10
Изобретение относится к переработке пластмасс и может быть использовано в различных отраслях народного хозяйства при производстве пластмассовых труб.
Целью изобретения является расширение номенклатуры изготавливаемых труб.
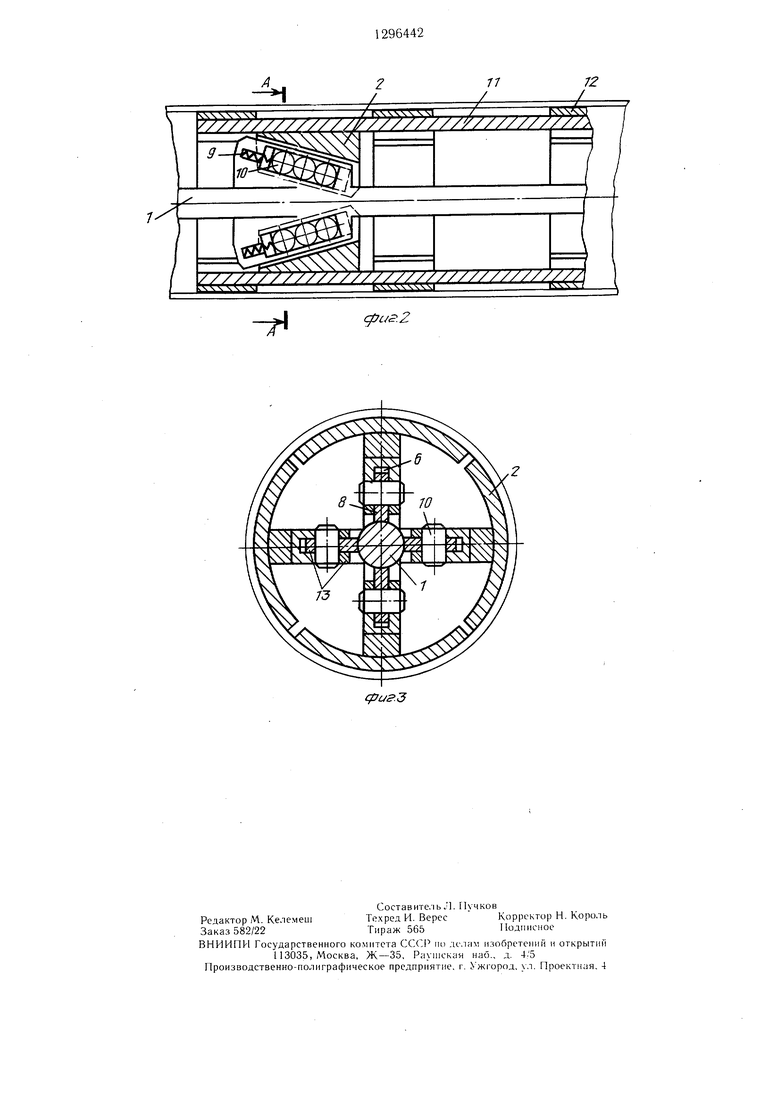
На фиг. 1 изображс:но устройство для захвата труб, продольное сечение; на фиг. 2 - вариант выполнения органа захвата в виде набора блок с сухарями; на фиг. 3 - разрез А-А на фиг. 2.
Устройство для захвата трубы состоит из стержня 1, соединенного с приводом его возвратно-поступательного перемещения (не показанным), органа захвата в виде расположенных с зазором по периметру формуемой трубы секторов 2 с рабочей поверх- 5 ностью, соответствующей внутренней поверхности, механизма 3 радиального перемепхе- ния секторов 2, снабженного средством их удержания вокруг стержня 1 в виде упругих колец 4, расположенных в пазах 5. Каждый сектор 2 на внутренней поверхности снабжен продольными направляющими 6, вы- полненнь1ми под углом к стержню 1.
Механизм 3 радиальною перемещения секторов 2 жестко закреплен на стержне 1 и снабжен равномерно распределенными по 25 их периметру наклонным к стержню направляющими 7. Каждая направляющая 7 может быть выполнена с пазом 8, в котором установлены с пружиной 9 тела 10 качения, контактирующие с сопряженными направляющими 6 сектора 2.
Для увеличения поверхности контакта формуемой трубы с органом захвата последний выполнен в виде набора балок 11 с закрепленным на каждой из них рядом сухарей 12 с рабочей поверхностью, соотляющими 6 секторов 2, разжимают их или сухари 12 до контакта с формуемой трубой и продвигают ее вперед. Угол наклона направляющих 6, 7 и величина хода стержня 1 определяют усилие прижатия секторов 2 или сухарей 12 к трубе.
