Изобретение относится к шинной промышленности и нредназначено для работы с тележками-этажерками при их загрузке и разгрузке.
Целью изобретения является расширение технологических возможностей за счет обеспечения работы с полками больших габаритов.
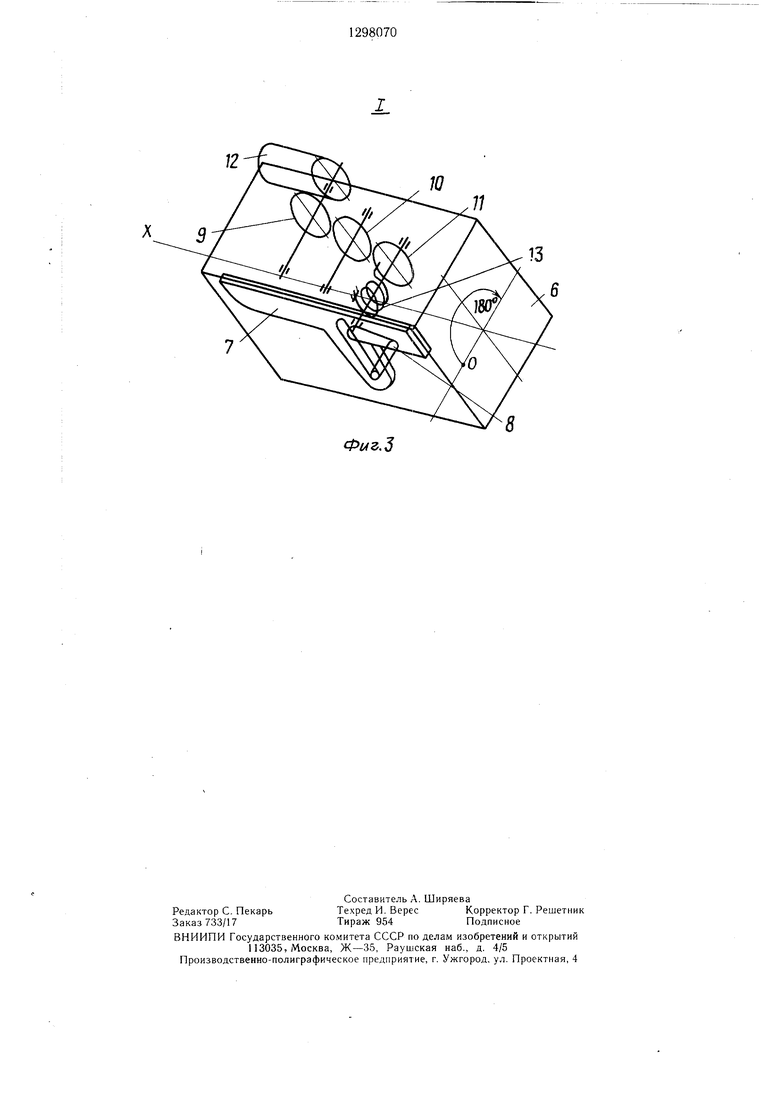
На фиг. 1 показан манипулятор, общий вид; на фиг. 2 - схема привода поворота рычагов; на фиг. 3 - узел I на фиг. 1. Манипулятор содержит основание 1, на колонках которого установлен корпус 2 с возможностью вертикального перемещения вдоль последних, и основной и дополнительный исполнительный органы, выполненные идентично друг другу. Каждый из исполнительных органов содержит рычаг 3, шарнирно установленный на кронштейне 4 и несущий на свободном конце рабочий орган, например толкатель 5. Каждый толкатель 5 выполнен в виде корпуса 6 с установленными в нем фиксатором 7, поводком 8, кинематически связанным с фиксатором 7 и валами-шестернями 9-11. На валу-шестерне 11 закреплен поводок 8, а на валу-шестерне 9 закреплен флажок 12. Вал- шестерня 10 соединен пружиной 13 с корпусом 6.
Кронштейны 4 связаны с корпусом 2 посредством параллелограммных механизмов 14 и перемещаются в горизонтальной плоскости с помощью пружин 15 и привода 16 горизонтального перемещения включающего силовой цилиндр, на штоке которого установлен блок, взаимодействующий с гибкой тягой 17, причем концы закреплены на рычагах параллелограммных механизмов 14, установленных в прорезях корпуса 2. Рычаги 3 кинематически связаны со штангой 18, имеющей регулируемые упоры 19, и кривошипным валом 20 с приводом 21 поворота, содержащим сдвоенные силовые цилиндры 22 и 23.
