-W
Ј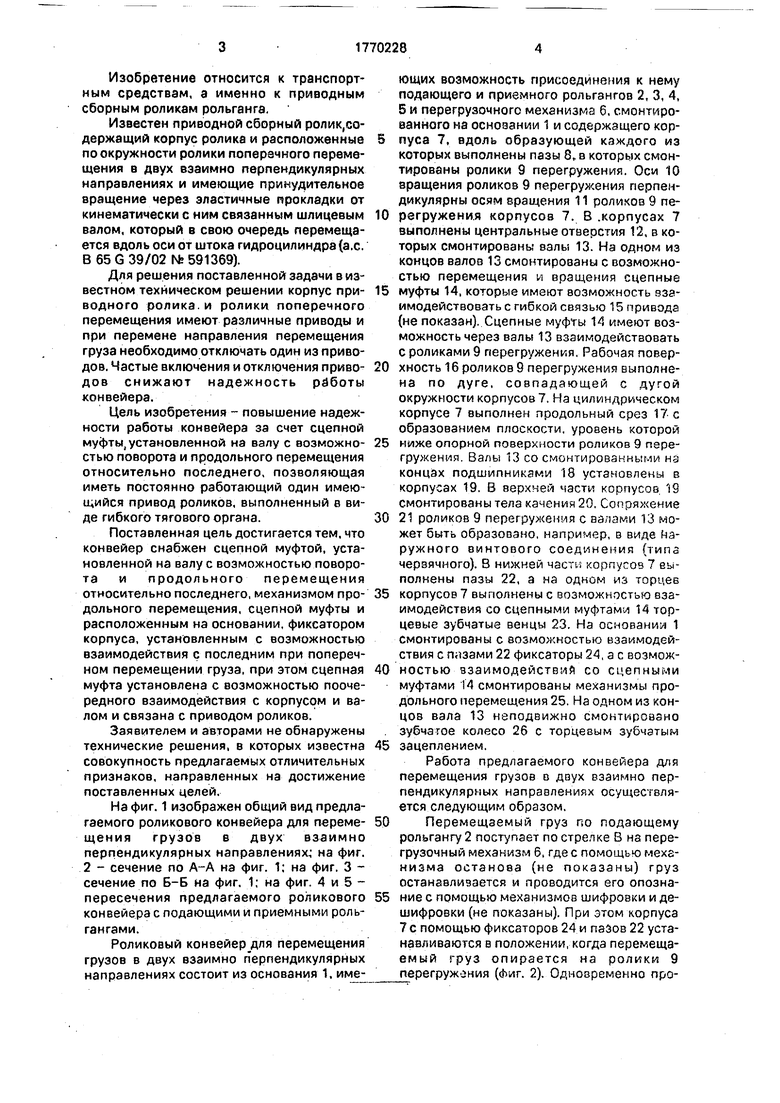

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для передачи грузов между перпендикулярно расположенными конвейерами | 1983 |
|
SU1135699A1 |
| Устройство для укладки грузов в пакет | 1983 |
|
SU1194797A1 |
| Поворотное устройство | 1989 |
|
SU1699877A1 |
| Роликовый конвейер | 1978 |
|
SU766976A1 |
| Приемно-ориентирующее устройство | 1987 |
|
SU1465393A1 |
| ПЕРЕГРУЖАТЕЛЬ ТАРНО-ШТУЧНЫХ ГРУЗОВ | 2000 |
|
RU2203213C2 |
| Устройство для подачи брусков под пакет листов | 1990 |
|
SU1819714A1 |
| КОМПЛЕКС ПОДЪЕМНО-ТРАНСПОРТНОГО ОБОРУДОВАНИЯ ДЛЯ УТИЛИЗАЦИИ ЖИДКИХ РАДИОАКТИВНЫХ ОТХОДОВ НА АТОМНОЙ ЭЛЕКТРОСТАНЦИИ И ЕГО СОСТАВНЫЕ ЧАСТИ | 2007 |
|
RU2350545C1 |
| Грузоподъемник крана-штабелера | 1990 |
|
SU1733347A1 |
| Устройство для передачи грузов между перпендикулярно расположенными конвейерами | 1986 |
|
SU1430328A1 |
Использование: изобретение относится к транспортным средствам, а именно к рольгангам. Сущность изобретения: конвейер содержит корпуса 7, вдоль образующей каждого из которых выполнены пазы 8. В последних смонтированы ролики 9 поперечного перемещения груза, оси 10 вращения которых перпендикулярны осям вращения 11 корпусов 7. В корпусах 7 установлены валы 13 со сцепными муфтами 14 для поочередного зацепления с зубчатыми венцами 23 или торцовыми зубчатыми колесами 26. При вхождении сцепной муфты 14 в зацепление с зубчатыми венцами 23 осуществляется вращение корпусов 7. а при вхождении сцепной муфты 14 в зацепление с торцовыми зубчатыми колесами 26 - вращение роликов 9. 3 з.п. ф-лы, 5 ил.
