Изобретение относится к машиностроению- и может быть использовано в качестве импульсного привода в системах с программным управлением.
Целью является повышение точности обработки импульсов путем использования зубчатого шагового механизма с меньшей погрешностью углового шага.
На фиг.1 показана кинематическая скема импульсного привода; на фиг,2- то же, в многосателлитном исполнении на фиг.З - схема, поясняющая работу привода.
Импульсный привод (фиг.1) содержит корпус 1, силовой двигатель 2, управляющий двигатель 3, например электродвигатель постоянного тока, тормоз 4, планетарный зубчатый шаговый механизм, включающий муфту 5, связанный с управляющим двигателем 3 и тормозом 4 центральный кривошипный вал 6, установленное на последнем и связанное муфтой 5 с силовым двигателем водило 7 с коническим сателлитом 8 и взаимодействующее с последним центральное коническое колесо 9, соединенное с корпусом 1.
Импульсный привод (фиг.2) содержит кривошипный вал с двумя смещенными по фазе на 180 коленами на . котором установлены соответствующие водила 10 и 11 с сателлитами 12 и 13 (возможны варианты выполнения привода с большим числом водил с сателлитами) .
Импульсный привод работает следующим образом.
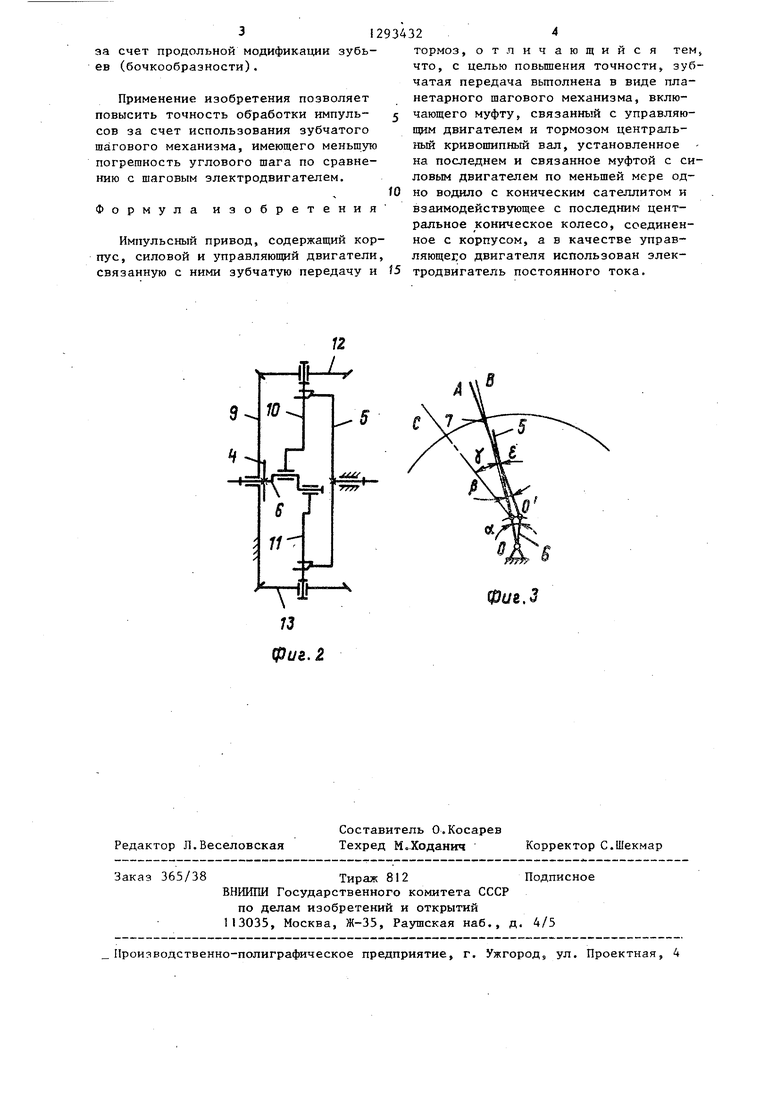
В исходном состоянии при выключенном управляющем двигателе 3 сателлит 8 заклинен на колесе 9 под действием силового двигателя 2. Это состояние соответствует положению А водила 7 (фиг.З). Саиопроизвольному расклиниванию сателлита 8 под действием вращающего момента силового двигателя 2, стремящегося повернуть кривоши 6, препятствует тормоз 4, тормозной момент которого превьш ает приведенный момент на кривошипе 6.
При включении управляющего двигателя 3 его вращающий момент, совпадающий по направлению с моментом на кривошипе 6 от силового двигателя 2 (суммарный момент превьшзает тормозной момент тормоза 4), приводит во вращение кривошип 6. При этом условия скорости вращения кривошипа 6 и управляющего двигателя одинаковы.
