Изобретение относится к управлению приводами постоянного тока, в частности к управлению механизмами экскаваторов, и может быть использовано в других промышленных ме. анизмах, например в дробилках, мельницах.
Целью изобретения является обеспечение возможности оперативного управления электромеханической характеристикой привода.
На фиг. 1 представлена блок-схема предлагаемого устройства; на фиг. 2 - зависимость тока отсечки от скорости приводного двигателя; на фиг. 3 - электромеханическая характеристика привода.
На фиг. 1-3 приняты следующие обозначения: IOTC - уставка тока отсечки; изменяемая составляющая уставки то. const
ка отсечки; 1 отс - постоянная составляющая уставки тока отсечки; Wj - скорость вращения приводного двигателя; Ьтс мин - минимальное значение тока отсечки; IOTC макс - максимальное значение тока отсечки; IcToir - стопорный ток.
В устройстве управления электроприводом постоянного тока приводной двигатель 1 питается от преобразователя 2 с блоком управления 3, соединенным через звено 4 ограничения тока с датчиком 5 тока электропривода. В устройстве управления имеются также датчик 6 скорости электропривода, источник 7 опорного напряжения и за- датчик 8 тока отсечки, выход которого соединен с первым входом блока 9 умножения. Второй вход блока 9 умножения подключен к выходу датчика 6 скорости, а выход - к первому входу сумматора 10. Второй вход сумматора 10 соединен с выходом источника 7 опорного напряжения, а его выход - с управляющим входом звена 4 ограничения тока.
Устройство работает следующим образом.
Сигнал, пропозициональный изменяемой
составляющей Ьтс, подается с выхода за
датчика 8 тока отсечки на первый вход блока 9 умножения, на второй вход которого подан сигнал датчика 6 скорости электропривода, пропорциональный угловой скорости вращения приводного двигателя. Выходной сигнал блока 9 умножения алгебраически суммируется в сумматоре 10 с сигналом, пропорциональным постоянной
; т Mnft ,
составляющей lore , сформированным источником 7 опорного напряжения. Напряжение с выхода сумматора 10 поступает на управляющий вход звена 4 ограничения тока. При этом напряжение на выходе звена 4, являющееся сигналом обратной связи потоку якоря, появляется в момент превышения выходным напряжением датчика 5 тока электропривода напряжения на входе сумматора 10. При снижении скорости приводного двигателя напряжение на выходе сумматора 10 увеличивается (при 1отс ;0) или
уменьщается (при ), вызывая соответственно меньщее или большее ограничение якорного тока (вращающего момента) приводного двигателя 1. При скорости приводного двигателя, близкой к нулю, величина напряжения на выходе сумматора 10 определяется только значением постоянной составляющей.
Таким образом, путем уменьшения влияния изменяемой составляющей уставки тока отсечки IOTC пропорционально скорости приводного двигателя обеспечивается постоянство его стопорного тока во всем диапазоне изменения уставки тока отсечки Ьтс.
При этом достигается увеличение ожидаемой производительности механизма за счет ограничения нагрузки при стопорении с повышенным начальным значением Ьтс, а следовательно, повышения надежности механизма или за счет сохранения расчетного стопорного усилия механизма при работе с пониженным начальным значением Ьтс (фиг. 3).
т.
I.
var crrc
/.
отс мсг,кс
const - ore
Jc
опс.нцл
о
o,s
.Z
vcf/
(fJasS
ВНИИПИ Заказ 589/34Тираж 607Подписное
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4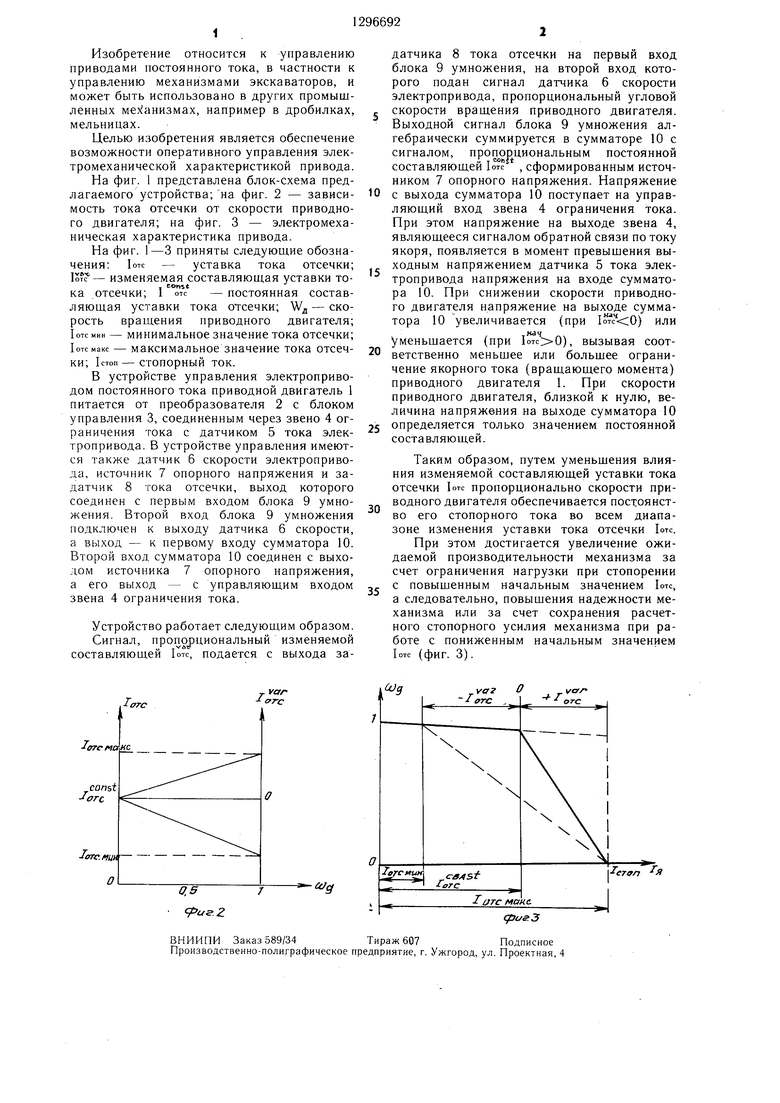
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления электроприводом постоянного тока | 1987 |
|
SU1491972A1 |
| Устройство для ограничения тока нагрузки электродвигателя постоянного тока | 1987 |
|
SU1527720A2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| Устройство для управления асинхронным электродвигателем | 1980 |
|
SU936335A2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ПОДАЧИ УГОЛЬНЫХ КОМБАЙНОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2066757C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ВЯЗКОУПРУГОЙ КИНЕМАТИЧЕСКОЙ СВЯЗЬЮ | 2010 |
|
RU2446552C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ | 2010 |
|
RU2428735C1 |
| Устройство управления электроприводом копающего механизма экскаватора | 1989 |
|
SU1656084A1 |
| Электропривод постоянного тока | 1980 |
|
SU1023600A1 |
| Способ и устройство выборки люфта в кинематической передаче опорно-поворотного устройства с двумя взаимосвязанными электроприводами | 2019 |
|
RU2726951C1 |

| Наглядное пособие по математике | 1949 |
|
SU84613A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ управления копающим механизмом экскаватора и устройство для его осуществления | 1980 |
|
SU901417A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