о ю го
00
Изобретение относится к транспортным средствам, а именно к приводным сборным роликам рольганга.
Известен приводной сборный ролик,со- держащий корпус ролика и расположенные по окружности ролики поперечного перемещения в двух взаимно перпендикулярных направлениях и имеющие принудительное вращение через эластичные прокладки от кинематически с ним связанным шлицевым валом, который в свою очередь перемещается вдоль оси от штока гидроцилиндра (а.с. В 65 G 39/02 №591369).
Для решения поставленной задачи в известном техническом решении корпус приводного ролика.и ролики поперечного перемещения имеют различные приводы и при перемене направления перемещения груза необходимо отключать один из приводов. Частые включения и отключения приво- дов снижают надежность работы конвейера.
Цель изобретения - повышение надежности работы конвейера за счет сцепной муфты,установленной на валу с возможностью поворота и продольного перемещения относительно последнего, позволяющая иметь постоянно работающий один имеющийся привод роликов, выполненный в виде гибкого тягового органа.
Поставленная цель достигается тем, что конвейер снабжен сцепной муфтой, установленной на валу с возможностью поворота и продольного перемещения относительно последнего, механизмом продольного перемещения, сцепной муфты и расположенным на основании, фиксатором корпуса, установленным с возможностью взаимодействия с последним при поперечном перемещении груза, при этом сцепная муфта установлена с возможностью поочередного взаимодействия с корпусом и валом и связана с приводом роликов.
Заявителем и авторами не обнаружены технические решения, в которых известна совокупность предлагаемых отличительных признаков, направленных на достижение поставленных целей.
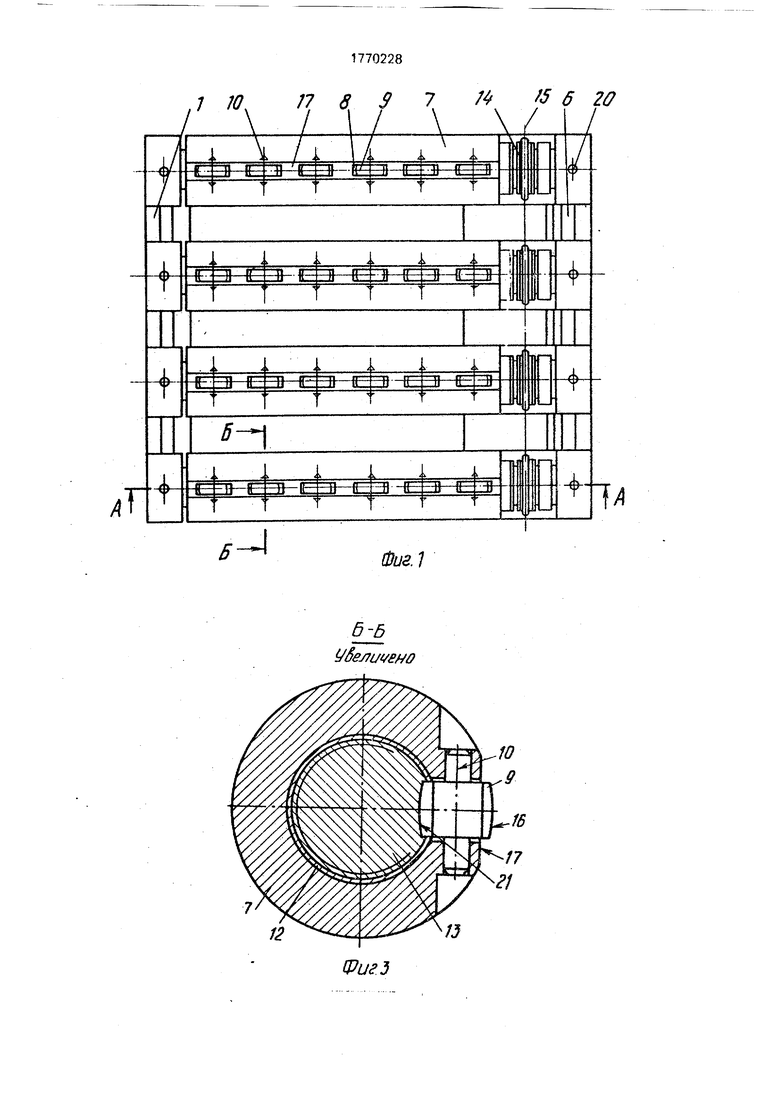
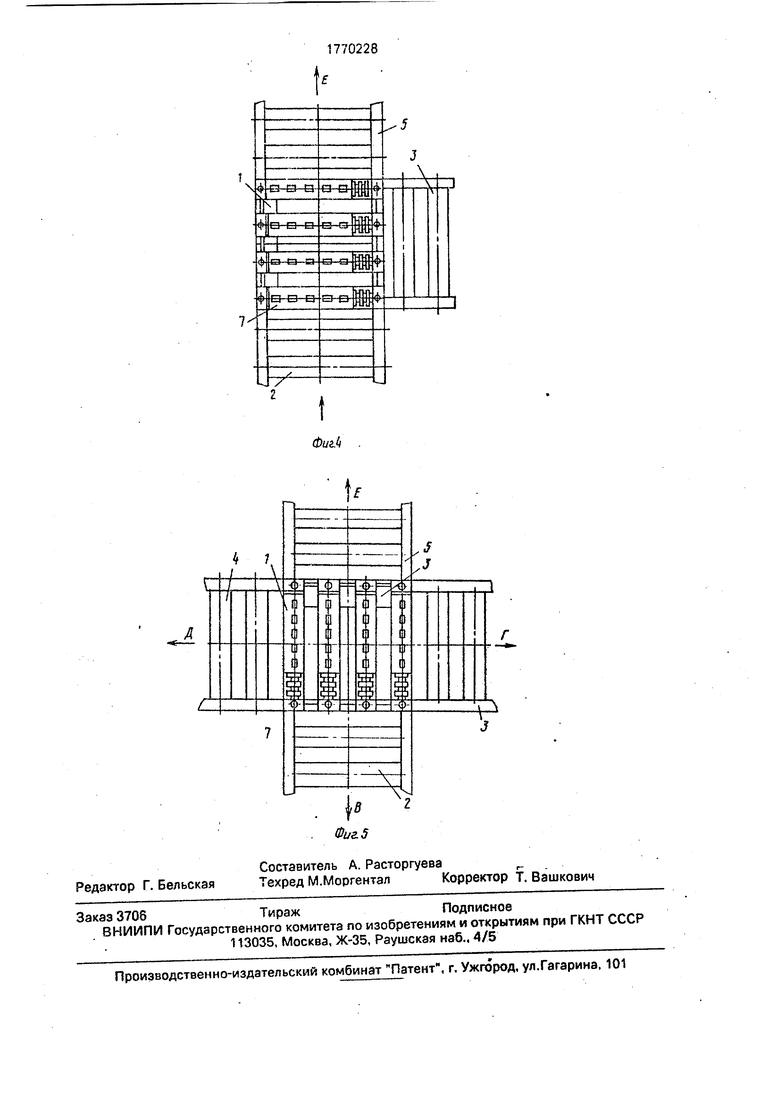
На фиг. 1 изображен общий вид предлагаемого роликового конвейера для перемещения грузов в двух взаимно перпендикулярных направлениях; на фиг. 2 - сечение по А-А на фиг. 1; на фиг. 3 - сечение по Б-Б на фиг. 1: на фиг. 4 и 5 - пересечения предлагаемого роликового конвейера с подающими и приемными рольгангами.
