10
Изобретение относится к приборостроению, а именно к манипуляторам, и может быть использовано для биологических исследований, а также в других отраслях науки и техники, где требуется осуществление точных переменлений.
Цель изобретения - повышение точности контроля перемещения микроинструмента.
На чертеже схематично изображен мик- романинулятор.
Микроманипулятор содержит корпус 1, в котором закреплен пьезопреобразователь 2, выполненный в виде пьезокерамического столба, который через изолирующую муфту 3 соединен с другим пьезопреобразо- вателем 4, выполненным в виде пьезокерамического кольца, пьезокерамическую мемб- 5 рану 5, жестко соединенную через изолирующую муфту 3 с ньезопреобразователем 4, в центре которой закреплен электрод 6, выполненный в виде металлической пластинки, покрытой тонкой анодированной алюминиевой пленкой. С другого конца пьезо- нреобразователя 4 через изолирующую муфту 7, перпендикулярно электроду 6, закреплен другой электрод 8, выполненный в виде металлического заостренного стержня.
20
го напряжения - микроа.мперметр 1 1 - электрод 8 возникает туннельный ток, сила которого экспоненциально зависит от расстояния между концом иглового электрода 8 и поверхностью алюминиевой пленки на полированной пластинке 6. При этом незначительное изменение этого расстояния вызывает значительные изменения туннельного тока.
Для точного наведения микроинструмента 9 подают напряжение от источника питания (не показан) в пьезопреобразователь 4, который, деформируясь, смещает микроинструмент 9. При смепдении микроинструмента 9 меняется расстояние между электродом 8 и электродом 6, тем самым меняется туннельный ток, показываемый микроамперметром 11, щкала которого выполнена, учитывая экспоненциальную зависимость туннельного тока от расстояния между электродами 6 и 8. Таким образом, путем измерения туннельного тока, показываемого микроамперметром 11, можно судить о достоверности перемещения микроинструмента.
Обеспечение достоверности позиционирования, осуществляе.мое с помощью туннельного явления, позволяет повысить точК изолирующей муфте 7 закреплен микро- 25 ность перемец;ения микроинструмента по
сравнению с известным устройством, так как при осуществлении перемещения микроинструмента 9 учитываются и элиминируются случайные явления и нестабильности, которые имеют больщое значение для точности 30 позиционирования микроинструмента.
Формула изобретения Микроманинулятор, включающий корпус.
инструмент 9. Электроды 6 и 8 подключены к источнику 10 постоянного напряжения, при этом последовательно подключен микроамперметр 11. Пьезопрёобразователи 2 и 4 и пьезокерамическая мембрана 5 подключены к источнику напряжения (не показано).
Микроманипулятор работает следующим образом.
Подается напряжение на пьезопреобразователь 2, который, деформируясь, осуществляет грубое паведение микроинстру- 35 два пьезопреобразователя, один из которых мента 9. Величина деформации пьезопреобразователя 2 пропорциональна подаваемому напряжению.
Путем подачи напряжения от источника iO постоянного напряжения создают разность потенциалов между электрода.ми 6 и 8, после чего от источника питания (не показан) подают напряжение на пьезокерамическую мембрану 5 таким образом, чтобы она, дефор.мируясь, приближала полированную пластинку 6 к электроду 8 до погруже- пия конца иглового электрода 8 в окисел алюминиевой пленки, которой покрыта полированная пластинка 6. В цепи: полированная пластинка 6 - источник 10 постоянно40
связан с микроинструментом, а другой закреплен в корпусе, отличающийся тем, что, с целью повыщения точности контроля перемещения микроинстру.мента, микро- .манипулятор дополнительно снабжен пьезо- керамической мембраной, установленной на пьезопреобразователе, закрепленно.м в корпусе, электродами, один из которых выпол- пен в виде полированной пластинки, покрытой алюминиевой пленкой, и соединен с пье- 45 зокерамической мембраной, а другой выполнен в виде металлического заостренного стержня и связан с микроинструментом, при этом электродь через токоизмерительный прибор подключены к источнику напряжения.
5
0
го напряжения - микроа.мперметр 1 1 - электрод 8 возникает туннельный ток, сила которого экспоненциально зависит от расстояния между концом иглового электрода 8 и поверхностью алюминиевой пленки на полированной пластинке 6. При этом незначительное изменение этого расстояния вызывает значительные изменения туннельного тока.
Для точного наведения микроинструмента 9 подают напряжение от источника питания (не показан) в пьезопреобразователь 4, который, деформируясь, смещает микроинструмент 9. При смепдении микроинструмента 9 меняется расстояние между электродом 8 и электродом 6, тем самым меняется туннельный ток, показываемый микроамперметром 11, щкала которого выполнена, учитывая экспоненциальную зависимость туннельного тока от расстояния между электродами 6 и 8. Таким образом, путем измерения туннельного тока, показываемого микроамперметром 11, можно судить о достоверности перемещения микроинструмента.
Обеспечение достоверности позиционирования, осуществляе.мое с помощью туннельного явления, позволяет повысить точсравнению с известным устройством, так как при осуществлении перемещения микроинструмента 9 учитываются и элиминируются случайные явления и нестабильности, которые имеют больщое значение для точности позиционирования микроинструмента.
Формула изобретения Микроманинулятор, включающий корпус.
