рамнике 8. На раме 2 шарнирно.установлены криволинейные направляюпше 10 для взаимодействия с роликами 11, установленными на подрамнике. Форма криволинейных направляющих выбрана таким образом, чтобы при движении по ним ролика 11 центр масс контейнера 12 с грузом перемещался по прямой, расположенной под углом, тангенс которого равен коэффициенту трения роликов по криволинейным направляю1
Изобретение относится к погрузочной технике и может быть использовано для погрузки грузов в крытые помещения, преимущественно в крытые товарные вагоны.
Цель изобретения - снижение энергоемкости.
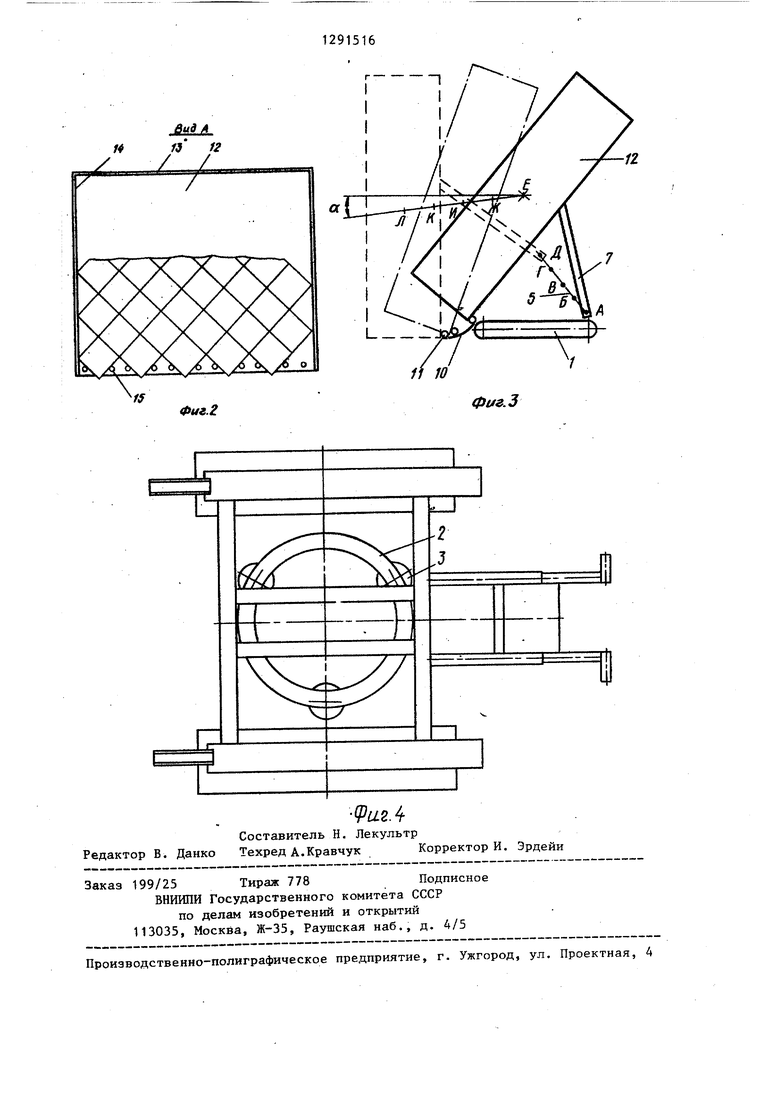
На фиг. 1 дано устройство, общий вид; на фиг. 2 - вид А на фиг. 1 (с грузом); на фиг. 3 - кинематическая схема передвижения контейнера по направляющим; на фиг. 4 - устройство вид сверху (без контейнера).
Устройство для погрузки грузов в крытые помещения содержит ходовую опопу 1, на которой посредством поворотного устройства 2 с пневмодом- кратом 3 установлена рама 4 с жестко закрепленными на ней направляющими 5, на которых установлено с возможностью перемещения колесо 6, связанное с тягой 7, жестко закрепленной на подрамнике 8. На раме 4 посредством шарнира 9 установлены криволинейные направляющие 10 для взаимодействия с роликами 11, установленными на подрамнике 8, на котором установлен съемный контейнер 12 с задней 13 и боковыми 14 стенками и нижними штырями 15. Для фиксации контейнера на подрамнике установлены фиксаторы 16. На криволинейных направ- ляницих 10 установлены дополнительные ролики 17.
