Изобретение относится к транспортному оборудованию, а именно к роликоопорам рольганга.
Цель изобретения - повышение надежности работы роликоопоры.
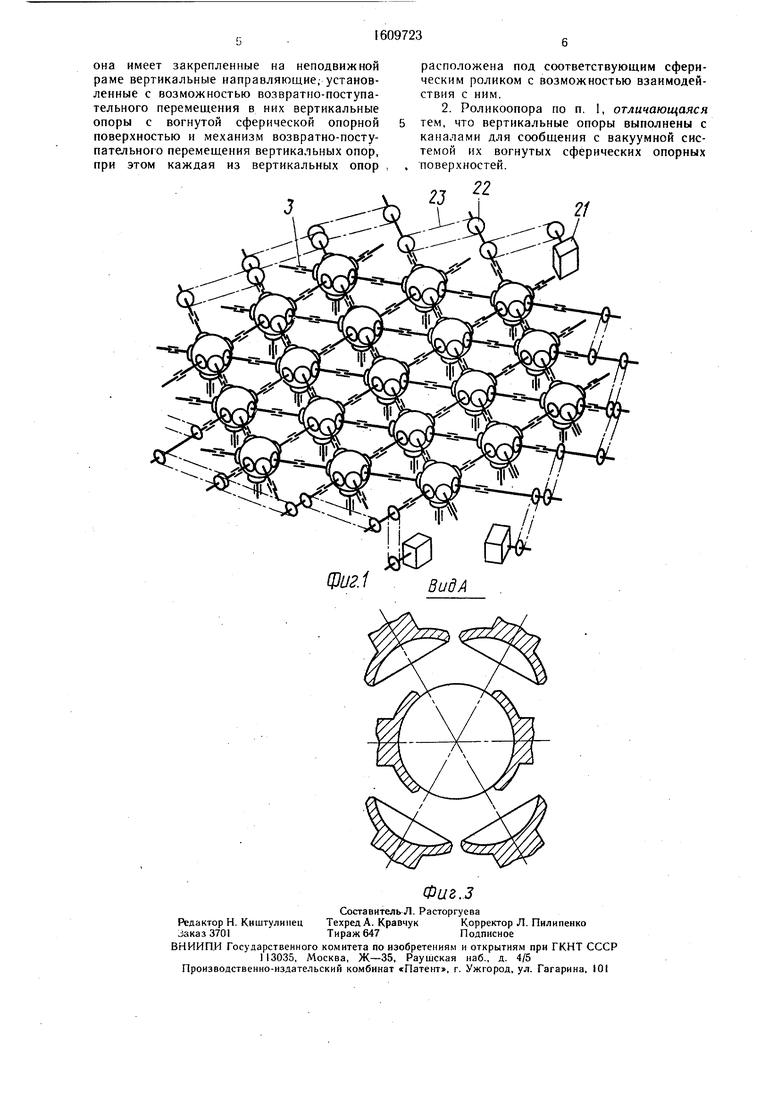
На фиг. i изображена кинематическая схема устройства, аксонометрия, общий вид; на фиг. 2 - «ролнкоопора рольганга, разрез; на фиг. 3 - вид А на фиг. 2.
Роликоопора рольганга содержит раму 1, на которой закреплены опоры 2. Приводные валы 3 размещаются горизонтально в опорах 2 и состоят из, отдельных элементов. Каждый элемент приводного вала 3 выполнен из соосных частей 4, установленных с зазо- {)ом один относительно другого и с возможностью осевого перемещения в шлицевой йтулке 5, расположенной в опоре 2.
Сферические ролики 6 размещены между Сферическими поверхностями приводных Ьпорных элементов 7. Роликоопора рольган- |га снабжена механизмом возвратно-посту- пательного перемещения соосных частей 4, состоящим из рычагов 8, пружины 9, под- :шипников 10, щтока I с расположенными на нем шпонками 12 и роликов 13, расположенных на концах рычагов 8.
