Изобретение относится к гидравлическим исполнительным устройствам (ГИУ) и может использоваться в различных областях промышленности и народного хозяйства там, где требуется управление большой инерционной нагрузкой при использовании насоса ограниченной мош,ности, обеспечение инвариантности к внешней нагрузке, высокие динамические показатели, высокий КПД.
Цель изобретения - повышение точности позиционирования привода в разомкнутом состоянии, упрош,ение его конструктивной схемы.
На чертеже представлена принципиальная схема устройства.
Устройство содержит насос 1, сливной бак 2, гидродвигатель 3 с рабочими по- 15 лостями 4 и 5, связанными с насосом 1 и сливным баком 2 напорной сливной гидролиниями 6 и 7 через реверсивный гидрораспределитель 8, обратный клапан 9, установленный в напорной гидролинии 6, мультипликатор 10 с рабочей полостью 11, подключенной к напорной гидролинии 6 между обратным клапаном 9 и реверсивным гидрораспределителем 8 и приводной полостью 12, распределительный гидроагрегат 13 с торцовыми управляющими полостями 14 25 и 15, через который полость 12 связана с насосом 1 и сливным баком 2, командный гидрораспределитель 16, подключенный к сливному баку 2 и торцовой управляю- шей полости 14. Управляющая полость 14 и полость 12
цилиндров 17 и 18 с поршнями 19 и 20 соответственно и постоянно соединены со сливным баком 2 штоковыми полостями 21 и 22. Две гидролинии 23 и 24 подключены к насосу 1, гидролинии 25 и 26 связаны со сливным баком 2, а две гидролинии 27 и 28 35 соединены с реверсивным гидрораспределите- лем 8. Привод снабжен дросселем 29. Гидролиния 26 соединена с гидролинией 30. Гидроагрегат 13 выполнен в виде двух самостоятельных золотников 31 и 32 с полостями 14, 15 и 33 34 гидроуправления. Гидродвигатель 3 содержит исполнительный орган 35. В полости управления золотника 32 расположена пружина 36. Рабочим органом мультипликатора 10 являете плунжер
ти 4 и 5 подсоединяются к напорной и сливной гидролиниям 6 и 7, входные и выходные гидролинии 26, 27 и 28 золотника 31 - к насосу 1 и к сливному баку 2. Происходит разгон исполнительного органа 35. Причем с момента подачи команды управления и попадания поршня 19 на упор исходного состояния давление в поршневой полости 14 будет постоянным и определяется давлением (Ро-АР) и соотно- 10 шением торцовых площадей полостей 14 и 15 управления. Величина ЛР выбирается из расчета преодоления сил трения и сжатия пружины 36 золотника 32.
Поскольку разность AQ между заданным расходом QO и расходом Q, вытесняемым из сливной полости ,0 (до момента достижения исполнительным органом 35 заданной скорости), золотник 31 совместно с поршнем 19 движется вправо. При этом расход Q, дополняется до задан- ного (Qo) расходом, вытесняемым из поршневой полости 14, обеспечивая увеличение площади каналов золотника 31. Перепад давления на дросселе 29 максимальный в первый момент подачи командного сигнала, когда и соответственно максимальна скорость перемещения плунжера 38 золотника 31. Образованный перепад давления АР, подведенный в управляющие полости 33 и 34 золотника 32, обуславливает изменение его позиции и подсоединение полости 12
выполнены в виде гидро- 30 к насосу 1. Плунжер 37, перемещаясь,
обеспечивает в своей рабочей полости 11 и нагнетающей полости 4 повышенное давление. Разгон исполнительного органа 35 происходит, таким образом, при максимальной разгоняющей силе.
При подходе исполнительного органа 35 к заданной скорости расход Q увеличивается до , обуславливая останов плунжера 38 золотника 31 и поршня 19 и со- . ответственно обнуление их скоростей. При этом . Пружина 36 обеспечивает при этом установку плунжера 39- золотника 32 в исходное состояние и подсоединение полости 12 к сливному баку 2. Давление в нагнетающей полости 4 начинает падать.
37, а рабочими органами золотников 31 45 В этот момент повыщенный расход жид- и 32 - плунжеры 38 и 39 соответствен-кости (на величину, определенную скоростью
перемещения плунжера 37 и поперечным сечением его рабочей полости 11) обеспечивает насос 1 совместно с гидроаккумулятором 40. 50
но. Гидравлическое устройство снабжено гидроаккумулятором 40 и предохранительным клапаном 41.