Основание 1 снабжено упором 24 для тележек-этажерок 25.
Манипулятор работает следующим образом.
Исходным положением манипулятора является крайнее верхнее положение корпуса 2 относительно оснований 1. Шток силового цилиндра привода 16 горизонтального перемещения втянут. Тележка-этажерка 25, подготовленная к загрузке (все полки подняты, положение а на фиг. 2), прижимается задней частью к упору 24 и фиксируется. Затем корпус 2 перемещается в нижнее положение.
Шток си 1ового цилиндра привода 16 выдвигается, натяжение гибкой тяги 17 ослабевает и кронштейны 4 начинают сближаться под действием пружин 15. Кронштейны 4 с рычагами 3 и толкателями 5 при этом остаются параллельны друг другу благодаря параллелограммным механизмам 14,
соосное сближение которых обеспечивается пазами, выполненными в корпусе 2 и расположенными также соосно. Регулирующие упоры 19 штанги 18 ограничивают сближение кронштейнов 4, обеспечивая постоянное рабочее расстояние между толкателями 5. Это расстояние определяется длиной полки тележки-этажерки 25 и необходимыми рабочими зазорами между боковыми кромками полки и корпусами 6 толкателей 5. Таким
образом обеспечивается возможность осевого смещения щтанги 18 с регулируемыми упорами 19 и компенсация неточностей установки тележки-этажерки 25 относительно толкателей 5.
Шток силового цилиндра 22 привода 21 поворота выдвигается, кривошипный вал 20 поворачивается и устанавливает рычаги 3 в среднее положение.
Для опускания полки тележки-этажерки 25 выдвигается шток цилиндра 23 привода
0 21 поворота. Кривошипный вал 20 поворачивается, рычаги 3 устанавливаются параллельно полке. При этом боковые кромки полки нажимают на флажки 12 толкателей 5, которые поворачиваются и через валы-шестерни 9-11 и поводки 8 воздействуют на
фиксаторы 7. Последние выдвигаются из корпусов 6 толкателем 5 и располагаются над полкой. По сигналу датчиков (не показаны) штоки цилиндров 22 и 23 привода 21 поворота втягиваются, кривошипный вал 20
0 поворачивается, рычаги 3 возвращаются в горизонтальное положение с полкой тележки-этажерки 25, удерживаемой фиксаторами 7 толкателей 5. Затем вновь выдвигается щток цилиндра 22, рычаги 3 поворачиваются в среднее положение, флажки
5 12 соскальзывают с боковых кромок полки и под действием пружин 15 поворачиваются относительно корпусов 6 толкателей 5 и воздействуют посредством валов-шестерен 9- 11 и поводков 8 на фиксаторы 7. Последние втягиваются в корпуса 6.
0 Для опускания следующей полки корпус 2 перемещается вверх на расстояние, равное расстоянию между соседними полками.
Для использования манипулятора для подъема полок тележек-этажерок при их разгрузке толкатели 5 необходимо повернуть на 180° относительно их общей продольной оси.
Подъем полки осуществляется следующим образом. Сближение толкателей 5 проQ изводится в верхнем положении корпуса 2. Шток цилиндра 22 втянут, а шток цилиндра 23. выдвинут. Затем корпус 2 опускается до верхней полки тележки-этажерки 25. Для захвата полки втягивается щток цилиндра 23 привода 21 поворота, кривощипный
5 вал 20 поворачивается, рычаги 3 устанавливаются в горизонтальное положение. При этом боковые кромки полки нажимают на флажки 12 толкателей 5, которые поворачиваются и через валы-шестерни 9-11 и поводки 8 воздействуют на фиксаторы 7. Последние выдвигаются из корпусов 6 толкателей 5 под полку. По сигналу датчиков штоки цилиндров 22 и 23 привода 21 поворота выдвигаются, кривошипный вал 20 поворачивается и устанавливает в верхнее положение рычаги 3 с полкой, удерживаемой фиксаторами 7. Затем шток цилиндра 22 втягивается, рычаги 3 поворачиваются в среднее положение, флажки 12 соскальзывают с боковых кромок полки и под действием пружин 13 поворачиваются относительно корпусов 6 толкателей 5. Фиксаторы 7 втягиваются в корпуса 6.
