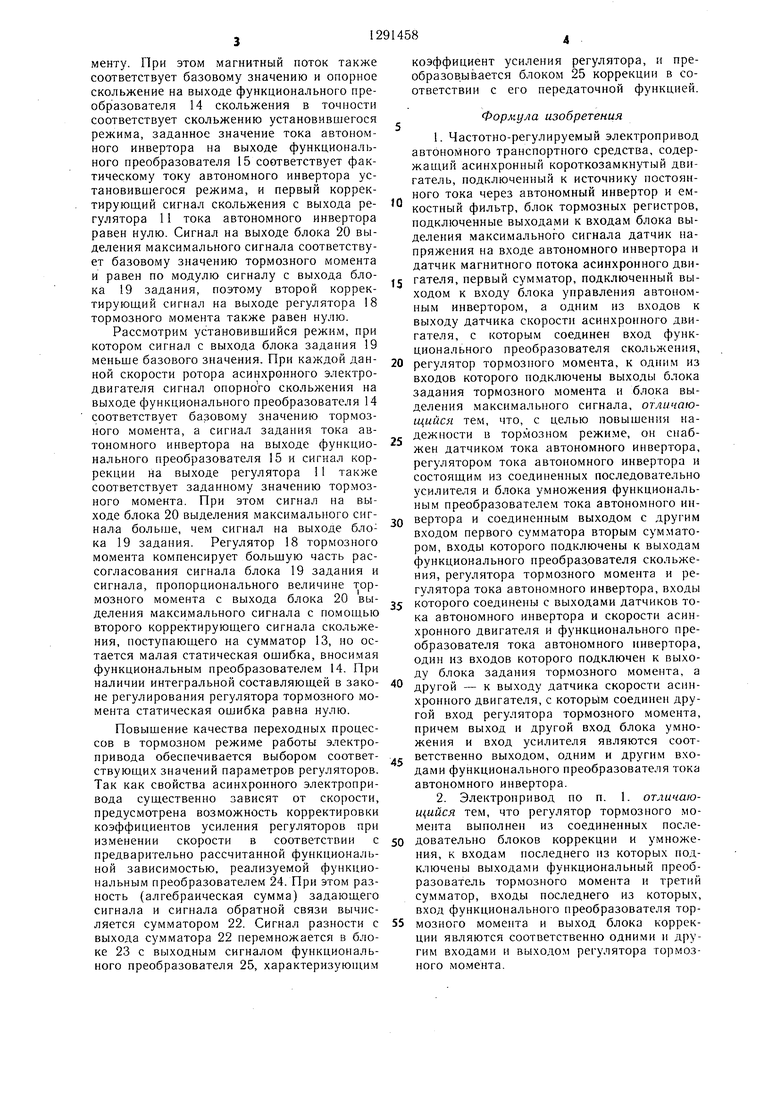
Регулятор 18 тормозного .момента (фиг. 2) содержит сумматор 22, выход которого соединен с одним из входов блока 23 умножения, другой вход которого
подключен к выходу функционального преобразователя 24 тормозного момента, а выход - к входу блока 25 коррекции, причем входы сумматора 22, вход функционального преобразователя 24 тормозного момента и выход блока 25 коррекции яв ляются соответственно входами а, в, б, и выходом регулятора 18 тормозного момента. Частотно-регулируемый электропривод автономного транспортного средства работает следующим образом.
, Управление тормозным режимом осуществляется регулированием частоты -переключения тиристоров инвертора. Частота переключения формируется как сумма частоты вращения двигателя и частоты скольжения. Управляющая частота скольжения
0 формируется как сумма опорного сигнала, зависящего от скорости и снимаемого с выхода функционального преобразователя скольжения, настроенного на базовое значение тормозного момента, и двух корректирующих сигналов, один из которых поступает с выхода регулятора 11 тока автономного инвертора, а другой - с выхода регулятора 18 тормозного момента.
