Изобретение относится к сельскохозяйственному машиностроению, в частности к системам автоматического регулирования тяговой загрузки трактора,
Цель изобретения - улучшение тяго- во-экономических характеристик тракторного агрегата путем стабилизации положения почвообрабатывающего ору- дия в продольно-вертикальной плоскости.
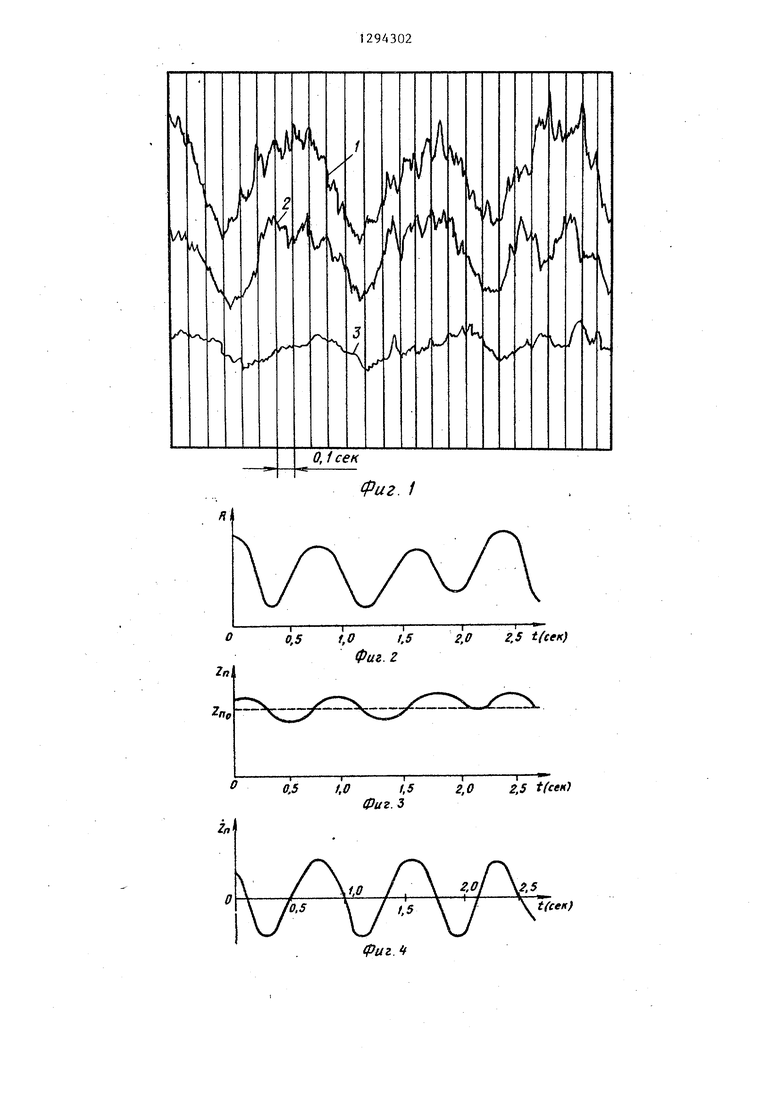
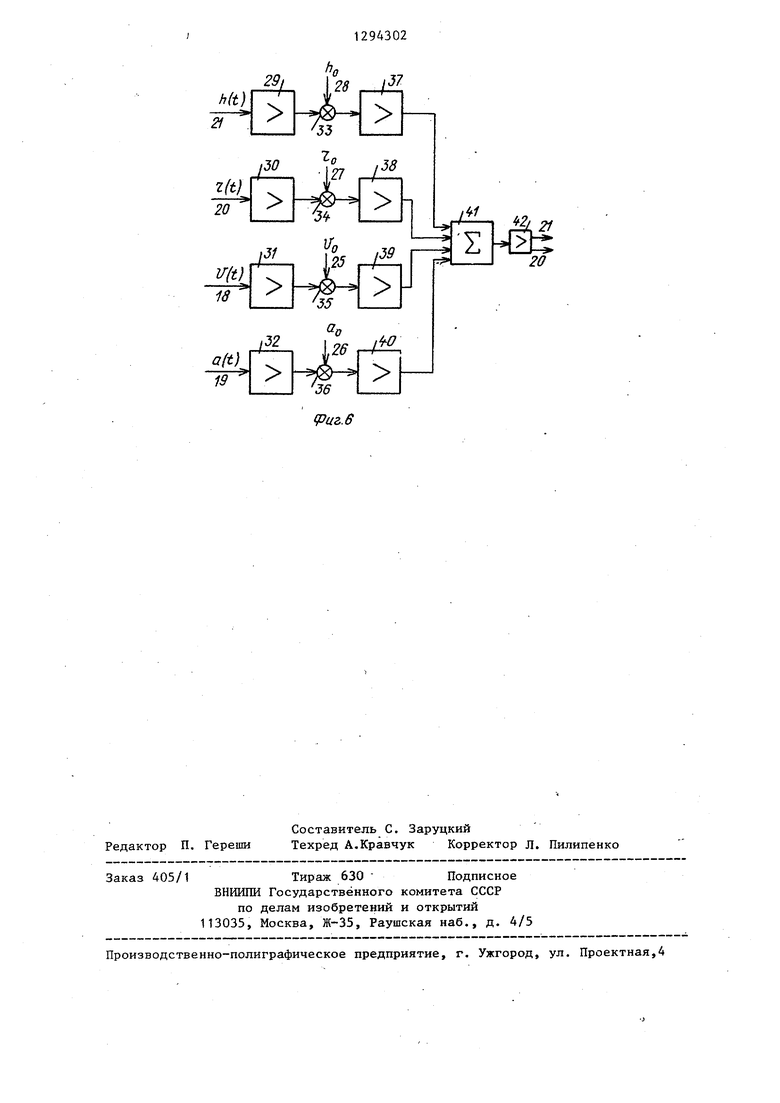
На фиг,1 приведены осциллограммы изменения усилий в правой (кривая 1) и левой (кривая 2) нижних тягах ме- ханизма навески трактора и изменения глубины вспашки (кривая 3); на фиг,2 - график изменения тягового усилия R на крюке трактора ,на фиг.З- график изменения глубины Z вспашки без учета высокочастотной составляющей; на фиг.4 - график изменения скорости вертикальных Z перемещений корпуса плуга относительно почвы;на фиг.5 - схема электрогидравлической системы; на фиг.6 - блок-схема электронного пульта управления.
Система состоит из масляного блока 1, гидронасоса 2, электрогидрав- лического усилителя 3, рабочего гидроцилиндра 4, датчика 5 тягового усилия, установленного в нижних тягах механизма 6 навески, датчика 7 глубины обработки почвы, закрепленного на раме сельскохозяйственного орудия 8, блока 9 датчиков ускорения 10 и скорости 11, установленного на тракторе 12 и электронного пульта 13 управления. Система снабжена трубопровода- ми 14-17, датчики 5,7,10 и 11 связаны электрически каналами 18-21 с соответствующими входами пульта 13 управления, выходы 22 и 23 которого соединены с электрсх идравлическим усилителем 3. Гидросистема имеет предохранительный клапан 24. Входы 25- 28 пульта 13 управления соединены с соответствующими задатчиками v,, , а, Zp, Ьд. Каждьй канал в пульте 13 уп- равления содержит соответствующий усилитель 29-32, один из блоков сравнения 33-36, соединенных с соответствующим задатчиком 28,27,25 и 26, при этом выходы блоков сравнения 33- 36 соединены посредством усилителей 37-40, сумматора 41 и выходного усилителя 42 с электрогидравлическим усилителем 3.
Система работает следующим образом.
