to
N4;
4i
Изобретение относится к подъемно-транспортной технике, а именно к устройствам для погрузки штучных грузов в крытый железнодорожный вагон.
Известно устройство для погрузки штучных грузов в вагон, содержапдее опирающуюся на ходовые колеса самоходную платформу с грузовой рамой, несущей рабочий стол, привод подъема и опускания последнего 1.
Недостатком известного устройства является то, что с его помощью нельзя производить загрузку пространства против дверного проема вагона, а значительные боковые зазоры между устройством и стенкой вагона ведут к его недогрузке.
Цель изобретения - повыщение производительности.
Поставленная цель достигается тем, что устройство для погрузки щтучных грузов в вагон, содержащее опирающуюся на ходовые колеса самоходную платформу с грузовой рамой, несущей рабочий стол, привод подъема и опускания последнего, снабжено устанавливаемой перпендикулярно к продольной оси вагона рамой с направляющими, подвижной рамой с направляющими, смонтированными на платформе катками, кареткой с направляющими для последних и съемными направляющими, устанавливаемыми Б вагоне параллельно его продольной оси, причем каретка выполнена с поворотным вокруг своей Е ертикальной оси от привода круго.м, а каретка и подвижная рама установлены с возможностью перемещения приводом соответственно по направляющим подвижной рамы и рамы.