Роликовый конвейер для перемещения грузов в двух взаимно перпендикулярных направлениях состоит из основания 1, им
ющих возможность присоединения к нему подающего и приемного рольгангов 2, 3, 4, Б и перегрузочного механизма б, смонтированного на осноаании 1 и содержащего корпуса 7, вдоль образующей каждого из которых выполнены пазы 8, в которых смонтированы ролики 9 перегружения. Оси 10 вращения роликов 9 перегрух ения перпендикулярны осям вращения 11 роликов 9 пе0 регружени.я корпусов 7. В .корпусах 7 выполнены центральные отверстия 12, в которых смонтированы валы 13. На одном из концов валов 13 смонтированы с возможностью перемещения и вращения сцепные
5 муфты 14, которые имеют возможность взаимодействовать с гибкой связью 15 привода (не показан). Сцепные муфты 14 имеют возможность через валы 13 взаимодействовать с роликами 9 перегруженип. Рабочая повер0 хность 16 роликов 9 перегружения выполнена по дуге, совпадающей, с дугой окружности корпусов 7, На цилиндрическом корпусе 7 выполнен продольный срез 17 с образованием плоскости, уровень которой
5 ниже опорной поверхности роликов 9 перегружения. Валы 13 со смонтированными на концах подшипниками 18 установлены в корпусах 19. В верхней части корпусов 19 смонтированы тела качения 20. Сопряжение
0 21 роликов 9 перегружения с валами 13 может быть образовано, например, в виде наружного винтового соединения (типа червячного). 8 нижней части корпусов 7 выполнены пазы 22, а на одном из горцев
5 корпусов 7 выполнены с возможностью взаимодействия со сцепными муфтами 14 торцевые зубчатые венцы 23. На основании 1 смонтированы с возможностью взаимодействия с пазами 22 фиксаторы 24, а с возмож0 ностью взаимодействий со сцепными муфтами 14 смонтированы механизмы продольного перемещения 25. На одном из концов вала 13 неподвижно смонтировано зубчатое колесо 26 с торцевым зубчатым
5 зацеплением.
Работа предлагаемого конвейера для перемещения грузов в двух взаимно перпендикулярных направлениях осуществляется следующим образом.
0 Перемещаемый груз по подающему рольгангу 2 поступает по стрелке В на перегрузочный механизм 6, где с помощью механизма останова (не показаны) груз останавливается и проводится его опозна5 ние с помощью механизмов шифровки и дешифровки (не показаны). При этом корпуса 7 с помощью фиксаторов 24 и пазов 22 устанавливаются в положении, когда перемеща- емый груз опирается на ролики 9 перегружония (Фиг. 2). Одновременно происходит отключение с помощью механизмов переключения 25 производит включение сцепной муфты 14 от торцевого зубчатого венца 23. После проведения операции идентификации груза и определения направления его движения с помощью механизмов с помощью механизмов шифровки и дешифровки механизм продольного перемещения 25 производит включение сцепной муфты 14 с зубчатым колесом 26. Привод через гибкую связь 15 приводит сцепные муфты 14. сопряженные с ним зубчатые колеса 26, неподвижно соединенные с валами 13. во вращение. Направление вращения зависит от того, в какую сторону необходимо направить перемещаемый груз: по стрелке Г. или по стрелке Д (фиг. 4). При этом корпуса 7 с помощью фиксаторов 24 останавливаются, а ролики 9 перегруже- ния, получив вращение вала 13, перемещаемый груз в нужном направлении. Наличие на цилиндрическом корпусе 7 продольного среза 17 исключает контакт перемещаемого груза с поверхностью неподвижных в данный момент корпусов 7, что увеличивает надежность работы механизма перегружения 6. Тела качения 20 при перемещении груза на приемные рольганги 3 и 4 служат ему дополнительными опорами качения. После окончаний перемещения груза в перпендикулярном направлении механизмы продольного перемещения 25 переключают сцепные муфты 14 от зубчатых колес 26 и вращение валов 13 и роликов 9 перегружения прекращается. Если перемещение груза в перпендикулярных направлениях по стрелкам Г и Д не требуется, то остановленный груз после идентификации на механизме перегружения 6 перемещается по стрелке Е. При этом выполнение профилей роликов 9 перегружения в поперечном сечении по дуге, с дугой окружности корпусов 7, позволяет сохранить плавность перемещения грузов.
Использование предлагаемого изобретения позволит повысить надежность рабо- ты роликового конвейера для перемещения грузов в двух взаимно перпендикулярных направлениях.
Формула изобретения
сквозных пазов, в которых размещены ролики поперечного перемещения груза, расположенный в полости каждого поворотного корпуса вал. кинематически связанный с роликами поперечного перемещения груза, и
привод роликов, отличающийся тем, что. с целью повышения надежности работы конвейера, он снабжен сцепной муфтой, установленной на валу с возможностью поворота и продольного перемещения
относительно последнего, механизмом продольного перемещения сцепной муфты и расположенным на основании фиксатором корпуса, установленным с возможностью взаимодействия с последним при поперечном перемещении груза, при этом сцепная муфта установлена с возможностью поочередного взаимодействия с корпусом и валом и связана с приводом роликов.
7 10
1 8. 9 7 /f # Ј 20
5JJ Убелццено
12
ФигЗ
Фиг.1
13
| Приводной сборный ролик рольганга | 1976 |
|
SU591369A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