В нейтральном режиме, когда сигналы с датчиков 5,7,10 и 11 равны сигналам соответствующих задатчиков 27, 28,26 и 25, т.е. a(t) а.; v(t) v,, h(t) h, r(t) r . При этом сигналы рассогласования, а следовательно, и сигнал управления с пульта управления 13 на вход электрогидравлического усилителя 3 отсутствуют. Полости подъема и опускания гидроцилиндра 4 заперты, насос 2 работает в режиме разгрузки, регулирование отсутствует. Величины сигналов задатчиков 27, 28, 26 и 25 выбираются в соответствии с агротехническими требованиями для данной почвенной зоны. Изменение какого-либо из регули- руемых параметров приводит к соответствующему изменению сигнала датчика, контролирующего данный параметр, и возникновению сигнала рассогласования, который в зависимости от знака передается от пульта управления 13 по каналу 20 и 21 на вход электрогидравлического усилителя и осуществляется автоматическая регулировка.
На фиг.1 приведены результаты ос- циллографирования процессов, имевших место при испытании пахотного агрегата, состоящего из трактора 12 и-навесного плуга, оснащенного системой автоматического регулирования тяговой загрузки трактора в условиях северо-запада.
На осциллограмме фиг.1 зафиксированы изменения усилий в правой (кривая 1) и левой (кривая 2) нижних тягах механизма навески трактора 12, а также процесс изменения . глубины вспашки (кривая .3).-Из графика видно что изменение усилия в нижних тягах опережает по фазе изменение глубины вспашки. Так как тяговое усилие на крюке трактора 12 равно алгебраической сумме горизонтальных проекций усилий в тягах навески, то его величина не всегда пропорциональна величине глубины обработки почвы.
Анализ характеристик (фиг.2-4),п .казал, что колебания нагрузки R на крюке трактора зависят не только, от величины Zf, глубины обработки почвы но и от скорости вертикальных перемещений Zf, корпусов почвообрабатывающего орудия относительно почвы.
Одним из факторов, вызывающих вертикальное перемещение корпусов почвообрабатывающего орудия относительно почвы, является наличие колебаний ос- тона трактора 12 в продольно-верти- калькой плоскости, которые при осуществлении силовой связи между остовом трактора 12 и почвообрабатывающим орудием передаются на него.Поэтому для стабилизации усилия на крюке трактора необходимо, чтобы колебания остова трактора в продольно-вертикальной плоскости в возможно меньщей степени передавались на почвообрабатывающее орудие,
При движении по неровностям рельефа возникает вертикальное ускорение остова трактора 12, которое воспринимается датчиком 10 ускорения. Сигнал a(t) с датчика 10 поступает непос- редственно по каналу 19 и через интегрирующее устройство 11, формирующее сигнал, соответствующий скорости v(t) вертикальных перемещений остова трактора 12 относительно почвы, по каналу 18 - на вход пульта 13 управления.
1 Система автоматического регулирования реагирует на сигналы, поступающие с датчика 10 вертикальных ус- корений остова трактора a(t) и интегратора 11 v(t), и, отрабатывая их позволяет компенсировать соответствующие вертикальные перемещения корпусов остова трактора 12, ас ним и почвообрабатывающего орудия относительно почвы.
Введение двух сигналов a(t) и v(t обусловлено наличием запаздывания при обработке управляющего сигнала гидросистемой, величина ошибки которой из-за этого может быть значительной. Использование сигнала a(t),про5 О
5
0
5
0
являющегося на входе пульта 13 управления раньше v(t), позволяет подготовить гидросистему к отработке сигнала управления, т.е. в предлагаемом устройстве реализовано форсирование сигнала управления по первой производной.