Устройство работает следующим образом.
Максимально разгоняющая сила и максимальная площадь проходных каналов золотника 31 обеспечивает при Xi некоторое перерегулирование скорости исполнительного органа 35. При этом AQ становится меньше О и плунжер 38 золотника 31 вместе с поршнем 19 начинает движение в обратном направлении, обуславливая умень- щение площадей проходных каналов золотПри поступлении of гидрораспределителя 16 сигнала, например, в виде импульса, давление РО напора насоса 1, подведенное к торцовой управляющей полости 15 золотника 31, обеспечивает перемещение его совместно с поршнем 19 из исходного положения вправо. При этом рабочие полосперемещения плунжера 37 и поперечным сечением его рабочей полости 11) обеспечивает насос 1 совместно с гидроаккумулятором 40.
Максимально разгоняющая сила и максимальная площадь проходных каналов золотника 31 обеспечивает при Xi некоторое перерегулирование скорости исполнительного органа 35. При этом AQ становится меньше О и плунжер 38 золотника 31 вместе с поршнем 19 начинает движение в обратном направлении, обуславливая умень- щение площадей проходных каналов золотника 31 и торможение исполнительного органа 35. Создаваемый при этом ЛР на дросселе 29 обуславливает направление силы, действующей на золотник 32, совпадающее с направлением силы действия пружины 36.
При установившемся состоянии плунжер 38 золотника 31 занимает положение, соответствующее равенству всех сил,
Формула изобретения
Гидравлическое исполнительное устройство, содержащее насос, сливной бак, исполнительный гидродвигатель, рабочие полости которого сообщены с напорной и сливкой гидролиниями через реверсивный распределитель, обратный клапан, установленный в напорной гидролинии, измерительный дроссель, командный двухлинейный распределидействующих на исполнительный орган 35. Q тель, распределительный гидроагрегат, выСтабилизация скорости исполнительного органа 35, т. е. обеспечение инвариантности ИГ к внещним нагрузкам, происходит аналогичным образом. При отклонении скорости исполнительного органа 35 в ту или
полненный в виде трехлинейного и четырехлинейного золотников с торцовыми управляющими полостями, и мультипликатор давления, насосная полость которого подключена к напорной гидролинии между обиную сторону, в том числе и по причине 15 ратным клапаном и реверсивным распредеизменения внещнеи нагрузки, появляется сигнал AQ, который обеспечивает соответствующее перемещение плунжера 38 (с порщ- нем 19) и приведение системы в установившееся состояние. При этом значительное уменьщение скорости относительно заданной и появление соответствующей скорости плунжера 38 приводит к переключению золотника 32, включению мультипликатора 10 и форсированному восстановлению скорости исполнительного органа 35.
Величина пороговой скорости плунжера 38 регулируется площадью проходного сечения дросселя 29 и затяжной пружины 36.
U
Формула изобретения
Гидравлическое исполнительное устройство, содержащее насос, сливной бак, исполнительный гидродвигатель, рабочие полости которого сообщены с напорной и сливкой гидролиниями через реверсивный распределитель, обратный клапан, установленный в напорной гидролинии, измерительный дроссель, командный двухлинейный распределитель, распределительный гидроагрегат, вытель, распределительный гидроагрегат, выполненный в виде трехлинейного и четырехлинейного золотников с торцовыми управляющими полостями, и мультипликатор давления, насосная полость которого подключена к напорной гидролинии между об
20
лителем, а приводная полость через трехлинейный золотник сообщена со сливным баком и насосом, при этом четырехлинейный золотник установлен в гидролинии связи рабочих полостей гидродвигателя с насосом и командным двухлинейным распределителем, отличающееся тем, что, с целью повыщения точности позиционирования, трехлинейный золотник снабжен пружиной, установленной в управляющей полости, которая сообщена 25 с управляющей полостью четырехлинейного золотника, связанной через измерительный дроссель с насосом и второй управляющей полостью трехлинейного золотника.

| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлический привод | 1982 |
|
SU1134810A1 |
| Гидравлический привод | 1981 |
|
SU1023152A1 |
| Гидравлический привод | 1987 |
|
SU1448126A2 |
| Гидравлический привод | 1986 |
|
SU1399524A1 |
| Гидропривод | 1982 |
|
SU1062435A1 |
| Гидравлическая система | 1981 |
|
SU979725A1 |
| СИСТЕМА КОМПЕНСАЦИИ ПОГРЕШНОСТИ ОБЕСПЕЧЕНИЯ КОВОЧНОГО РАЗМЕРА РАДИАЛЬНО-КОВОЧНОЙ МАШИНЫ | 2003 |
|
RU2241566C2 |
| Следящий привод | 1982 |
|
SU1060821A1 |
| Гидропривод | 1991 |
|
SU1827449A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2004 |
|
RU2268400C1 |
Изобретение м.б. использовано в устр- вах с большой инерционной нагрузкой. Целью изобретения является повышение точности позиционирования. В управляющей полости 34 трехлинейного золотника 32 уста4 новлена пружина 36, а полость 34 сообщена с управляющей полостью 15 четырехлинейного золотника 31. Полость 15 связана через измерительный дроссель 29 с насосом 1 и второй управляющей полостью 33 золотника 32. При отклонении скорости гидродвигателя 3 появляется сигнал,обеспечивающий соответствующее перемещение плунжера 38 и приведение системы в установившееся состояние. При этом переключается золотник 32, включается мультипликатор 10 и скорость исполнительного органа 35 форсированно восстанавливается. Величина по роговой скорости плунжера 38 регулируется дросселем 29 и затяжкой пружины 36. 1 ил. /1 Ф to со О5 ел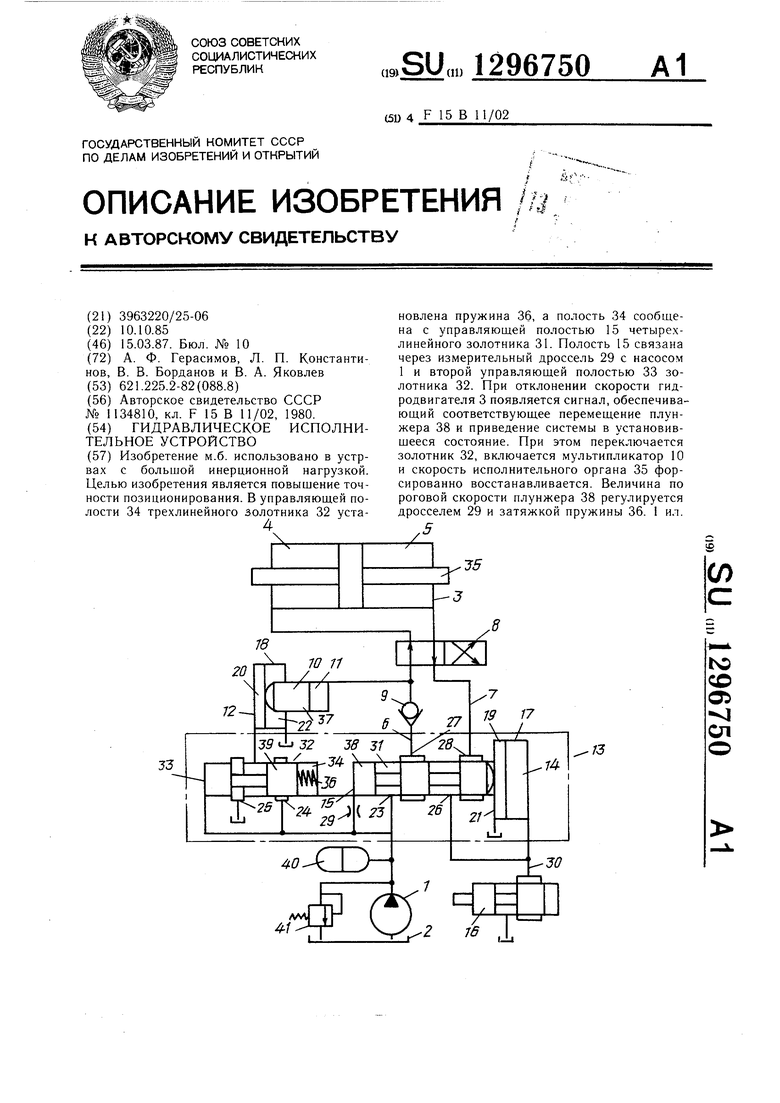
| Гидравлический привод | 1982 |
|
SU1134810A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