Для обеспечения плавности движения контейнера и облегчения его разгрузки необходимо контейнер с грузом перемещать по такой траектории, когда положение контейнера с грузом больше всего соответствовало бы полощим, что дает возможность перемещать контейнер с грузом с наименьшим усилием, который проходит через точки пересечения радиуса, равного расстоянию от центра ролика до центра кол ё са во всех его положениях на указанной направляющей 5 с радиусом, равньм расстоянию от центра ролика до центра масс подрамника с грузом в соответствующих его положениях на указанной прямой. 1 з.п. ф-лы, 4 ил.
5
0
5
0
5
0
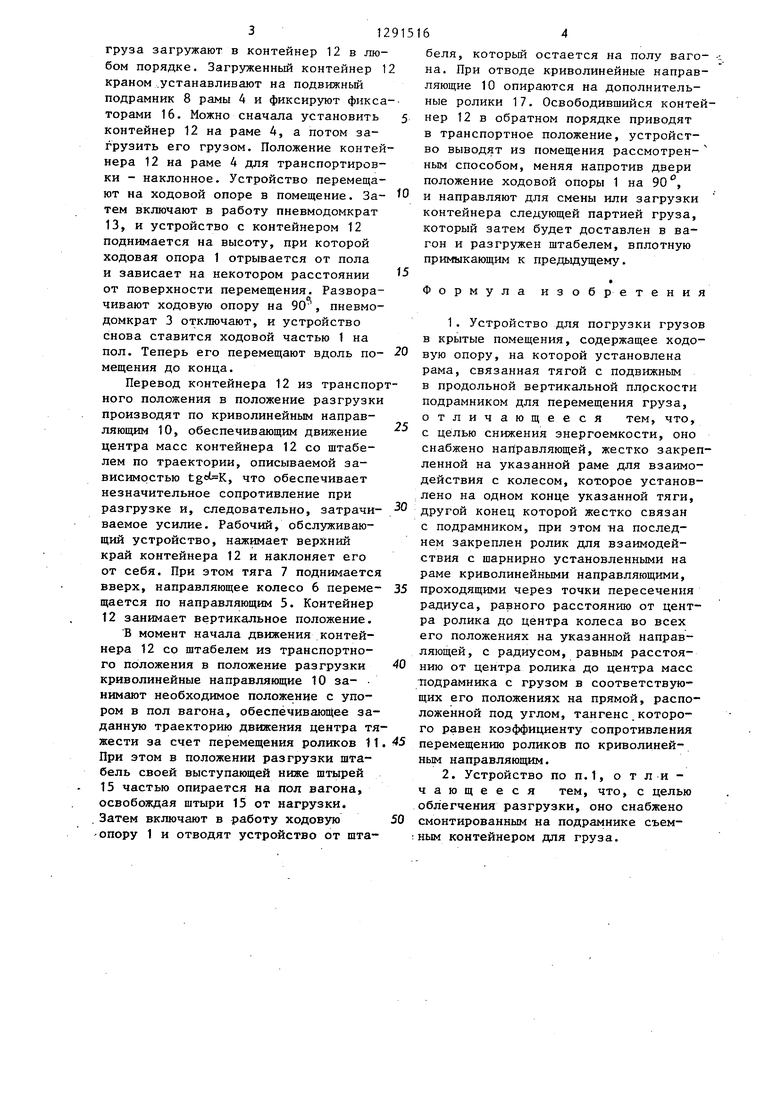
жению его безразличного равновесия, т.е. когда контейнер с грузом в любой точке траектории будет находиться в положении покоя, если к нему не будет приложена внешняя сила, либо будет перемещаться с постоянной скоростью, если ему будет сообщен импульс силы. Такая траектория центра масс контейнера с грузом определяется зависимостью , где К - коэффициент сопротивления перемещению роликов 11 по криволинейным направляющим 10.