Затем стержень 1 возвращается в исходное положение, освобождая при этом сектора 2 или сухари 12. Последние под действием упругих колец 4 начинают сжиматься.
После этого под действием сжатой пружины 14 или упора тел 10 качения в стенки направляющих 6, 7 и 13 сектора 2 тоже приобретают возвратное движение вслед за стержнем 1. Затем цикл повторяется.
Таким образом, предложенное устройство позволяет обеспечить захват труб любого диаметра без всякой перестройки. При этом, регулируя усилие прижатия секторов к трубе и площадь их контакта, устройство может 20 быть использовано при переработке различных пластических масс.
30
Формула изобретения
1. Устройство для захвата трубы, включающее орган захвата в виде расположенных с зазором по периметру трубы секторов с рабочей поверхностью, соответствующей внутренней поверхности трубы, и соединенный с каждым сектором механизм радиального перемещения, закрепленный на стержне, связанном с приводом его возвратно-поступательного перемещения, отличающееся тем, что, с целью расширения номенклатуры изготавливаемых труб, оно снабжено средством для удержания секторов вокветствующей внутренней поверхности трубы. руг стержня, а механизм радиального пе- Каждая балка 11 с сухарями 12 смон- ремещения секторов образован равномерно тирована на соответствующем секторе 2. распределенными по периметру наклоненными к стержню направляющими, одна из которых закреплена на стержне, а другие -
Средство удержания секторов вокруг стержня 1 может быть выполнено в виде дополнительной направляющей 13 (фиг. 3), до смонтированной на каждой основной направляющей 6, 7 параллельно ей с зазором, превыщающим диаметр тела 10 качения.
Устройство работает следующим образо.м.
Стержень 1, перемещаясь от привода, начинает поступательное движение, например, вперед. Механизм 3 радиального перемещения тоже движется вперед, при этом тела 10 качения, взаимодействуя с направна секторах, и телами качения, размещенными между ними.
2.. Устройство по п. 1, отличающееся тем, что средство для удержания секторов вокруг стержня выполнено в виде допол- 45 нительной направляющей, смонтированной на каждой основной направляющей параллельно ей, с зазором, превышающим диаметр тела качения.
5
ляющими 6 секторов 2, разжимают их или сухари 12 до контакта с формуемой трубой и продвигают ее вперед. Угол наклона направляющих 6, 7 и величина хода стержня 1 определяют усилие прижатия секторов 2 или сухарей 12 к трубе.
Затем стержень 1 возвращается в исходное положение, освобождая при этом сектора 2 или сухари 12. Последние под действием упругих колец 4 начинают сжиматься.
После этого под действием сжатой пружины 14 или упора тел 10 качения в стенки направляющих 6, 7 и 13 сектора 2 тоже приобретают возвратное движение вслед за стержнем 1. Затем цикл повторяется.
Таким образом, предложенное устройство позволяет обеспечить захват труб любого диаметра без всякой перестройки. При этом, регулируя усилие прижатия секторов к трубе и площадь их контакта, устройство может 0 быть использовано при переработке различных пластических масс.
5
0
Формула изобретения
1. Устройство для захвата трубы, включающее орган захвата в виде расположенных с зазором по периметру трубы секторов с рабочей поверхностью, соответствующей внутренней поверхности трубы, и соединенный с каждым сектором механизм радиального перемещения, закрепленный на стержне, связанном с приводом его возвратно-поступательного перемещения, отличающееся тем, что, с целью расширения номенклатуры изготавливаемых труб, оно снабжено средством для удержания секторов вок руг стержня, а механизм радиального пе- ремещения секторов образован равномерно распределенными по периметру наклоненными к стержню направляющими, одна из которых закреплена на стержне, а другие -
на секторах, и телами качения, размещенными между ними.
2.. Устройство по п. 1, отличающееся тем, что средство для удержания секторов вокруг стержня выполнено в виде допол- нительной направляющей, смонтированной на каждой основной направляющей параллельно ей, с зазором, превышающим диаметр тела качения.
