Изобретение относится к системам автоматического управления объектами с нестационарными динамическими характеристиками, включая время запаздывания, и может быть использовано для адаптивного управления в различных отраслях промышленности и при исследовании характеристик объектов с неизвестными параметрами.
Целью изобретения является повышение качества управления и расширение функциональных возможностей.
На чертеже представлена функциональная схема системы адаптивного управления объектами с переменным за паздыванием.
Система содержит задатчик 1, элемент 2 сравнения, регулятор 3, объект 4 управления, блок 5 аналого- цифровых преобразователей, блок .6 идентификации параметров математической модели объекта управления, блок 7 вычисления весовых функций объекта по модели высокого порядка, блок 8 вычисления весовых функций объекта по модели низкого порядка, блок 9 нахождения функции ошибок, блок 10 оценки истинного времени запаздывания объекта, блок 11 оценки параметров Модели низкого порядка., блок 12 настройки коэффициентов регулятора.
Адаптивная система управления состоит из двух контуров и работает сле- I, образом.
Первый контур содержит задатчик 1, элемент 2 сравнения, регулятор 3 и объект 4 управления. На первый вход регулятора 3 поступает ошибка регуВторой контур предназначен для настройки коэффициентов регулятора в соответствии с изменением динамических характеристик объекта и содержит блоки 5-12. На входы блока 5 поступают аналоговые сигналы с входа и выхода объекта, а также измеряемого возмущения, которые преобразуются в цифровую форму и подаются на вход блока 6 идентификации параметров модели объекта в виде
h
У -У а. у +111 . + ZIIc.V
7ГГ - trr tr 7
30
(3)
35
ответствии с законом
где V - измеряемое возмущение на
входе объекта; а,
с. - коэффициенты полиномов авторегрессивной модели скользящего среднего.
Порядок полиномов А, С равен m 2,3; порядок полинома В равен m+d, где с1 - максимально возможное время запаздывания объекта, лирования с выхода элемента 2 сравне- Q реализует процедуру оценки ния, которая используется для выра- коэффициентов а-., b V, с. на каждом ботки управляющего воздействия в со- периоде дискретизавди в соответствии
с новыми измерениями входа, выхода
.. / f возмущения объекта с помощью раси LR( У,) - Ф(k+ d,k} J/Q, (1) j щцренного рекуррентного метода наи- измерения входа и выхода 1,еньших квадратов. Модель (3) учитывает все возможные значения времени запаздывания EI определяемом экспериментально диапазоне значений d зт 50 нуля до d , но она не подходит для вычисления коэффициентов регулятора из-за высокого порядка. Вычислительная процедура становится слишком сложной. Поэтому для этой цели истичной ошибки предсказа- пользуется модель низкого порядка ние выхода объекта, оп- , „„„о
где и
Y -
SK d
объекта в момент k; ошибка регулированияi дискретное время запаз- дывания объекта, равное целому числу периодов дискретизации измерений , Ф(k+ d,,k)- оптимальное в смысле минимума среднеквадраределяемое уравнением
mm+c/
oA(k+d,k)-E:f,Y.,+11: g.u.,. +
« -& - Ь --.
i;0
i 0
(4)
+ )Ф/ (k + d-i,k-i),
(2)
где f., g.
с -коэффициенты регуля- ра, настраиваемые в соответствии с изменением динамических характеристик объекта;
m - порядок модели объекта;
R, Q - коэффициенты настройки регулятора на требуемую точность и скорость отслеживания задания.
Второй контур предназначен для настройки коэффициентов регулятора в соответствии с изменением динамических характеристик объекта и содержит блоки 5-12. На входы блока 5 поступают аналоговые сигналы с входа и выхода объекта, а также измеряемого возмущения, которые преобразуются в цифровую форму и подаются на вход блока 6 идентификации параметров модели объекта в виде
h
У -У а. у +111 . + ZIIc.V
7ГГ - trr tr 7
(3)
где V - измеряемое возмущение на
« -& - Ь --.
(4)
где d - оценка истинного времени запаздывания объекта. Для оценки d используется метод вычисления и сравнения весовых функций объекта по модели (3) и по модели (4), причем по модели (4) вычисляются импульсные характеристики для каждого значения d. ; в диапазоне О, ..., выходов блока 6 идентификации параметров объекта оценки а., Ь, с. коэффициентов модели (3) поступают на входы блоков 7, 8, 11 и 12, В блоке 7 вычисляется весовая функция H(Z) (2) объекта как обратное Z-преобразование модели (3), т.е.
h
ЬЛ ьл - а b.
