Изобретение относится к строительно-дорожным машинам, в частности к землеройно-транспортным машинам типа погрузчиков.
Цель изобретения - расширение тех нологических возможностей.
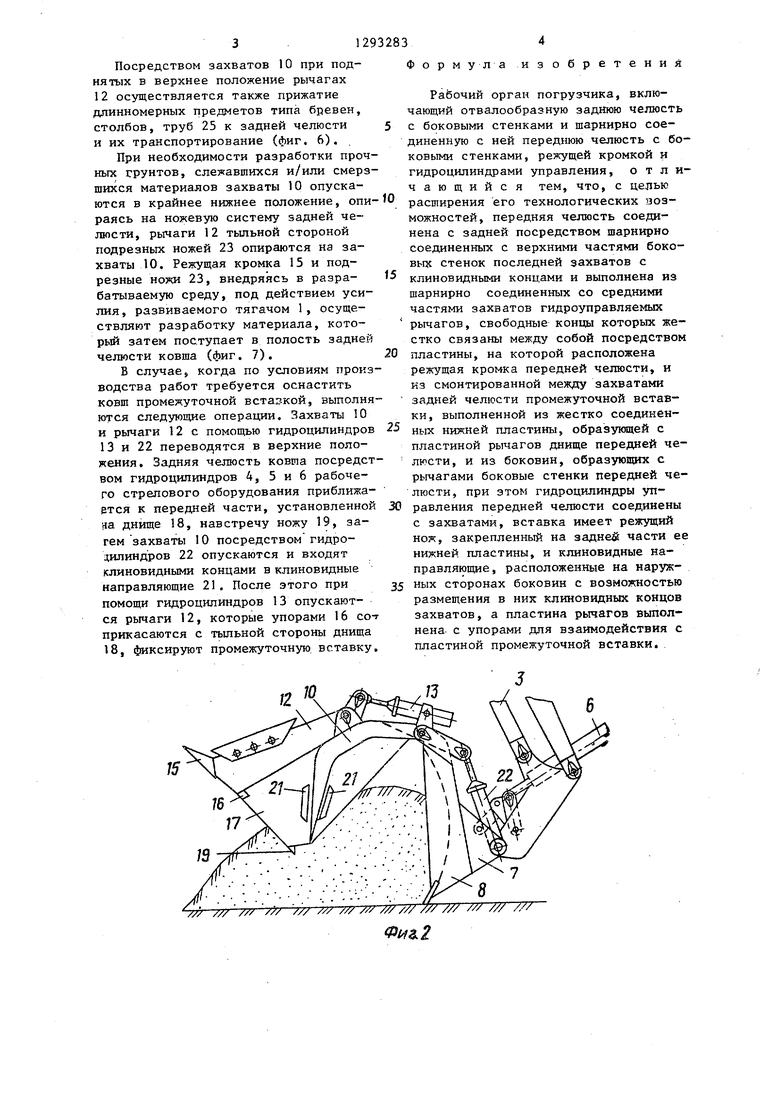
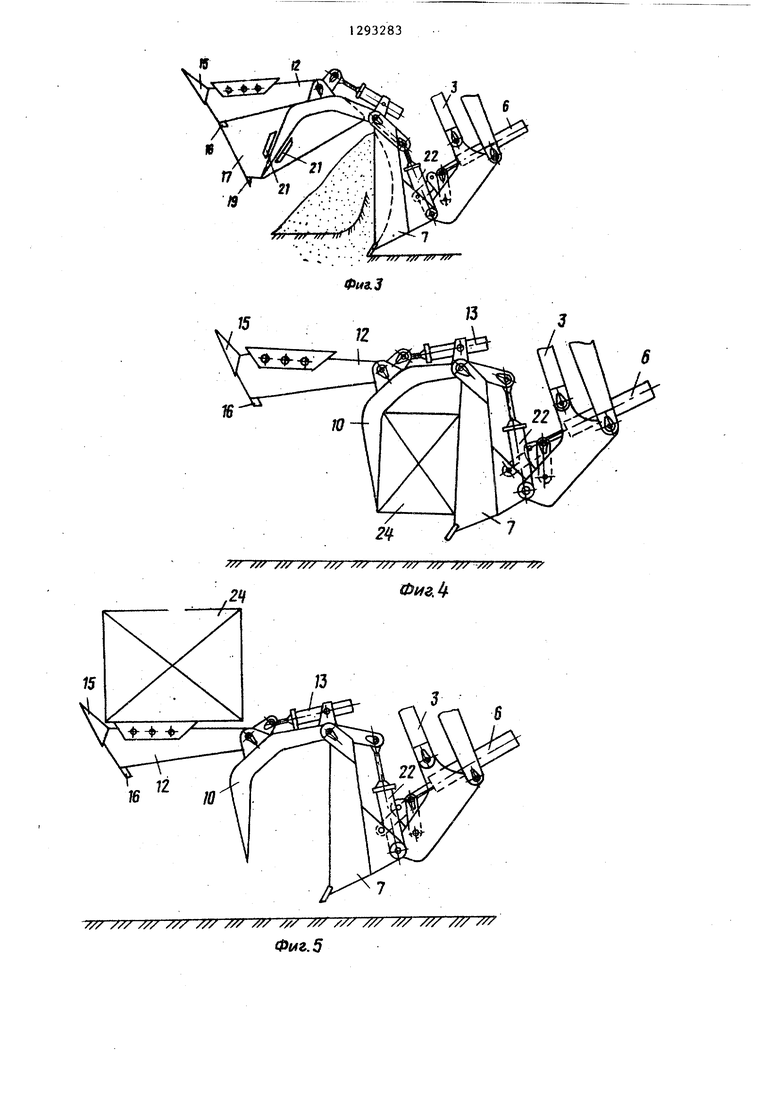
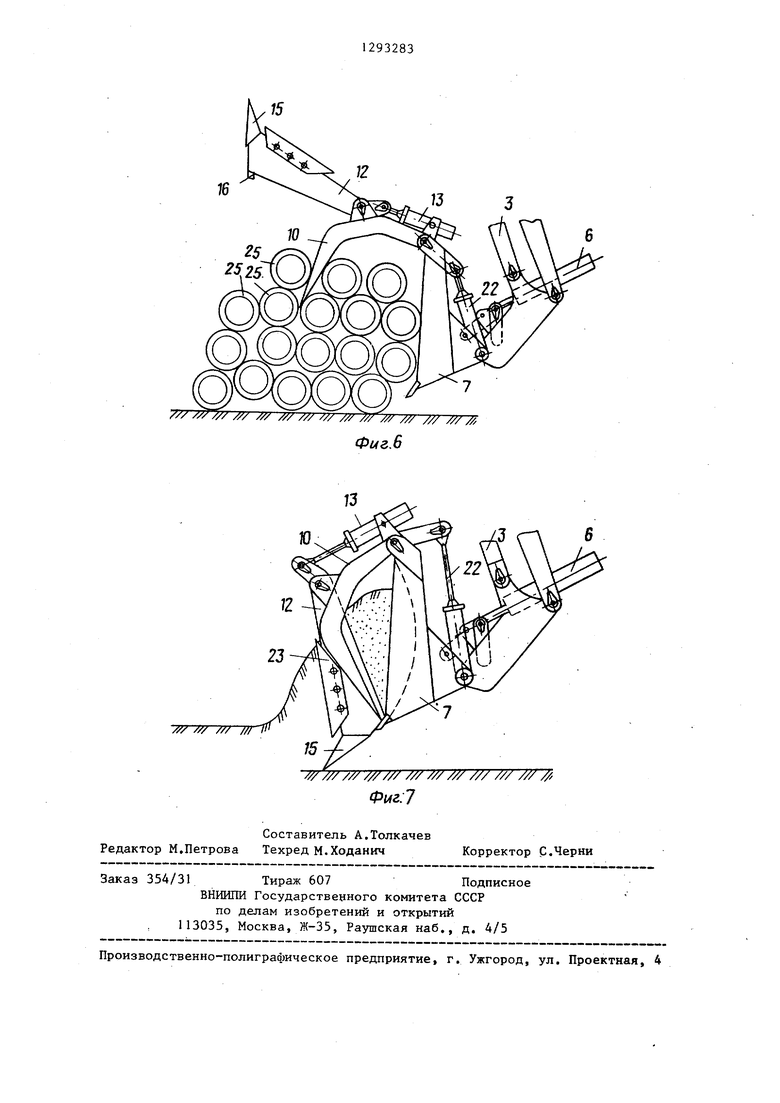
На фиг. 1 изображен рабочий орган погрузчика, вид сбоку; на фиг. 2 - то же, в процессе захвата сыпучего материала; на фиг. 3 - то же, в про- цессе раяработки грунта задней челюстью; на фиг. 4 - то же, в процессе транспортирования крупногабаритного груза, установленного между захватами и задней челюстью; на фиг.5- то же, при транспортировке крупногабаритного груза, установленного на рычагах; на фиг. 6 - то же, в процессе захвата длинномерных предметов типа трубы; на фиг. 7 - то же, в процессе разработки грунта передне челюстью при снятой промежуточной вставке.
