Изобретение относится к устройствам для транспортирования грузов, а именно к роли- коопорам рольганга.
Цель изобретения - повышение надежности работы роликоопоры рольганга.
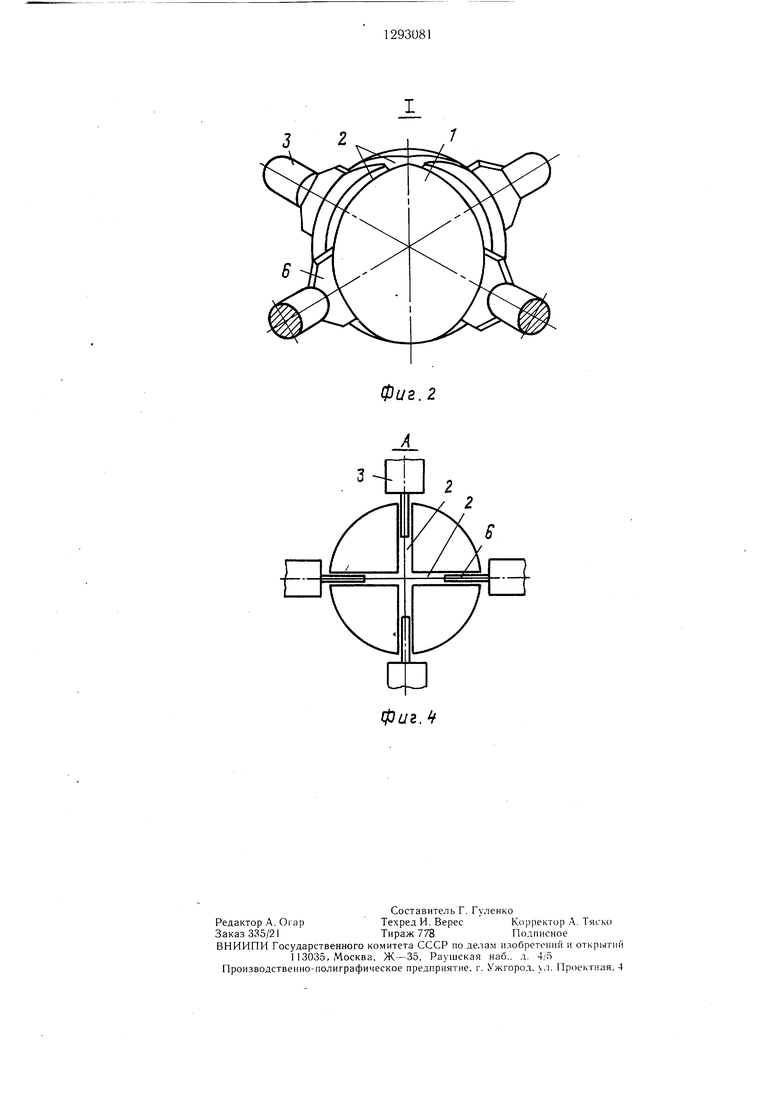
На фиг. 1 изображена кинематическая схема рольганга, аксонометрия; на фиг. 2 - узел I на фиг. 1; на фиг. 3 - роликоопора рольганга, разрез; на фиг. 4 - вид А на
6 валов. Груз 10, контактируя с роликами, перемещается.
Транспортирвание груза в поперечном направлении происходит аналогично от привода 15. Система управления рольгангом позволяет включать привод только в момент, когда торцовые элементы 6 всех действующих валов 3 расположены вертикально (исходное положение).
Конструкция роликоопор обеспечивает
фиг. 3.
Роликоопора рольганга содержит сфери- 10 механизированный отвод груза в двух вза- ческие ролики 1, на поверхности которых имно перпендикулярных направлениях. Вра- выполнены кольцевые пазы 2, расположенные в двух взаимно перпендикулярных плоскостях, проходящих через центр сферических роликов. Приводные валы 3 размещены горизонтально своими частями в опорах 4 неподвижной рамы 5 и установлены соос- но со сферическими роликами 1. Части валов
15
щение сферических роликов во взаимно перпендикулярных направлениях производится плавно, без толчков и ударов. Рольганг может быть использован в условиях малых производственных площадей.
20
25
3 выполнены с дугообразными торцовыми элементами 6, размещенными в кольцевых пазах 2 сферических роликов 1.
Элементы 6 валов 3 выполнены с пазами 7, в которых размещены шарики 8, контактирующие с кольцевыми проточками 9, выполненными на боковых поверхностях кольцевых пазов 2.
Роликоопоры рольганга обеспечивают
перемещение груза 10 во взаимно перпендикулярных направлениях. Продольное перемещение обеспечивается от привода 11 через шкивы 12, зубчатые ремни 13 и 14 и систему валов 3. Поперечное перемещение обеспечивается приводом 15 через шкивы 16, ремни 17 и 18 и далее валами 3.
Роликоопоры рольганга работают следующим образом.