Кроме того, привод поворота круга может быть выполнен в виде с.монтированной на последнем поворотно выдвижной полумуфты сцепления для взаимодействия с установленной на раме полумуфтой.
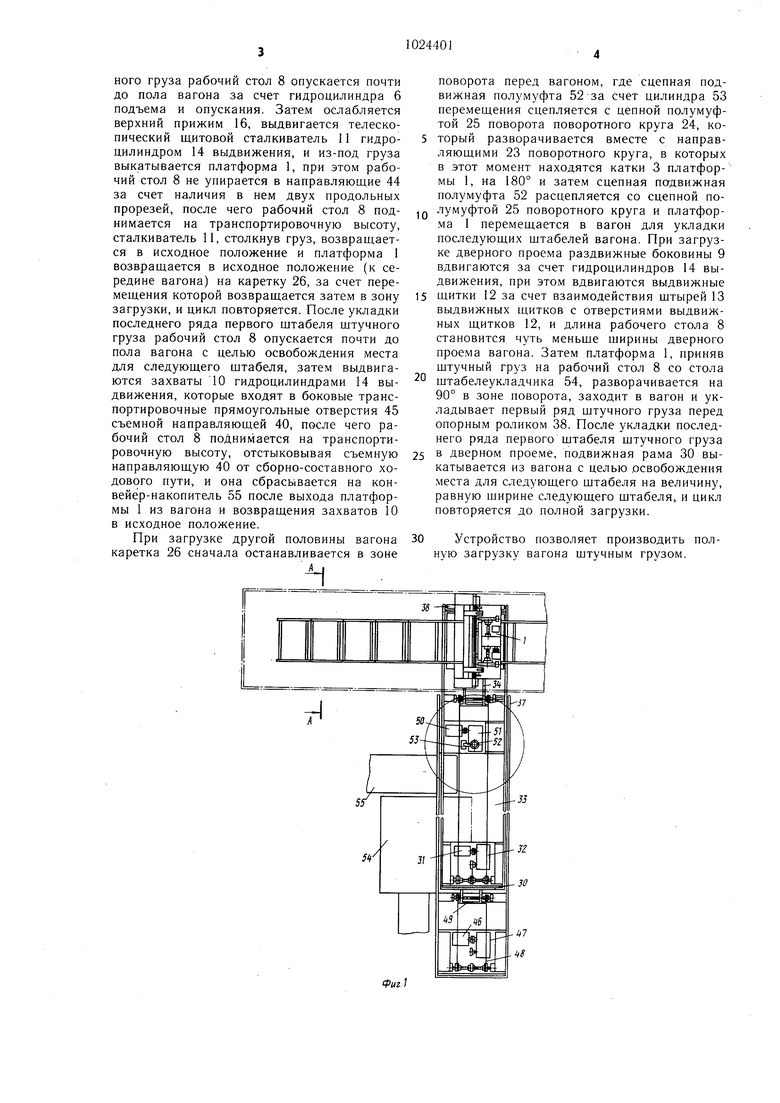
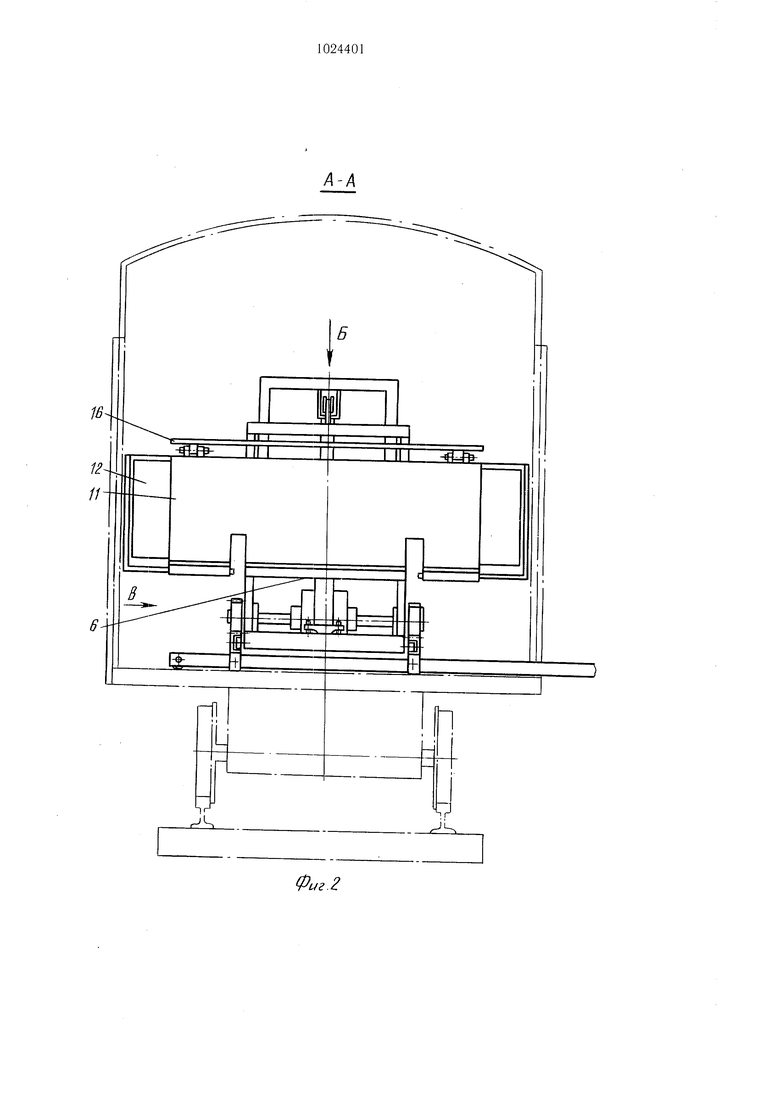
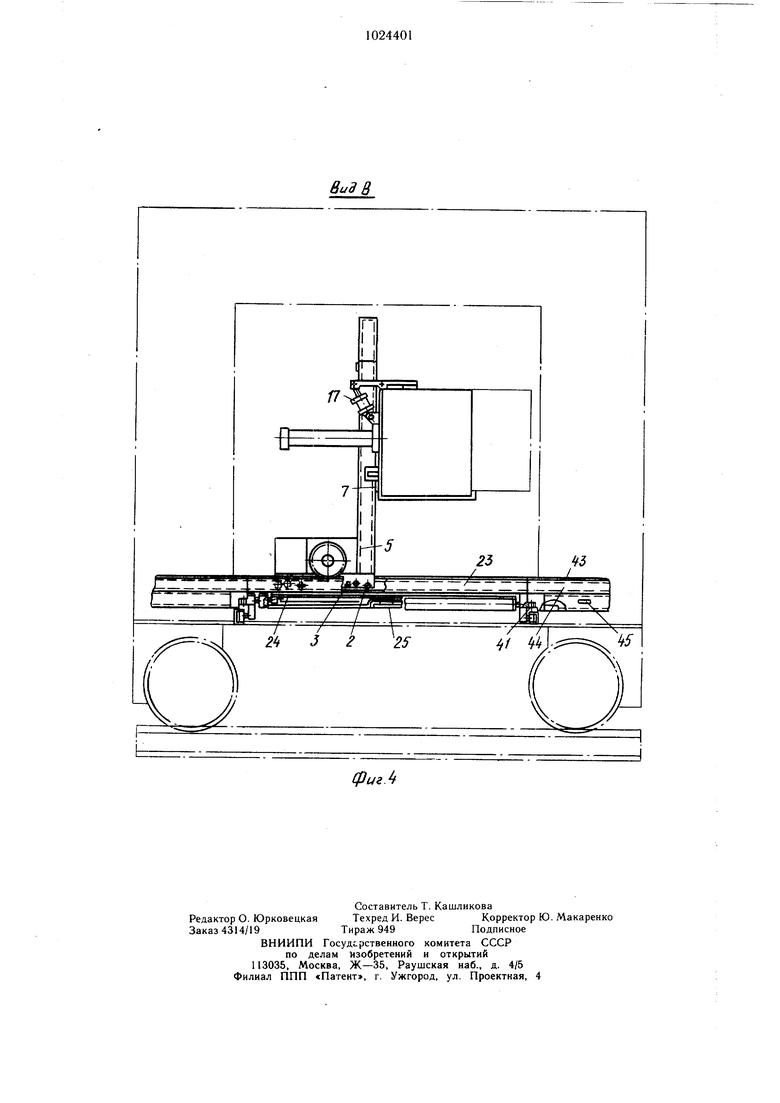
На фиг. 1 изображено устройство, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 -- вид Б на фиг. 2; на фиг. 4 - вид В на фиг. 2.
Устройство для погрузки щтучных грузов содержит платформу 1 с ходовыми колесами 2 и катками 3, на которой установлен гидронасос 4, грузовая рама 5 с гидроцилиндром 6 подъема и опускания и грузовой кареткой 7, на которой установлен рабочий стол 8, состоящий из раздвижных боковин 9 с захвата.ми И), телескопического щитового сталкивателя 11 с выдвижными щитками 12, щтырей 13 выдвижения щитков, гидроцилиндра 14 выдвижения, гидроцилиндров 15 сталкивателя, верхнего прижима 16 с гидроцилиндром 17 прижи.ма. Перемещение платформы 1 осуществляется от гидромотора 18 через редуктор 19 и приводные валы 20 с зубчатыми колесами 21, находящимися в зацеплении с зубчатыми рейка.ми 22, которые закреплены на направляющих 23 -образного сечения, последние в свою очередь, закреплены на поворотно.м круге 24 для взаимодействия с ходовыми колесами 2 и катка.