Под каждым сферическим роликом 6 расположена вертикальная опора, выполненная в виде хвостовика 14 с вогнутой сферической опорной поверхностью, установленного с возможностью возвратно-поступательно- ;го перемещения в вертикальных направляю- щих 15, закрепленных на неподвижной ра- |ме 1, и расположенного под соответствую- Ьцим сферическим роликом 6 с возможностью ;взаимодействия с ним. Вертикальные опоры в в виде хвостовиков 14 выполнены с кана- ;лами 16 для сообщения с вакуумной сис- темой их вогнутых сферических опорных поверхностей.
Роликоопора рольганга имеет механизм возвратно-поступательного перемещения вертикальных опор, выполненный из пружины 17, ролика 18, распЪложенного в нижней части хвостовика 14, и штока 19 с расположенными на нем шпонками 20.
Роликоопора рольганга снабжена приводами 21 для передачи крутящего момента на приводные валы 3 посредством шкивов 22 и клиновых ремней 23.
Роликоопора рольганга работает следующим образом.
Для осуществления передачи груза 24 в одном из возможных направлений включается один из приводов (не показан) механизма возвратно-поступательного перемещения соосных частей 4., Шток 11 перемещается и взаимодействует шпонками 12 с роликом 13. Рычаги 8 поворачиваются, растягивая пружину 9, и раздвигают соосные части 4, прижимая их к сферическому ролику 6. Затем включается привод 21, соответствующий заданному направлению движения груза 24. Происходит перемещение груза
24 по поверхности сферических роликов 6, при этом передача крутящего момента осуществляется за счет трения, возникающего между сферическими поверхностями сферических роликов 6 и приводных опорных элементов 7.
Для осуществления передачи груза 24 в другом направлении включается привод (не показан) механизма возвратно-поступательного перемещения хвостовика 14., Шток 19 перемещается и взаимодействует шпонкой 20 с роликом 18. Хвостовик 14 перемещается по направляющей 15 вверх и своей сферической опорной поверхностью входит в контакт со сферическим роликом 6. Включает- ся вакуум и сферический ролик 6 плотно прижимается к хвостовику 14.
Затем включается привод механизма возвратно-поступательного перемещения соосных частей 4. , Шток 11 перемещается и шпонки 12 выходят из взаимодействия с роликами 13. Под действием пружины 9 рычаги 8 сдвигают соосные части 4, отжимая их от сферических роликов 6.
Затем включается другой привод механизма возвратно-поступательного перемеще5 ния соосных частей 4, соответствующий новому направлению перемещения.. Шток 11 перемещается и взаимодействует шпонками 12 с роликами 13. Рычаги 8 поворачиваются, растягивая пружину 9, и раздвигают соосные части 4, прижимая их к сферичес0 кому ролику 6.
После этого отключается вакуум и включается привод механизма возвратно- поступательного перемещения хвостовика 14. , Шток 19 перемещается и шпонки 20 выходят из взаимодействия с роликами 18. Под
5 действием пружины 17 хвостовик 14 опускается.
Затем включается привод 21, соответствующий новому направлению перемещения груза 24. Происходит перемещение груза
д 24 по поверхности сферических роликов 6. Расположение под каждым сферическим роликом 6 вертикальных опор и снабжение роликоопоры механизмом возвратно-поступательного перемещения вертикальных опор, позволяет увеличить диаметр приводных эле5 ментов, передаваемый сферическими роли-, ками крутящий момент и количество приводных валов, взаимодействующих с каждым сферическим роликом 6.
Подвод вакуума к вогнутой поверхности вертикальных опор через соответствующие
50 каналы 16, что позволяет надежно удержать сферический ролик 6 на вертикальной опоре при изменении направления транспортирования грузов 24.
Формула изобретения
. Роликоопора рольганга по авт. св. № 1465368, отличающаяся тем, что, с целью повышения надежности работы роликоопоры.
она имеет закрепленные на неподвижной раме вертикальные направляющие-установленные с возможностью возвратно-поступательного перемещения в них вертикальные опоры с вогнутой сферической опорной поверхностью и механизм возвратно-поступательного перемещения вертикальных опор, при этом каждая из вертикальных опор
расположена под соответствующим сферическим роликом с возможностью взаимодействия с ним.