Для передачи груза в продольном направлении (по стрелке) включается привод 11 и вращение от привода через шкивы 12 и ремни 13 передается валами 3 (по часовой стрелке). Валы 3 дугообразными торцами через шарики 8 воздействуют на пазы 2 сферических роликов 1 и вращают их относительно дугообразных торцовых элементов
35
Формула изобретения
1.Роликоопора рольганга, включающая неподвижную раму, опоры с приводными валами для поворота сферических роликов в двух взаимно перпендикулярных направлениях, отличающаяся тем, что, с целью повышения надежности работы роликоопоры, сферические ролики выполнены с двумя кольцевыми пазами, расположенными в двух взаимно перпендикулярных плоскостях, проходящих через центр сферических роликов, а каждый приводной вал выполнен из частей, каждая из которых установлена соосно со сферическими роликами на неподвижной раме посредством опор и выполнена с дугообразными торцовыми элементами, размещенными в кольцевых пазах сферических роликов.
2.Роликоопора по п. 1, отличающаяся тем, что кольцевые пазы сферических роликов выполнены с кольцевыми проточками, а дугообразные торцовые элементы частей приводных валов имеют пазы и размещенные в них и в кольцевых проточках кольцевых пазов сферических роликов шарики.
6 валов. Груз 10, контактируя с роликами, перемещается.
Транспортирвание груза в поперечном направлении происходит аналогично от привода 15. Система управления рольгангом позволяет включать привод только в момент, когда торцовые элементы 6 всех действующих валов 3 расположены вертикально (исходное положение).
Конструкция роликоопор обеспечивает
механизированный отвод груза в двух вза- имно перпендикулярных направлениях. Вра-
механизированный отвод груза в двух вза- имно перпендикулярных направлениях. Вра-
щение сферических роликов во взаимно перпендикулярных направлениях производится плавно, без толчков и ударов. Рольганг может быть использован в условиях малых производственных площадей.
Формула изобретения
1.Роликоопора рольганга, включающая неподвижную раму, опоры с приводными валами для поворота сферических роликов в двух взаимно перпендикулярных направлениях, отличающаяся тем, что, с целью повышения надежности работы роликоопоры, сферические ролики выполнены с двумя кольцевыми пазами, расположенными в двух взаимно перпендикулярных плоскостях, проходящих через центр сферических роликов, а каждый приводной вал выполнен из частей, каждая из которых установлена соосно со сферическими роликами на неподвижной раме посредством опор и выполнена с дугообразными торцовыми элементами, размещенными в кольцевых пазах сферических роликов.
2.Роликоопора по п. 1, отличающаяся тем, что кольцевые пазы сферических роликов выполнены с кольцевыми проточками, а дугообразные торцовые элементы частей приводных валов имеют пазы и размещенные в них и в кольцевых проточках кольцевых пазов сферических роликов шарики.
X
/8
/
W
фиг.
| название | год | авторы | номер документа |
|---|---|---|---|
| Роликоопора рольганга | 1989 |
|
SU1609723A2 |
| Роликоопора рольганга | 1989 |
|
SU1701607A1 |
| Роликоопора рольганга | 1987 |
|
SU1465368A1 |
| Роликоопора рольганга | 1980 |
|
SU893739A2 |
| Роликоопора | 1979 |
|
SU854830A1 |
| Стенд для испытания роликоопор ленточного конвейера | 1983 |
|
SU1135696A1 |
| ТРЕХКОЛЕСНЫЙ ВЕЛОСИПЕД ДЛЯ ПЕРЕВОЗКИ ГРУЗОВ | 1995 |
|
RU2087367C1 |
| Ролик рольганга | 1988 |
|
SU1570976A1 |
| Роликовый конвейер для перемещения грузов в двух взаимно перпендикулярных направлениях | 1990 |
|
SU1770228A1 |
| Узел задачи и выдачи кантуемого изделия в роторном кантователе | 1990 |
|
SU1738402A1 |
Изобретение относится к области транспортного оборудования. Цель - повышение надежности работы роликоопоры рольганга. Роликоопора включает неподвижную раму 5, сферические ролики (СР) и опоры 4 с приводными валами (ЛВ) 3 для поворота СР в двух взаимно перпендикулярных направлениях, выполненными из двух частей. Поверхности СР выполнены с двумя кольцевыми пазами, расположенными в двух взаимно перпендикулярных плоскостях, проходящих через центр СР. В пазах выполнены кольцевые проточки 9. Каждая часть ПВ 3 установлена соосно со СР на неподвижной раме 5 посредством опор 4 и выполнена с дугообразными торцовыми элементами 6. Они размещены в кольцевых пазах СР. Элементы 6 выполнены с пазами 7. В них размещены шарики 8, контактирующие с проточками 9. Для перемещения груза в продольном направлении включается привод продольного перемещения и ПВ 3 своими дугообразными торцами через шарики 8 воздействуют на пазы СР и вращают их относительно элементов 6. Груз, контактируя с СР, перемещается. Транспортирование груза в поперечном направлении обеспечивается от соответствующего привода через ПВ 3. 1 з.п. ф-лы, 4 ил. (Л Ю со со о 00 Фиг.З
| Патент ФРГ № 1237003, кл | |||
| Горный компас | 0 |
|
SU81A1 |
| Запальная свеча для двигателей | 1924 |
|
SU1967A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