ми 3 платформы 1. Поворотный круг 24, имеющий сцепную полумуфту 25 поворота, закреплен на каретке 26, которая имеет боковые катки 27 и опорные катки 28, взаимодействующие с направляющими 29 -образного сечения подвижной рамы 30. Каретка 26 приводится в движение электродвигателем 31 через редуктор 32 и цепную передачу 33, которые сцеплены с тягой 34. Подвижная рама 30 имеет боковые катки 35 и опирается на опорные катки 36, взаимодействующие с направляющими -образного сечения рамы 37, установ 1енной рядом с
5 вагоном, опорный ролик 38, взаимодействующий с полом вагона, и стыковке опоры с прямоугольными отверстиями 39, взаимодействующие со съемными направляющими 40. Съемные направляющие 40 имеют прямоугольные щтыри 41 с одной стороны
0 и стыковые опоры с прямоугольными отверстиями 42 с другой стороны, а также зубчатые рейки 43, жестко крепящиеся к направляющим 44 -образного сечения, и боковые транспортировочные прямоугольные
5 отверстия 45.
Привод подвижной рамы 30 осуществляется от электродвигателя 46 через редуктор 47 и цепные передачи 48, которые сцеплены с тягой 49. Поворотный круг 24 приводится в движение электродвигателем 50
0 через редуктор 51 и сцепную подвижную полумуфту 52, соединенную с цилиндром 53 перемещения.
Устройство работает следующим образом.