5
0
5
0
5
0
5 I
Расклинивание сателлита В происходит после поворота кривошипа 6 на угол об (фкГ:3). Соответственно, водило 7 поворачивается вокруг подвижной оси кривошипа на угол /2 и занимает положение В (фиг.З). При этом муфта 8 с валом силового двигателя поворачивается на угол 6. С восстановлением кинематически правильного зацепления сателлита 8 с колесом 9 в результате расклинивания передачи кривошипом 6 водило 7 вместе с сателлитом 8 под действием вращающего момента силового двигателя 2 поворачиваются вокруг подвижной оси о и занимают -положение С 5 соответствующее новому заклиниванию передачи сателлита 8. На следующей фазе цикла при повороте муфты 5 с валом силового двигателя 2 на угол V средняя угловая скорость этих элементов определяется разгонной характеристикой силового двигателя 2.
Таким образом, в пределах одного полного цикла или шага заклиниваниями сателлита 8 последовательно обрабатываются два выходных импульса на кривошипе 6. Первьш из них, обрабатываемый на первой фазе, маломощный вследствие того, что угловая скорость кривошипа 6 в пределах поворота на угол мала. Второй выходной импульс многократно превосходит первый, и его мощность определяется мощностью силового двигателя 2.
Число обрабатываемых шаговых импульсов за один оборот кривошипа 6 равно числу зубьев центрального колеса 9. Частота следования шаговых импульсов регулируется изменением угловой скорости управляющего дви- гателя 3 и, следовательно, изменением времени обработки первого фазового импульса (угол ),
Погрешность углового шага кривошипа б определяется кинематической точностью зубчатого шагового механизма,
Работа привода в многосателлитном исполнении (фиг.2) осуществляется сшалогично.
Вместо тормоза 4 в приводе может быть использована самотормозная пере- дача, например червячная.
Кромочный эффект при заклинивании зубьев сателлита 8 может быть ослаблен за счет использования как самоустанавливающегося сателлита, так и
за счет продольной модификации зубьев (бочкообраэности).
Применение изобретения позволяет повысить точность обработки импульсов за счет использования зубчатого шагового механизма, имеющего меньшую погрешность углового шага по сравнению с шаговым электродвигателем.
Формула изобретения
Импульсный привод, содержащий корпус, силовой и управляющий двигатели связанную с ними зубчатую передачу и