Формула изобретения
Электропадравлическая система автоматического регулирования тяговой загрузки трактора, содержащая установленные на тракторе гидробак с насосом, соединенным трубопроводами через электрогидравлический усилитель с соответствующими полостями рабочего гидроцилиндра, датчики усилия и глубины обработки почвы, входы которых подключены к электронному пульту управления, выход которого соединен с электрогидравлическим усилителем, а третий вход с задатчиком глубины обработки почвы, отличающая- с я тем, что, с целью улучшения тя- гово-экономических характеристик тракторного агрегата путем стабилизации остова трактора в продольно-вертикальной плоскости, она снабжена датчиком и задатчиком вертикального ускорения остова трактора, интегратором и задатчиком вертикальной скорости перемещения остова трактора и задатчиком тягового усилия, при этом выход датчика вертикального ускорения остова трактора соединен непосредственно и через интегратор с соответствующими входами электронного пульта управления, а выходы датчиков вертикального ускорения, вертикальной скорости и тягового усилия соединены с другими его соответствующими входами.
Фиг. 1
| название | год | авторы | номер документа |
|---|---|---|---|
| Сельскохозяйственный агрегат | 1986 |
|
SU1324598A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ИЗМЕНЕНИЯ ГЛУБИНЫ ОБРАБОТКИ ПОЧВЫ КУЛЬТИВАТОРОМ, ПЕРЕМЕЩАЕМЫМ ЭНЕРГЕТИЧЕСКИМ СРЕДСТВОМ С ТРЕХТОЧЕЧНОЙ НАВЕСКОЙ | 2022 |
|
RU2806157C1 |
| Электрогидравлический привод для управления навесными орудиями трактора | 1980 |
|
SU933014A1 |
| Сельскохозяйственный агрегат | 1983 |
|
SU1165250A1 |
| ПОЧВООБРАБАТЫВАЮЩЕЕ ОРУДИЕ С УСТРОЙСТВОМ ОБРАТНОГО ПРИКАТЫВАНИЯ | 2014 |
|
RU2654725C2 |
| Сельскохозяйственный агрегат | 1986 |
|
SU1461381A1 |
| Широкозахватное почвообрабатывающее орудие | 1990 |
|
SU1789089A2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ГЛУБИНЫ ОБРАБОТКИ ПОЧВЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2311011C1 |
| Колесный сельскохозяйственный трактор | 1987 |
|
SU1419542A1 |
| НАВЕСКА ТРАКТОРА | 1991 |
|
RU2025921C1 |
Изобретение относится к сельскохозяйственному машиностроению, точнее к гидросистемам тракторов,предназначенным для регулирования тяговой загрузки трактора. Целью изобретения является улучшение тягово-эко- номических характеристик тракторного агрегата путем стабилизации остова трактора в продольно-вертикальной плоскости. В процессе работы при движении по неровностям рельефа остов трактора 12 колеблется в продольно- вертикальной плоскости, в результате чего колеблется нагрузка на его крюке. Возникающее вертикальное ускоре:- ние воспринимается датчиком 10 ускорения. Сигнал a(t) с датчика 10 поступает непосредственно и через интегратор 11 (сигнал, соответствующий скорости v(t) вертикальных перемещений остова трактора 12 относительно почвы) ,;На вход электронного пульта 13 управления. В пульте 13 сигналы a(t) и v(t) сравниваются с сигналами а и VQ задатчиков 25, 26. Управляющие сигналы передаются на исполнительный гидроцилиндр 5. С помощью гидроцилиндра компенсируются соответствующие перемещения остова трактора 12 в продольно-вертикальной плоскости. Использование двух сигналов позволяет реализовать форсирование сигнала управления по первой производной. 6 ил. о S сл 15 // ///// У///// /// /// 7 фиг. 5 /77 /гг /77 j /y // /
- -т11-1- 0,5 1.01,52,0 2,5 tfceK)
Фиг. г
0.5t,01,5
Фиг. 3
2,0 2.5 t(ceK)
t(ceK)
Фиг.Ч
Редактор П. Гереши
Составитель С. Заруцкий
Техред А.Кравчук Корректор Л. Пилипенко
Заказ 405/1Тираж 630 Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная,4
| Способ изготовления твердых сплавов | 1944 |
|
SU64945A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