2. Роликоопора по п. 1, отличающаяся тем, что вертикальные опоры выполнены с каналами для сообщения с вакуумной системой их вогнутых сферических опорных поверхностей.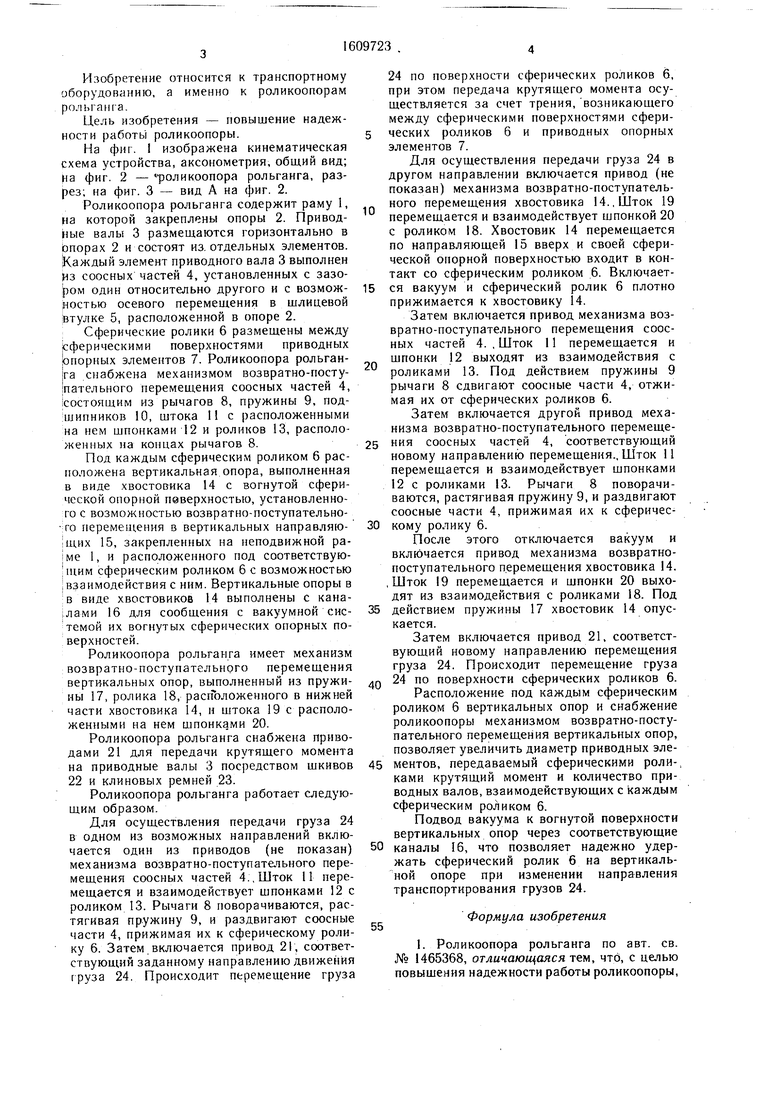
| название | год | авторы | номер документа |
|---|---|---|---|
| Роликоопора рольганга | 1989 |
|
SU1701607A1 |
| Роликоопора рольганга | 1987 |
|
SU1465368A1 |
| Роликоопора рольганга | 1985 |
|
SU1293081A1 |
| Клепальный станок | 1975 |
|
SU526432A1 |
| Ролик | 1990 |
|
SU1761642A1 |
| Установка для сварки электрозаклепками | 1987 |
|
SU1609600A1 |
| УСТРОЙСТВО ДЛЯ ШЛИФОВАНИЯ ТОРЦОВ ПРУЖИН | 1992 |
|
RU2008170C1 |
| Линия для обработки листовых заготовок | 1990 |
|
SU1784369A1 |
| Устройство для наматывания и разматывания рулонов | 1984 |
|
SU1196063A1 |
| Автомат для перфорирования керамических труб | 1982 |
|
SU1080986A1 |
Изобретение относится к транспортному оборудованию, а именно к роликоопорам рольганга. Цель - повышение надежности работы роликоопоры. Роликоопора рольганга включает раму 1, на которой закреплены опоры 2 с размещенными в них приводными