0
5
тормоз, отличающийся тем что, с целью повьшения точности, зубчатая передача вьтолнена в виде планетарного шагового механизма, включающего муфту, связанный с управляющим двигателем и тормозом центральный кривошипный вал, установленное на последнем и связанное муфтой с силовым двигателем по меньшей мере одно водило с коническим сателлитом и взаимодействующее с последним центральное коническое колесо, соединенное с корпусом, а в качестве управ- ляющесо двигателя использован электродвигатель постоянного тока.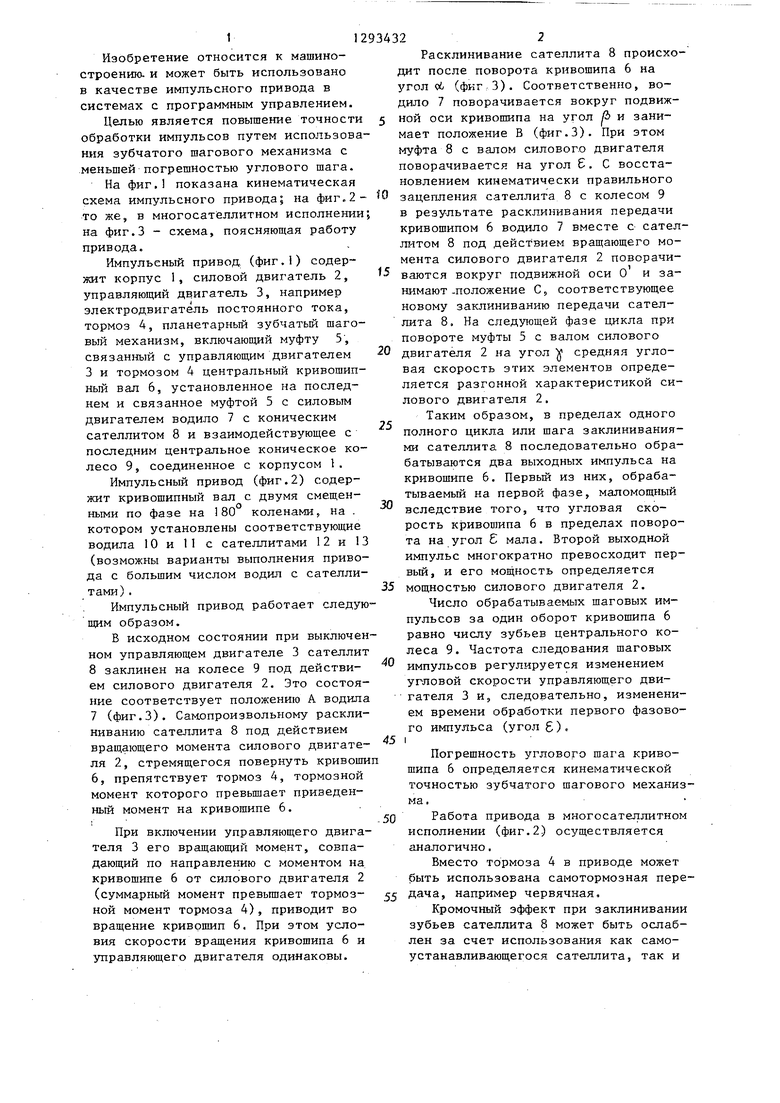
| название | год | авторы | номер документа |
|---|---|---|---|
| Импульсный привод | 1986 |
|
SU1379543A2 |
| Импульсный привод | 1988 |
|
SU1504444A2 |
| УПРАВЛЯЕМЫЙ ЭЛЕКТРОПРИВОД (ВАРИАНТЫ) | 2006 |
|
RU2307278C1 |
| ОДНОКОЛЕЙНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1993 |
|
RU2066651C1 |
| БЕЗИНЕРЦИОННЫЙ ТРАНСФОРМАТОР ВРАЩАЮЩЕГО МОМЕНТА ШАШКИНА | 1992 |
|
RU2073805C1 |
| Импульсный привод | 1986 |
|
SU1446399A1 |
| Привод кривошипного вала пресса | 1976 |
|
SU622687A1 |
| ТРАНСФОРМАТОР ВРАЩАЮЩЕГО МОМЕНТА ШАШКИНА | 1992 |
|
RU2073804C1 |
| ИМПУЛЬСНЫЙ ПРИВОД | 1991 |
|
RU2022185C1 |
| НОЖОВОЧНАЯ ПИЛА С ГИБКИМ ВАЛОМ | 2004 |
|
RU2324589C2 |
Изобретение, относится к машиностроению и может быть использовано в качестве импульсного привода в системах управления. С целью повышения точности отработки импульсов путем использования зубчатого шагового механизма последний включает центральный кривошипный вал 6, связанный с управляющим двигателем 3 и тормозом 4, установленное на кривошипном валу водило 7 с коническим сателлитом 8, взаимодействующим с заторможенным центральным колесом 9. Водило 7 связано муфтой с силовым двигателем 2. Частота следования шаговых импульсов регулируется управляющим двигателем, общее число импульсов за один оборот кривошипа равен числу зубьев заторможенного центрального колеса. 3 ил. (Л фи&.Г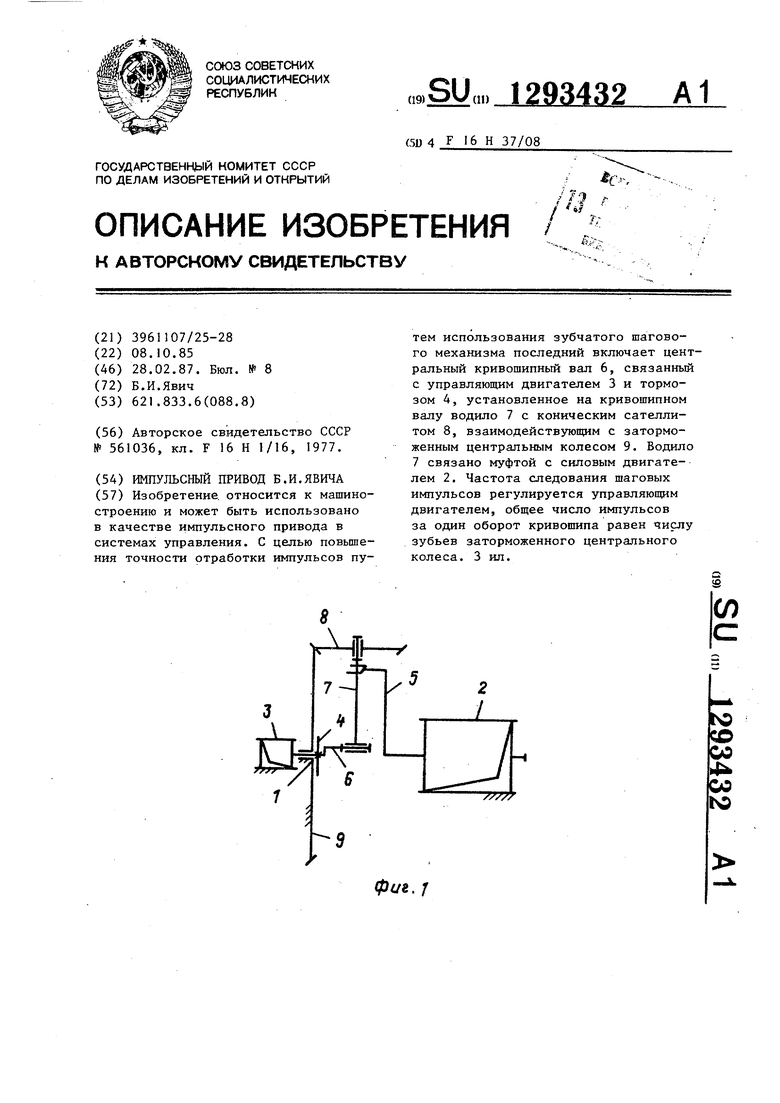
Фиб.З
Редактор Л.Веселовская
Составитель О.Косарев Техред МоХоданич
Заказ 365/38Тираж 812Подписное
ВНРШПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор С.Шекмар
| Привод с механическим усилителем мощности | 1973 |
|
SU561036A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