1 2 1
С выхода блока 7 отсчеты весовой функции (5) поступают на вторые входы блока 8 вычисления весовой функции по модели низкого- порядка, на первые 25 входы которого подаются оценки коэф ч
фициентов а , Ь. из блока 6 идентификации. В блоке 8 реализуется процедура обратного Z-преобразования для модели (4), в результате чего опре- 30 деляются отсчеты весовой функции для модели низкого порядка (4)
h, h ... h 0;
л
h
d + 1
...h.
h
h , - b .
hT + cr+i m + d + i
Весовые функции (6) вычисляются для всего диапазона значений времени
-Л
запаздывания О, ..., d - 1.
Отсчеты весовых функций, вычисленные в блоках 7 и 8, подаются в блок 9 для на:хождения функции ошибок S (d;-), определяемой соотношением .i л
Псь);
S(di)
О, k d; +1, ... d. + m; (7)
- 1,
Пш -iv)s
.1
L Vd, 0, ... d, де N T /T, ;
Т
уэ
характеристикой 95% установившегося значенияi Tj - период дискретизации.
95 -S . 55
- время достижения переходной
Значения функции ошибок S(d р поступают в блок 10, где определяется минимальное значение
S
. (d;) min{s(d. )1 ,V-d., . . .d,- 1.
Значение d;, при котором S(dj) принимает мин1«.1альное значение, является искомой оценкой времени запаздывания объекта. Она передается на третий вход блока 11, на второй вход которого подшотся отсчеты весовой функции H(Z) из блока 7, а на третий - коэффициенты а; из блока 6. В блоке 11 вычисляются оценки коэффициентов bj модели (4) в соответствии с уравнениями
35
40
45
50
55
20
25 30
b h ; 1 1 d
b, Ц, ,
(8)
кото рыё вместе с оценкой d времени запаздывания подаются на вторые входы блока 12 настройки коэффициентов регулятора, на первые в..оды которого подаются значения коэфф1щиентов З; , с,- из блока 6 рщентификации. В блоке 12 обновляются коэффициенты f , g., с- о регулятора (2) в соответствии с новыми коэффициентa iи модели а. , 6 , с- , которые характеризуют динамику объ- екта в данный момент времени. Коэффициенты регулятора fj, g, с и оценка d времени запаздывания подаются на второй вход регулятора 3, который реализует закон управления (1).
Таким образом, замкнутый контур регулирования является адаптивным по отношению к переменным динамическим характеристикам объекта, включая время запаздывания, что способствует существенному повышению динамической точности стабилизации выхода объекта на задаваемом уровне.
Исполъзование изобретения позволяет увеличить динамическую точность регулирования выходной переменной в условиях нестационарности динамических характеристик объекта и влияния измеряемых входных возмущений. Точность регулирования выходной переменной объекта в условиях медленного изменения его динамических характеристик выше по сравнению с классическим алгоритмом НЦУ на 20-40%.
ормула
и
5 3 о
12
бретения
Адаптивная система управления объектами с запаздьгоанием, содержащая последовательно соединенные задат- чик, элемент сравнения, регулятор, объект управления, выход которого соединен с вычитающим входом элемента сравнения, отличающаяся тем, что, с целью повышения качества управления и расширения функциональных возможностей, в нее введены блок аналого-цифровых преобразователей, первый и второй входы которого соединены соответственно с входом и выходом объекта, третий вход - с входом возмущающего воздействия, а выходы - с входами блока идентификации параметров математической модели объекта управления, выходы которого соединены с входами блока вычисления весовых функций объекта по модели высокого порядка, блока вычисления