На вход а регулятора тормозного момента поступает задающий сигнал с выхода
Q блока 19, а на вход в - сигнал с вы- ,хода блока 20 выделения максимального сигнала. На входы блока 20 подаются нормированные сигналы с выхода одного из датчиков 9 или 7 напряжения и с выхода датчика 21 магнитного потока асинхронного двигателя. Блок 20 пропускает на выход максимальный из двух сигналов. Если на входах блока 20 присутствуют сигналы, соответствующие базовым величинам магнитного потока и напряжения, то на выходе блока 20 присутствует сигнал,
0 соответствующий базовому значению тормозного момента.
В первой зоне при скоростях асинхронного двигателя, меньших номинальной, на выходе блока 20 присутствует сигнал; соответствующий магнитному потоку, и регулятор 18 функционирует как регулятор потока. Во второй зоне при скоростях выше номинальной на выходе блока 20 действует сигнал, соответствующий напряжению статора, и регулятор 18 выполняет
0 функцию регулятора напряжения.
Функциональный преобразователь 15 тока автономного инвертора, формирующий заданное значение тока инвертора, является преобразователем двух входных сигналов, и ошибка задания на его выходе, неза5 висимо от режима работы, мала.
Рассмотрим установившийся режим, при котором сигнал с выхода блока 19 задания соответствует базовому тормозному моменту. При этом магнитный поток также соответствует базовому значению и опорное скольжение на выходе функционального преобразователя 14 скольжения в точности соответствует скольжению установившегося режима, заданное значение тока автономного инвертора на выходе функционального преобразователя 15 соответствует фактическому току автономного инвертора установившегося режима, и первый корректирующий сигнал скольжения с выхода регулятора 11 тока автономного инвертора равен нулю. Сигнал на выходе блока 20 выделения максимального сигнала соответствует базовому значению тормозного момента и равен по модулю сигналу с выхода блока 19 задания, поэтому второй корректирующий сигнал на выходе регулятора 18 тормозного момента также равен нулю.
Рассмотрим установившийся режим, при котором сигнал с выхода блока задания 19 меньше базового значения. При каждой данной скорости ротора асинхронного электродвигателя сигнал опорного скольжения на выходе функционального преобразователя 14 соответствует базовому значению тормозного момента, а сигнал задания тока автономного инвертора на выходе функционального преобразователя 15 и сигнал коррекции на выходе регулятора 11 также соответствует заданному значению тормозного момента. При этом сигнал на выходе блока 20 выделения максимального сигнала больше, чем сигнал на выходе блока 19 задания. Регулятор 18 тормозного момента компенсирует большую часть рассогласования сигнала блока 19 задания и сигнала, пропорционального величине тормозного момента с выхода блока 20 выделения максимального сигнала с помощью второго корректирующего сигнала скольжения, поступающего на сумматор 13, но остается малая статическая ошибка, вноси.мая функциональным преобразователем 14. При наличии интегральной составляющей в законе регулирования регулятора тормозного момента статическая ошибка равна нулю.
Повышение качества переходных процессов в тормозном режиме работы электропривода обеспечивается выбором соответствующих значений параметров регуляторов. Так как свойства асинхронного электропривода существенно зависят от скорости, предусмотрена возможность корректировки коэффициентов усиления регуляторов при изменении скорости в соответствии с предварительно рассчитанной функциональной зависимостью, реализуемой функциональным преобразователем 24. При этом разность (алгебраическая сумма) задающего сигнала и сигнала обратной связи вычисляется сумматором 22. Сигнал разности с выхода сумматора 22 перемножается в блоке 23 с выходным сигналом функционального преобразователя 25, характеризуюп1им
коэффициент усиления регулятора, и преобразовывается блоком 25 коррекции в соответствии с его передаточной функцией.