Для построения криволинейных направляющих берут два радиуса: R - равный расстоянию от оси колеса 6 до оси ролика 11 и R 2 равный расстоянию от-центра масс контейнера с грузом до оси ролика 11.
Далее на направляющих 5 берут точки А, Б, Б, Г, Д положения коле- са 6 при перемещении подрамника и находят верхнюю точку положения центра масс контейнера с грузом и прямой, направленной под углом, тангенс которого равен коэффициенту сопротивления, находят соответствующие положения центра масс контейнера с грузом Е, Ж, И, К и Л, далее строят криволинейные направляющие по точкам пересечения К из точек А, Б, В, Г, Д и R , из точек Е, Ж, И, К, Л.
Устройство работает следующим образом.
Груз загружают в контейнер 12. ,Причем первый ряд укладывают так, чтобы пакет оперся на два соседних штыря 15 и одновременно какой-то своей частью провис между штырями 15 и ниже их. Следующие ряды пакетов
31
груза загружают в контейнер 12 в любом порядке. Загруженный контейнер краном .устанавливают на подвижньй подрамник 8 рамы 4 и фиксируют фиксаторами 16. Можно сначала установить контейнер 12 на раме 4, а потом загрузить его грузом. Положение контейнера 12 на раме 4 для транспортировки - наклонное. Устройство перемещают на ходовой опоре в помещение. За- тем включают в работу пневмодомкрат 13, и устройство с контейнером 12 поднимается на высоту, при которой ходовая опора 1 отрывается от пола и зависает на некотором расстоянии от поверхности перемещения. Разворачивают ходовую опору на 90, пневмодомкрат 3 отключают, и устройство снова ставится ходовой частью 1 на пол. Теперь его перемещают вдоль по- мещения до конца.
Перевод контейнера 12 из транспорного положения в положение разгрузки производят по криволинейным направ
ляющим 10, обеспечивающим движение центра масс контейнера 12 со штабелем по траектории, описываемой зависимостью , что обеспечивает незначительное сопротивление при разгрузке и, следовательно, затрачи- ваемое усилие. Рабочий, обслуживающий устройство, нажимает верхний край контейнера 12 и наклоняет его от себя. При этом тяга 7 поднимается вверх, направляющее колесо 6 переме- щается по направляющим 5. Контейнер 12 занимает вертикальное положение. В момент начала движения контейнера 12 со штабелем из транспортного положения в положение разгрузки криволинейные направляющие 10 за- нимают необходимое положение с упором в пол вагона, обеспечивающее заданную траекторию движения центра тяжести за счет перемещения роликов 11 При этом в положении разгрузки штабель своей выступающей ниже штырей 15 частью опирается на пол вагона, освобождая штыри 15 от нагрузки. Затем включают в работу ходовую -опору 1 и отводят устройство от шта64
беля, которьш остается на полу вагона. При отводе криволинейные направляющие 10 опираются на дополнительные ролики 17. Освободившийся контейнер 12 в обратном порядке приводят в транспортное положение, устройство выводят из помещения рассмотрен- ным способом, меняя напротив двери положение ходовой опоры 1 на 90, и направляют для смены или загрузки контейнера следующей партией груза, который затем будет доставлен в вагон и разгружен штабелем, вплотную примыкающим к предыдущему.
Формула изобретения
1.Устройство для погрузки грузов в крытые помещения, содержащее ходовую опору, на которой установлена рама, связанная тягой с подвижным
в продольной вертикальной плрскости подрамником для перемещения груза, отличающееся тем, что, с целью снижения энергоемкости, оно снабжено направляющей, жестко закрепленной на указанной раме для взаимодействия с колесом, которое установлено на одном конце указанной тяги, другой конец которой жестко связан с подрамником, при этом на последнем закреплен ролик для взаимодействия с шарнирно установленными на раме криволинейными направляющими, проходящими через точки пересечения радиуса, равного расстоянию от центра ролика до центра колеса во всех его положениях на указанной направляющей, с радиусом, равным расстоянию от центра ролика до центра масс подрамника с грузом в соответствующих его положениях на прямой, расположенной под углом, тангенс,которого равен коэффициенту сопротивления перемещению роликов по криволинейным направляющим.