валами. Последние состоят из отдельных элементов /Э/. Каждый из Э приводного вала выполнен из соосных частей 4, установленных с возможностью осевого перемещения в шлицевой втулке 5, расположенной в опоре 2. Сферические ролики /СР/ 6 размещены между сферическими поверхностями приводных опорных Э 7. Под каждым СР 6 расположена вертикальная опора, выполненная в виде хвостовика 14 с вогнутой сферической опорной поверхностью, установленного в вертикальных направляющих 15, закрепленных на неподвижной раме 1. Вертикальная опора выполнена с каналами 16 для сообщения с вакуумной системой их вогнутых сферических опорных поверхностей. Для осуществления передачи груза 24 в одном из возможных направлений включается один из приводов механизма возвратно-поступательного перемещения соосных частей 4. Происходит перемещение груза по поверхности СР 6. 1 з.п. ф-лы, 3 ил.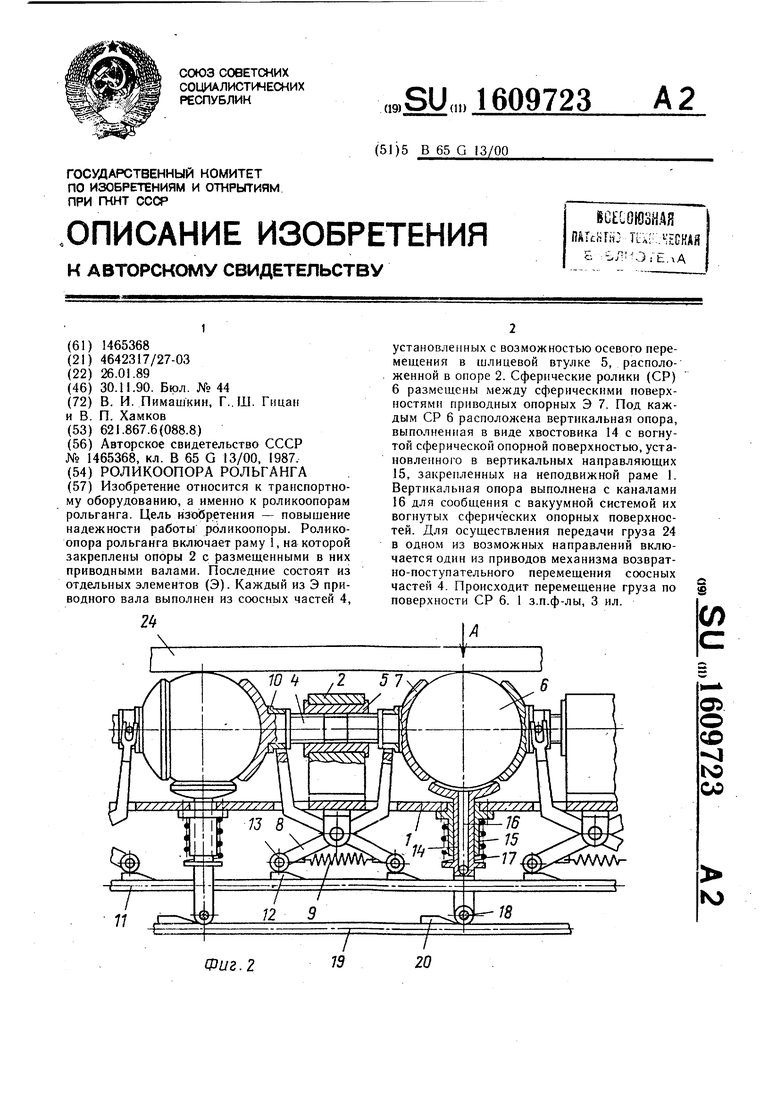
фиг.1
2f
ВидА
| Роликоопора рольганга | 1987 |
|
SU1465368A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Кузнечная нефтяная печь с форсункой | 1917 |
|
SU1987A1 |