Рабочий орган погрузчика монтируется на тягаче 1 посредством стрелы 2 и шарнирио-рычажного механизма 3 с гидроцилиндрами 4j 5 и 6 управления. Рабочий орган погрузчика включает отвалообразную заднкио челюсть 7 с боковыми стенками 8 и шарнирно соединенную с ней переднюю челюсть 9. Последняя соединена с задней челюстью 7 посредством шарнирно соединенных с верхними частями боковых стенок 8 захватов 10 с клиновидными концами 11 и состоит из шарнирно соединенных со средними частями захватов 10 гидроуправляемых рычагов 12 с гидроцилиндрами 13. Свободные концы рычагов 12 жестко связаны меж ду собой пластиной 14 с режущей кромкой 15 и упорами 16. Между рычагами и захватами смонтирована промежуточная вставка l, вьтолненная из нижней пластины 18 с ножом 19 и боковин 20. Пластина 18 совместно с пластиной 14 образуется днище передней челюсти, а боковины 20 совместно с рычагами 12 - боковые стенки передней челюсти.
, На наружных сторонах боковин 20 расположены клиновидные направляющие 21, с которыми при установке промежуточной вставки 17 взаимодействуют клиновидные концы И захватов 10. Гидроцилиндры 22 управления передней челюсти 9 установлены на тыльной стороне задней челюсти 7 и соединены с захватами 10. На боковых сторонах
рычагов 12 закреплены подрезные яо- жи 23. .
Рабочий орган раббтает следующим образом.
Маневрированием тягача 1 и поворотом стрелы 2 шарнирно-рьгчажного мханизма 3 при помощи гидроцилиндров 4 и 5 достигается установка двухче- пюстного ковша над объектом работ. Посредством гидроцилиндра 6 двухче- люстной ковш проворачивается в плоскости симметрии рабочего оборудования. Гидроцилиндрами 22 достигается поворот захватов 10 относительно шаниров крепления к боковым стенкам 8 задней челюсти и вместе с захватами 10 подъем передней челюсти. В таком положении челюстей рабочий орган может осуществлять захват, отделение ножами и транспортирование сыпучего и мелкокускового материала, мусора (фиг, 2), т.е. работать в грейферном режиме. При поднятой передней челюсти в верхнее положение рабочий орган может быть использован в качестве бульдозера по разработке и перемещению грунта и других материалов (фиг. 3), Грунт, вьфезаемь1й ножевой системой задней челюсти, на- капливается в полости челюсти между боковыми стенками 8 и затем под действием тягового усилия тягача I перемещается в нужном направлении.
В том случае, когда возникает необходимость в транспортировании длинномерных предметов типа бревна, столба, трубы и крупногабаритных грузов, рабочий орган погрузчика подвергается частичным демонтаж- ным операциям. При этом с помощь гидроцилиндров 13 рычаги 12 проворачиваются по часовой стрелке и упоры J6 освобождают переднюю челюсть, которая затем под действием гравитационных сил удерживается в нижнем положении, а захваты 10, проворачиваясь при помощи гидроцилиндров 22, выходят из соприкосновения с направляющими 21„ Груз 24, подлежащий транспортированию, прижимается захватами 10 к задней челюсти и в таком положении перемещается (фиг. 4). Если габариты груза не позволяют осуществить его прижатие к задней челюсти, то в этом случае при помош гидроцилиндров 13 рычаги 2 поворачиваются в горизонтальное положение и на них устанавливается транспортируемый груз 24(фиг. 5)
Посредством захватов 10 при поднятых в верхнее положение рычагах
12осуществляется также прижатие длинномерных предметов типа бревен, столбов, труб 25 к задней челюсти
и их транспортирование (фиг. 6),
При необходимости разработки прочных грунтов, слежавшихся и/или смерзшихся материалов захваты 10 опускаются в крайнее нижнее положение, опираясь на ножевую систему задней челюсти, рычаги 12 тьшьной стороной подрезньпс ножей 23 опираются на захваты 10. Режущая кромка 15 и подрезные ножи 23, внедряясь в разрабатываемую среду, под действием усилия, развиваемого тягачом 1, осуществляют разработку материала, который затем поступает в полость задней челюсти ковша (фиг. 7).
В случае, когда по условиям производства работ требуется оснастить ковщ промежуточной вставкой, выполняются следующие операции. Захваты 10 и рычаги 12 с помощью гидроцилиндров
13и 22 пepeвo ятcя в верхние положения. Задняя челюсть ковша посредством гидроцилиндров 4, 5 и 6 рабочего стрелового оборудования приближается к передней части, установленной tia днище 18, навстречу ножу 19, затем захваты 10 посредством гидро- дилинд ров 22 опускаются и входят клиновидными концами в клиновидные направляющие 21, После этого при помощи гидроцилиндров 13 опускаются рычаги 12, которые упорами 16 сот прикасаются с тыльной стороны днища 18, фиксируют промежуточную вставку.