Подвижная рама 30 вдвигается в вагон,
опираясь на опорный ролик 38, к ней с обеих
5 сторон в прямоугольные отверстия 39 стыковых опор вставляются прямоугольные щтыри 41 съемных направляющих 40, которые при этом укладываются на пол вагона, а к ним с фиксацией в пря.моугольных отверстиях 42 стыковых опор подстыковываются последующие съемные направляющие 40. Платформа 1, приняв щтучный груз на рабочий стол 8 со стола щтабелеукладчика 54, зажи.мает его верхним прижи.мом 16 и поднимает его до транспортировочной высоты
5 за счет гидроцилиндра 6 подъема и опускания 6, после чего каретка 26 с установленной на ней платформой 1 перемещается в вагон по направляющим 29 до тех пор, пока направляющие 23 не образуют с направляющими 44 единый сборно-составной ходовой путь для катков 3 и ходовых колес 2 платформы 1. Затем платформа 1 перемещается в глубь вагона по сборно-составному ходовому пути за счет приводных валов 20 с зубчатыми колесами 21, находящихся последовательно в зацеплении с зубчатыми рейками 22 и зубчатыми рейкам.и 43, до места укладки первого щтабеля штучного груза. В- момент укладки первого ряда штучного груза рабочий стол 8 опускается почти до пола вагона за счет гидроцилиндра 6 подъема и опускания. Затем ослабляется верхний прижим 16, выдвигается телескопический щитовой сталкиватель 11 гидроцилиндром 14 выдвижения, и из-под груза выкатывается платформа 1, при этом рабочий стол 8 не упирается в направляющие 44 за счет наличия в нем двух продольных прорезей, после чего рабочий стол 8 поднимается на транспортировочную высоту, сталкиватель 11, столкнув груз, возвращается в исходное положение и платформа 1 возвращается в исходное положение (к середине вагона) на каретку 26, за счет перемещения которой возвращается затем в зону загрузки, и цикл повторяется. После укладки последнего ряда первого штабеля щтучного груза рабочий стол 8 опускается почти до пола вагона с целью освобождения места для следующего щтабеля, затем выдвигаются захваты 10 гидроцилиндрами 14 выдвижения, которые входят в боковые транспортировочные прямоугольные отверстия 45 съемной направляющей 40, после чего рабочий стол 8 поднимается на транспортировочную высоту, отстыковывая съемную направляющую 40 от сборно-составного ходового пути, и она сбрасывается на конвейер-накопитель 55 после выхода платформы 1 из вагона и возвращения захватов 10 в исходное положение. При загрузке другой половины вагона каретка 26 сначала останавливается в зоне поворота перед вагоном, где сцепная подвижная полумуфта 52-за счет цилиндра 53 перемещения сцепляется с цепной полумуфтой 25 поворота поворотного круга 24, который разворачивается вместе с направляющими 23 поворотного круга, в которых в этот момент находятся катки 3 платформы 1, на 180° и затем сцепная подвижная полумуфта 52 расцепляется со сцепной полумуфтой 25 поворотного круга и платформа 1 перемещается в вагон для укладки последующих