Редактор И.Рыбченко Заказ 779/50
Составитель В.Башкиров
Техред А.Кравчук Корректор Н.Король
Тираж 864 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
1297009
весовых функций объекта по модели низкого порядка, блока оценки параметров модели низкого порядка и блока настройки коэффициентов регулятора,
вторые входы которого соединены с выходами блока оценки параметров модели низкого порядка, а выходы - с входами регулятора, выходы блока вычисления весовых функций объекта по
модели низкого порядка соединены с входами блока нахозкдения функции ошибок, вторые входы которого соединены с выходами блока вычисления весовых функций объекта по модели высокого
порядка и с вторьми входами блока вычисления весовых функций объекта по модели низкого порядка и блока оценки параметров модели низкого порядка, а выходы - с входами блока
оценки истинного времени запаздывания объекта, выходы которого соединены с третьими входами блока оценки параметров модели Низкого порядка.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНАЯ ЦИФРОВАЯ СИСТЕМА УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМИ ТЕХНОЛОГИЧЕСКИМИ ОБЪЕКТАМИ | 2000 |
|
RU2166788C1 |
| Устройство для регулирования объекта с запаздыванием | 1977 |
|
SU911463A1 |
| Система автоматического управления блоком кристаллизаторов в производстве парафинов | 1985 |
|
SU1346179A1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ОПТИМАЛЬНОЙ ИМПУЛЬСНОЙ НАСТРОЙКИ СИСТЕМЫ УПРАВЛЕНИЯ | 2006 |
|
RU2384872C2 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2015 |
|
RU2612340C1 |
| АДАПТИВНАЯ ЦИФРОВАЯ КОМБИНИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМИ ТЕХНОЛОГИЧЕСКИМИ ОБЪЕКТАМИ | 2001 |
|
RU2211470C2 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ИДЕНТИФИКАТОРОМ И ЭТАЛОННОЙ МОДЕЛЬЮ | 2001 |
|
RU2191419C1 |
| СИСТЕМА ИДЕНТИФИКАЦИИ ОБЪЕКТОВ УПРАВЛЕНИЯ | 2012 |
|
RU2486563C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ИДЕНТИФИКАТОРОМ И НЕЯВНОЙ ЭТАЛОННОЙ МОДЕЛЬЮ | 1994 |
|
RU2108612C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ИДЕНТИФИКАТОРОМ И НЕЯВНОЙ ЭТАЛОННОЙ МОДЕЛЬЮ ПРИ ВРЕМЕННЫХ ЗАДЕРЖКАХ ИНФОРМАЦИИ В СИСТЕМЕ УПРАВЛЕНИЯ | 2001 |
|
RU2192031C1 |
Изобрете ние относится к системам автоматического управления объектами с нестационарными динамическими характеристиками, включая время запаздывания, и может быть использовано в промышленности и при исследовании характеристик объектов с неизвестными параметрами. Цель изобретения - повышение качества управления и расширение функциональных возможностей. Адаптивная система управления тами с запаздыванием содержит задат- чик 1, элемент 2 сравнения, регуля- top 3, объект управления 4, блок 5 аналого-цифровых преобразователей, блок 6 идентификации параметров математической модели объекта управления, блок 7 вычисления весовых функций по модели высокого порядка, блок 8 вычисления весовых функций по модели низкого порядка, блок 9 нахождения функции ошибок, блок 10 оценки истинного времени запаздывания объекта, блок 11 оценки параметров модели низкого порядка, блок 12 настройки коэффициентов регулятора. Цель изобретения достигается за счет введения блоков 5-12. 1 ил. с 9 сл to г о о со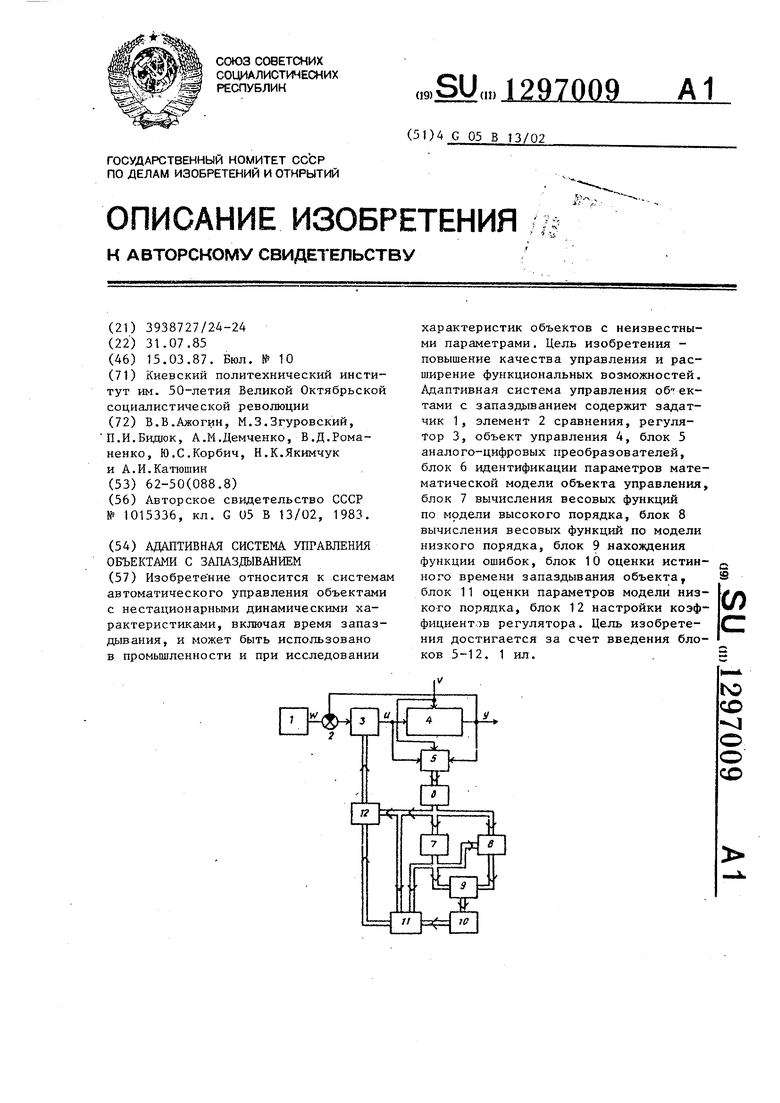
| Адаптивная система управления для объектов с запаздыванием | 1980 |
|
SU1015336A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