Форм у л а изобретения
Рабочий орган погрузчика, включающий отвалообразную заднюю челюсть с боковыми стенками и шарнирно соединенную с ней переднюю челюсть с боковыми стенками, режущей кромкой и гидроцилиндрами управления, отличающийся тем, что, с целью
0
расширения его технологических зоз- можностей, передняя челюсть соединена с задней посредством щарнирно соединенных с верхними частями боковых стенок последней захватов с клиновидными концами и выполнена из шарнирно соединенных со средними частями захватов гидроуправляемых рычагов, свободные концы которых жестко связаны между собой посредством пластины, на которой расположена режущая кромка передней челюсти, и из смонтированной между захватами задней челюсти промежуточной вставки, выполненной из жестко соединен ных нижней пластины, образуклцей с
пластиной рычагов днище передней че- люсти, и из боковин, образующих с рычагами боковые стенки передней челюсти, при этом гидроцилиндры уп0 равления передней челюсти соединены с захватами, вставка имеет режущий нож, закрепленный на задней части ее нижней пластины, и клиновидные направляющие, расположенные на наруж5 ных сторонах боковин с возможностью размещения в них клиновидных концов захватов, а пластина рьтчагов выполнена с упорами для взаимодействия с пластиной промежуточной вставки.
/ //
Фма.2
У// /// /// /// х/ / / / / У//
Фиг. 5
15
16
/ / /// /// /// /// /// /// /// ////// /// /// /// //,
Фиг.6
| название | год | авторы | номер документа |
|---|---|---|---|
| Ковш гидравлического экскаватора | 1985 |
|
SU1303675A1 |
| КОВШ ФРОНТАЛЬНОГО ПОГРУЗЧИКА | 2014 |
|
RU2541321C1 |
| ДВУХЧЕЛЮСТНОЙ КОВШ ФРОНТАЛЬНОГО ПОГРУЗЧИКА | 1992 |
|
RU2019633C1 |
| Рабочее оборудование фронтального погрузчика | 1986 |
|
SU1388518A1 |
| Бульдозерное оборудование | 1979 |
|
SU823507A1 |
| ПОГРУЗЧИК ФРОНТАЛЬНЫЙ | 2009 |
|
RU2426298C1 |
| ПОГРУЗЧИК ФРОНТАЛЬНЫЙ БЫСТРОМОНТИРУЕМЫЙ | 2012 |
|
RU2515720C2 |
| Бульдозерное оборудование | 1980 |
|
SU899775A1 |
| Бульдозерное оборудование | 1981 |
|
SU972011A1 |
| КУСТОРЕЗ | 1997 |
|
RU2153797C2 |
Изобретение относится к области строительно-дорожных машин и позволяет расширить их технологические возможности. Рабочий орган содержит отвапообразную заднюю челюсть (Ч) 7 с боковыми стенками 8 и переднюю Ч 9, соединенные посредством шарнир- но связанных со стенками 8 захватов 10 с клиновидными концами П. При этом Ч 9 состоит из шарнирно соединенных с захватами 10 гидроуправляе- мых рычагов (ГР) 12 с гидроцилиндрами 13. Свободные концы ГР 12 жестко связаны между собой пластиной (П) 14 с режущей кромкой 15 и упорами 16. Между ГР 12 и захватами 10 установлена промежуточная встаг ка 17, выполненная из нижней П 18 с ножом 19 и боковинами 20. Прн.этомП 18 совместно с П 14 образует днище Ч 9, а боковины 20 с ГР 12 - боковые стенки Ч 9. На наружных сторонах боковин 20 расположены клиновидные направляющие 21 для размещения в них концов 11 захватов 10. Последние соединены с гидроцилиндрами 22 управления Ч 9, установленными на тыльной стороне Ч 7. В процессе работы гидроцилиндрами 22 достигается поворот захватов 10 к Ч 7 и подъем Ч 9. В таком положении рабочий орган может бсуще- ствлять захват,отделение ножами 19 и транспортирование сыпучего и мелкокускового материала, а при поднятых ГР 12 - транспортирование дпинномер- ных предметов. 7 ил. I СО //. Ю (Pui.t
///////////// //////////// ////// Фиг:7
Составитель А.Толкачев Редактор М.Петрова Техред М.Ходанич Корректор С.Черни
Заказ 354/31 Тираж 607Подписное
ВНИИЛИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Базанов А.Ф | |||
| и др | |||
| Самоходные погрузчики | |||
| М.: Машиностроение, 1979, с | |||
| Прибор для запора стрелок | 1921 |
|
SU167A1 |
| Парный автоматический сцепной прибор для железнодорожных вагонов | 0 |
|
SU78A1 |