Формула изобретения
. Частотно-регулируемый электропривод автономного транспортного средства, содержащий асинхронный короткозамкнутый двигатель, подключенный к источнику постоянного тока через автономный инвертор и ем- костный фильтр, блок тормозных регистров, подключенные выходами к входам блока выделения максимального сигнала датчик напряжения на входе автономного инвертора и датчик магнитного потока асинхронного дви5 гателя, первый сумматор, подключенный выходом к входу блока управления автономным инвертором, а одним из входов к выходу датчика скорости асинхронного двигателя, с которым соединен вход функционального преобразователя скольжения,
0 регулятор тормозного момента, к одним из входов которого подключены выходы блока задания тормозного момента и блока выделения максимального сигнала, отличающийся тем, что, с целью повышен1 я на дежности в тормозном режиме, он снабжен датчиком тока автономного инвертора, регулятором тока автономного инвертора и состоящим из соединенных последовательно усилителя и блока умножения функциональным преобразователем тока автономного ин0 вертора и соединенным выходом с другим входом первого сумматора вторым сумматором, входы которого подключены к выходам функционального преобразователя скольжения, регулятора тормозного момента и регулятора тока автономного инвертора, входы
которого соединены с выходами датчиков тока автономного инвертора и скорости асинхронного двигателя и функционального преобразователя тока автономного инвертора, один из входов которого подключен к выходу блока задания тормозного момента, а другой - к выходу датчика скорости асинхронного двигателя, с которым соединен другой вход регулятора тормозного момента, причем выход и другой вход блока умножения и вход усилителя являются соот, ветственно выходом, одним и другим входами функционального преобразователя тока автономного инвертора.
2. Электропривод по п. 1. отличающийся тем, что регулятор тормозного момента выполнен из соединенных после0 довательно блоков коррекции и умножения, к входам последнего из которых подключены выходами функциональный преобразователь тормозного момента и третий сумматор, входы последнего из которых, вход функционального преобразователя тор5 мозного момента и выход блока коррекции являются соответственно одними и другим входами и выходом регулятора тормозного мо.мента.
0
| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-регулируемый электропривод | 1982 |
|
SU1023606A1 |
| РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2002 |
|
RU2226739C2 |
| АСИНХРОННЫЙ ВЕНТИЛЬНЫЙ КАСКАД | 2011 |
|
RU2474951C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД С АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 2006 |
|
RU2358382C2 |
| Устройство для управления асинхронным электродвигателем | 1989 |
|
SU1663734A1 |
| Частотно-регулируемый электропривод | 1979 |
|
SU826543A1 |
| Частотно-регулируемый электропривод переменного тока | 1980 |
|
SU892635A1 |
| Частотнорегулируемый электропривод | 1985 |
|
SU1292156A1 |
| Регулируемый асинхронный электропривод | 1981 |
|
SU955483A1 |
Изобретение относится к электротехнике и предназначено для .повышения надежности в работе электрооборудования в тормозном режиме. Частотно-регулируемый электропривод содержит асинхронный ко- роткозамкнутый двигатель 1, подключенный через автономный инвертор 2 к источнику 4 постоянного тока, блок 10 управления автономным инвертором, вход которого подключен к выходу сумматора 12, соединенного входами с выходами датчика 8 скорости асинхронного двигателя и сумматора 13, входы которого подключены к выходам функционального преобразователя 14 скольжения, регулятора 11 тока автономного инвертора и регулятора 18 тормозного момента, входы которого соединены с выходами блока 19 задания тормозного момента, датчика 8 скорости и блока 20 выделения максимального сигнала, соединенного входами с выходами датчика 9 напряжения на входе автономного инвертора и датчика 21 потока асинхронного двигателя. Причем к входа.м регулятора I I подключены выходы датчика 5 тока и функционального преобразователя 15 тока автономного инвертора, входы которого подключены к выходам датчика 8 скорости и блока 19. 1 з.п. ф., 2 ил. ю (Л с 1чЭ со 4:: СП 00 WJEU
| Ударный механизм гайковерта | 1982 |
|
SU1079423A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