пьезопреобразователя, один из которых
два пьезопреобразователя, один из которых
связан с микроинструментом, а другой закреплен в корпусе, отличающийся тем, что, с целью повыщения точности контроля перемещения микроинстру.мента, микро- .манипулятор дополнительно снабжен пьезо- керамической мембраной, установленной на пьезопреобразователе, закрепленно.м в корпусе, электродами, один из которых выпол- пен в виде полированной пластинки, покрытой алюминиевой пленкой, и соединен с пье- зокерамической мембраной, а другой выполнен в виде металлического заостренного стержня и связан с микроинструментом, при этом электродь через токоизмерительный прибор подключены к источнику напряжения.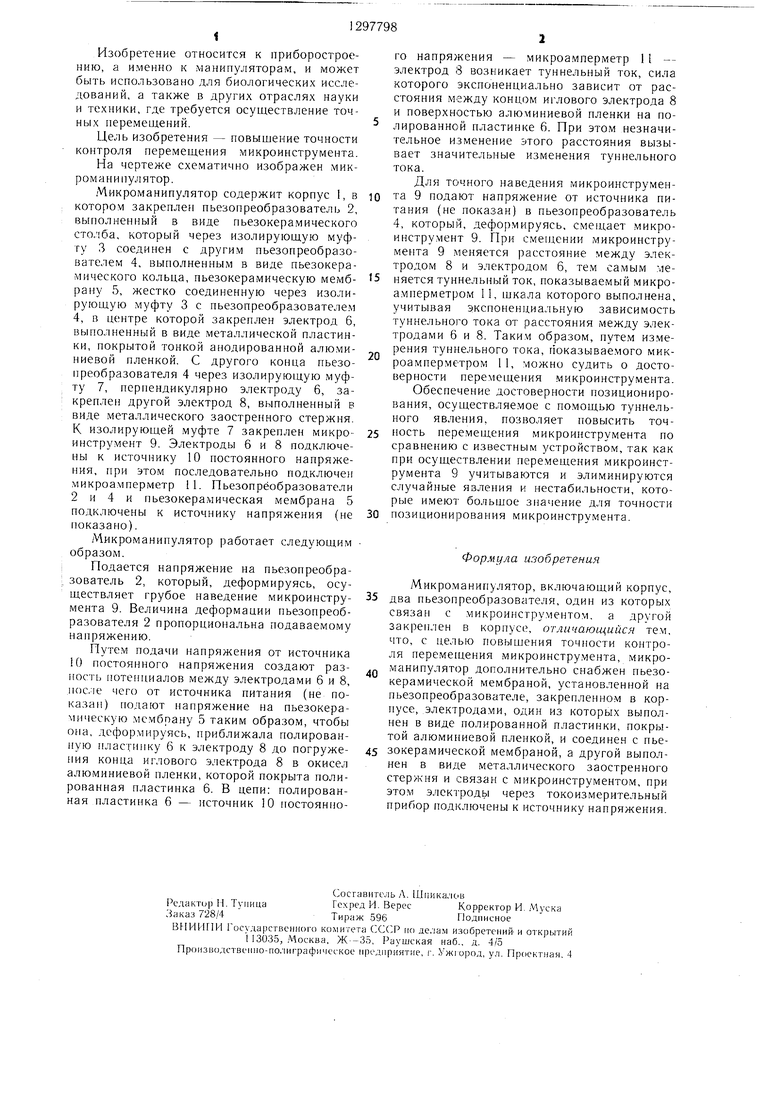
| название | год | авторы | номер документа |
|---|---|---|---|
| Растровый туннельный микроскоп | 1987 |
|
SU1471232A1 |
| МОБИЛЬНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ МИКРОРОБОТ | 1999 |
|
RU2164362C2 |
| Опора прямолинейного перемещения | 1979 |
|
SU863901A1 |
| Опора прямолинейного перемещения | 1981 |
|
SU949236A1 |
| УСТРОЙСТВО ЭЛЕКТРОСТАТИЧЕСКОГО УЛЬТРАЗВУКОВОГО РАСПЫЛЕНИЯ | 2024 |
|
RU2831473C1 |
| Сканирующий туннельный микроскоп | 1990 |
|
SU1797149A1 |
| СКАНИРУЮЩИЙ ТУННЕЛЬНЫЙ МИКРОСКОП | 1991 |
|
RU2018188C1 |
| Устройство углового позиционирования стола | 1981 |
|
SU1078677A1 |
| Вибродвигатель | 1981 |
|
SU968869A1 |
| Сканирующий туннельный микроскоп | 1987 |
|
SU1453475A1 |
Изобретение относится к медицинской технике и может быть использовано для осуществления точных перемещений при биологических исследованиях. Цель изобретения - повышение точности контроля перемещения микроинструмента. В корпусе 1 закреплен пьезопреобразователь 2. Г1ьез() мическая мембрана 5 соединена через изо.ш- рующую муфту 3 с пьезопреобразовате;1ем 4. Перпендикулярно электроду 6 закреп.чен электрод 8. В муфте 7 закреплен микроинструмент 9. Электроды 6 и 8 подключены к источнику постоянного напряжения 10. С помощью туннельного явления обеспечивается достоверность позиционирования, что позволяет повысить точность перемещения микроинструмента. 1 ил. NP СО СО ОО
| 1971 |
|
SU410775A1 | |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