щтабелей вагона. При загрузке дверного проема раздвижные боковины 9 вдвигаются за счет гидроцилиндров 14 выдвижения, при этом вдвигаются выдвижные щитки 12 за счет взаимодействия щтырей 13 выдвижных щитков с отверстиями выдвижных щитков 12, и длина рабочего стола 8 становится чуть меньще ширины дверного проема вагона. Затем платформа 1, приняв штучный груз на рабочий стол 8 со стола штабелеукладчика 54, разворачивается на 90° в зоне поворота, заходит в вагон и укладывает первый ряд штучного груза перед опорным роликом 38. После укладки последнего ряда первого щтабеля штучного груза в дверном проеме, подвижная рама 30 выкатывается из вагона с целью .освобождения места для СоТедующего щтабеля на величину, равную ширине следующего щтабеля, и цикл повторяется до полной загрузки. Устройство позволяет производить полную загрузку вагона щтучным грузом.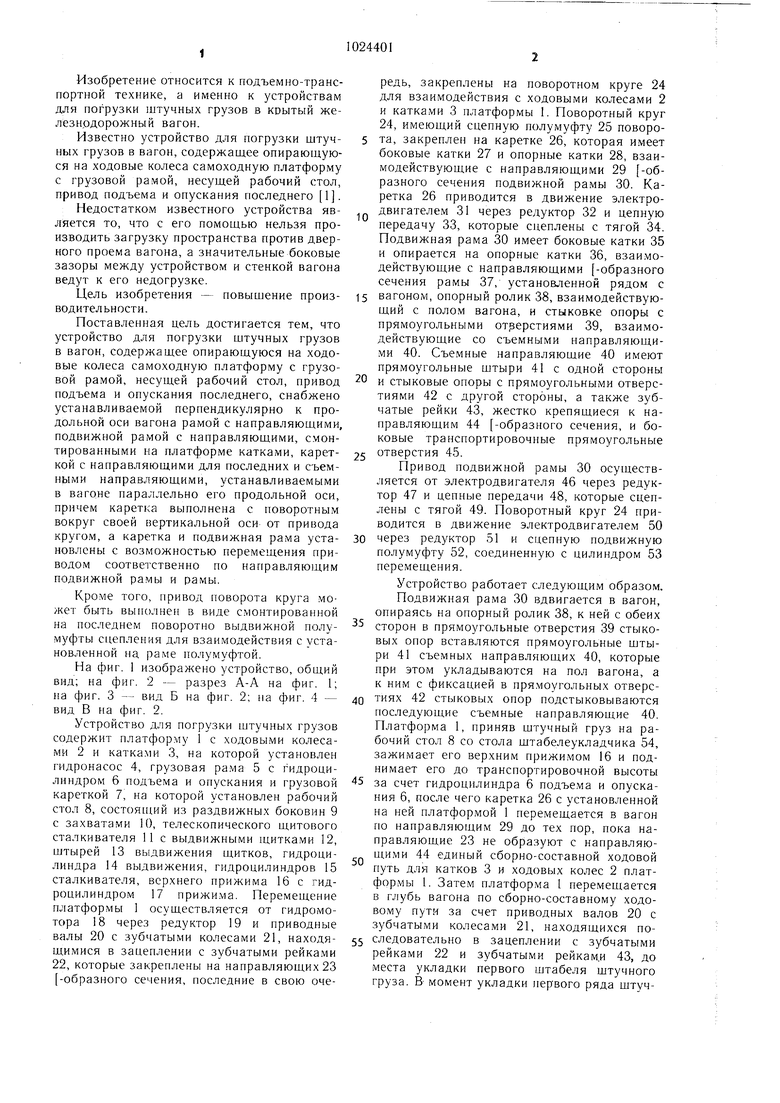
| название | год | авторы | номер документа |
|---|---|---|---|
| Вагонопогрузочная машина | 1986 |
|
SU1379248A1 |
| Самоходный вагонопогрузчик для штучных грузов | 1962 |
|
SU152416A1 |
| АВТОПОГРУЗЧИК | 1969 |
|
SU255843A1 |
| Склад для хранения штучных грузов | 1981 |
|
SU1030264A1 |
| СПОСОБ ПЕРЕГРУЗКИ ГРУЗОВ И СООТВЕТСТВУЮЩАЯ ТРАНСПОРТНАЯ СИСТЕМА | 2005 |
|
RU2374107C2 |
| Устройство для разгрузки и погрузки штучных грузов | 1983 |
|
SU1134509A1 |
| Устройство для укладски штучных грузов | 1971 |
|
SU358920A1 |
| Железнодорожная платформа для перевозки длинномерных грузов | 1990 |
|
SU1735085A1 |
| Устройство для загрузки и разгрузки стеллажей | 1988 |
|
SU1576451A1 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ ШТУЧНЫХ ГРУЗОВ В ВАГОНЫ | 1972 |
|
SU348465A1 |
1. УСТРОЙСТВО ДЛЯ ПОГРУЗКИ ШТУЧНЫХ ГРУЗОВ В ВАГОН, содержащее опирающуюся на ходовые колеса самоходную платформу с грузовой рамой, несущей рабочий стол, привод подъема и опускания последнего, отличающееся тем, что, с целью повыщения производительности, оно снабжено устанавливаемой перпендикулярно к продольной оси вагона рамой с направляющими, подвижной рамой с напраЕ.чяюшмми, смонтированными на платформе катками кареткой с направляющими для последни.х и съемными направляющими, устанавливаемыми в вагоне параллельно его продольной оси, причем каретка выполнена с поворотным вокруг своей вертикальной оси от привода кругом, а каретка и подвижная рама установлены с возможностью перемещения приводом соответственно по направляющим подвижной рамы и рамы. 2. Устройство по п. 1, отличающееся тем, что привод поворота круга выполнен в виде смонтированной на последнем поворотно-выдвижной полумуфты сцепления для взаимодействия с установленной на раме полумуфтой.
М Iг
II III -fN,
.-ftfp-III
S
-IL
1
rH
пН
(риг.2
Jif
V
4
фиг.З
Сриг.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Самоходный вагонопогрузчик для штучных грузов | 1962 |
|
SU152416A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