П
/
12
/
(иг.г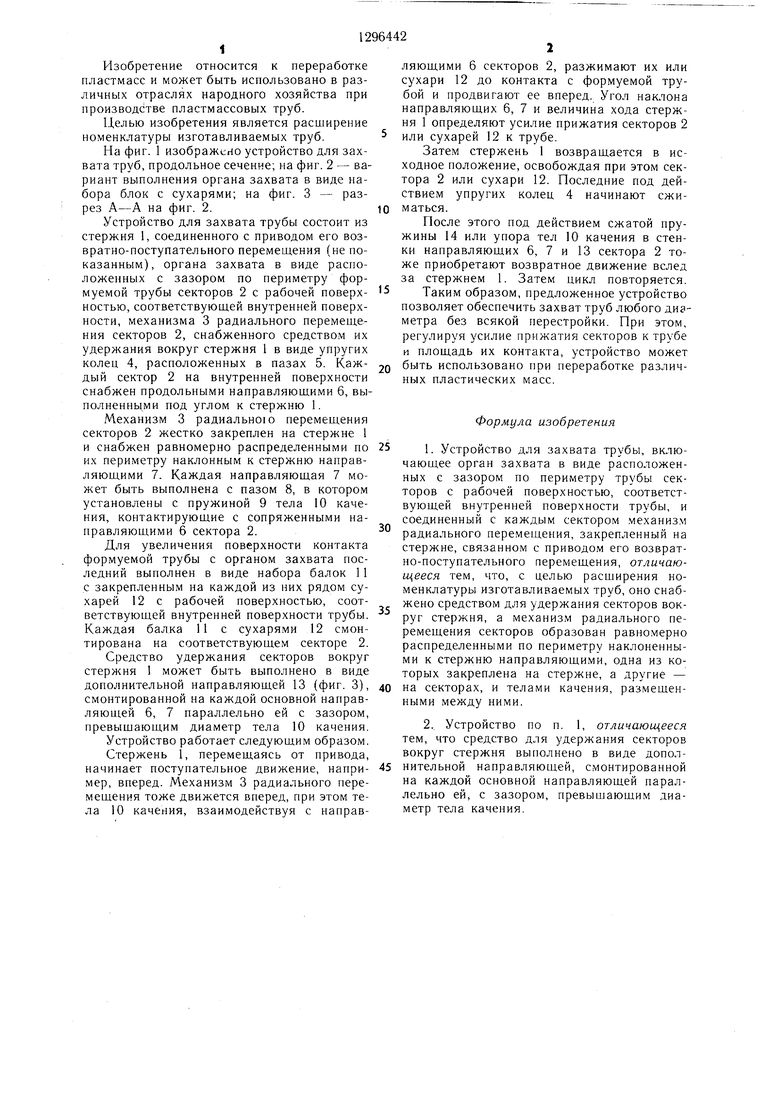
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для транспортирования трубы | 1984 |
|
SU1512795A1 |
| Устройство для самозахвата трубы | 1975 |
|
SU561678A1 |
| Штамп для радиальной штамповки | 1980 |
|
SU904861A1 |
| Полуавтомат для обработки борта эмалируемого изделия | 1989 |
|
SU1708924A1 |
| Устройство для транспортировки и установки раструбного стержня в центробежную форму | 1976 |
|
SU598548A3 |
| Устройство для формообразования обечаек | 1989 |
|
SU1722215A3 |
| Устройство для внутреннего охлаждения труб | 1980 |
|
SU1027242A1 |
| МАШИНА ДЛЯ ПОСЛОЙНОЙ УКЛАДКИ ШТУЧНЫХ ИЗДЕЛИЙ В ТАРУ | 2006 |
|
RU2303560C1 |
| Установка для формования трубчатых изделий | 1991 |
|
SU1796466A1 |
| МАШИНА ДЛЯ ФОРМОВАНИЯ И СУШКИ ПЯТОЧНОЙ ЧАСТИ ЗАГОТОВКИ ОБУВИ | 1967 |
|
SU201933A1 |
Изобретение относится к оборудованию для непрерывного изготовления труб, а именно к устройству для захвата трубы. Целью изобретения является расширение номенклатуры изготавливаемых труб. Устройство образовано органом захвата трубы в виде секторов 2 (С), рабочая поверхность которых соответствует внутренней поверхности трубы, и механизма их радиального пе- ремеш,ения в виде перемешаюш,егося стержня 1, имеюшего наклонные направляющие 7, несушие в наза х В тела качения 10, контак- тируюшие с наклонными направляющими С2. При смещении стержня в одну или другую сторону перемешаются тела качения 10 относительно наклонных направляющих 6 С 2., раздвигая или сводя их, что обеспечивает захват, транспортирование трубы и возврат устройства в исходное положение. Для увеличения диаметра на С2 устанавливают балки 11 с сухарями 12. 1 з.п. ф-лы, 3 ил. cpus.l TpySct iP (О to со Oi 4 to
сриг.З
| УСТРОЙСТВО для НЕПРЕРЫВНОГО ИЗГОТОВЛЕНИЯ ТРУБ ИЗ СТЕКЛОПЛАСТИКОВ | 0 |
|
SU234650A1 |
| Солесос | 1922 |
|
SU29A1 |
| Устройство для самозахвата трубы | 1975 |
|
SU561678A1 |
| Солесос | 1922 |
|
SU29A1 |