2.Устройство по п.1, о т л и - чающееся тем, что, с целью облегчения разгрузки, оно снабжено смонтированным на подрамнике съемным контейнером для груза.
Фиг.2
.
фие.З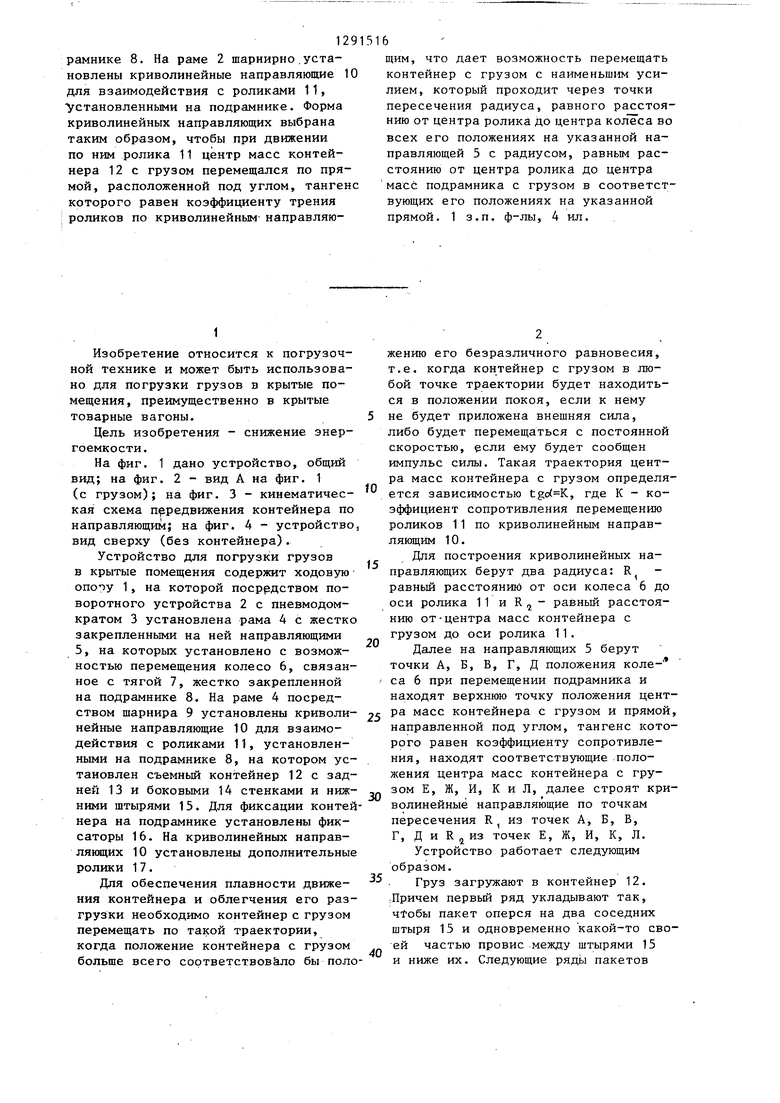
Изобретение относится к погрузочной технике и может быть использовано для погрузки грузов в крытые помещения, преимущественно в крытые товарные вагоны. Цель изобретения - снижение энергоемкости. Устройство для погрузки в крытые помещения содержит ходовую опору 2, на которой посредством поворотного устройства 3 установлена рама 4 с направляющей 5, на которой установлено с возможностью перемещения колесо 6, связанное с тягой 7, жестко закрепленной на подW; (Л ю QO сл О)
kJ
г
.3
.J
Редактор В. Данко
Составитель Н. Лекультр
Техред А.Кравчук Корректор И. Эрдейи
Заказ 199/25 Тираж 778Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
fPusA
| СПОСОБ ПРОГНОЗИРОВАНИЯ РИСКА РАЗВИТИЯ ОСЛОЖНЕНИЙ У ПАЦИЕНТОВ С ТРАВМОЙ КОСТЕЙ ТАЗА | 2010 |
|
RU2430377C1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