Для подъема следуюшей полки корпус 2 опускается на величину шага между полками.
Манипулятор сохраняет работоспособность при отсоединении одного из рычагов 3 (при работе с малогабаритными тележками-этажерками). При этом свободный конец гибкой тяги закрепляется на корпусе 2. Последовательность работы не меняется.
При использовании манипулятора совместно с подъемником тележек-этажерок
корпус 2 фиксируется на нужной высоте относительно основания 1.
Формула изобретения
Манипулятор, содержащий основание, корпус, установленный на основании с возможностью вертикального перемещения, и основной исполнительный орган, включающий кронштейн и рычаг с рабочим органом, шарнирно установленный на кронштейне, привод горизонтального перемещения и привод поворота исполнительного органа, отличающийся тем, что, с целью расширения технологических возможностей за счет обеспечения работы с полками больших габаритов, он снабжен дополнительным исполнительным органом, выполненным идентично основному, и штангой, при этом кронштейны связаны с корпусом посредством па- раллелограммных механизмов и кинематически - с приводом горизонтального перемещения, а на концах рычагов выполнены прорези, в которых установлены концы штанги с регулируемыми упорами, а ее средняя часть кинематически связана с приводом поворота.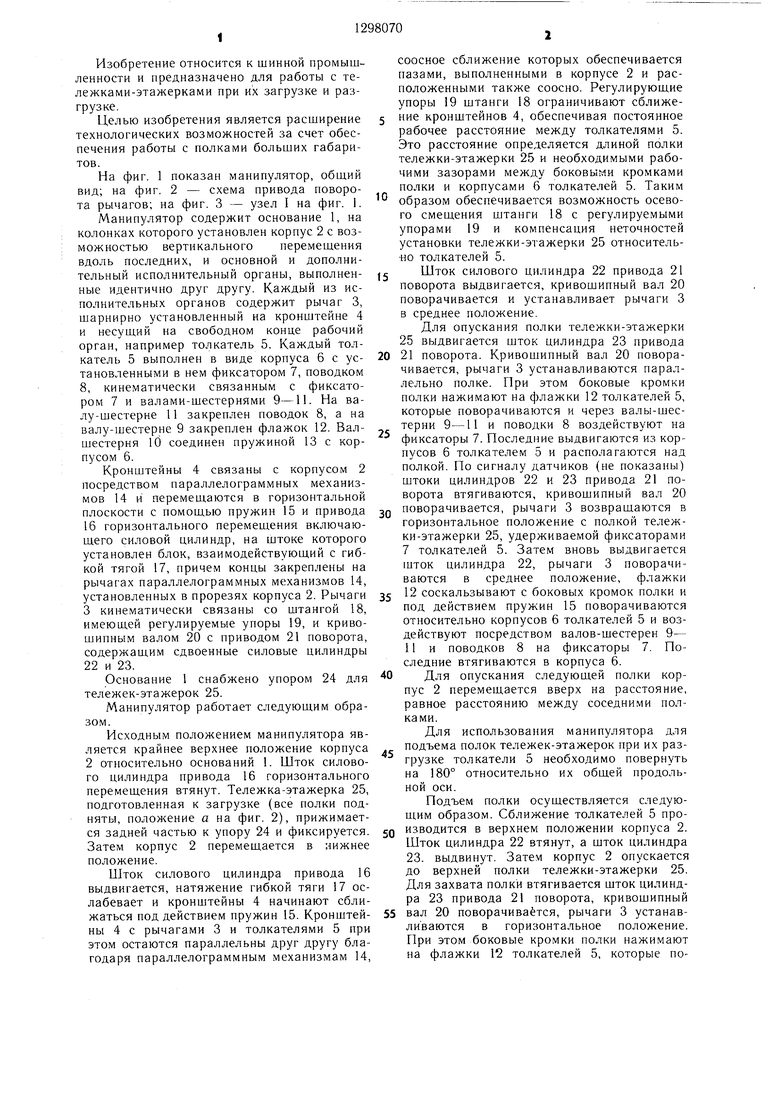

| название | год | авторы | номер документа |
|---|---|---|---|
| Предохранительное устройство подъемника | 1984 |
|
SU1208010A1 |
| УСТАНОВКА ДЛЯ ТЕРМИЧЕСКОЙ ОБРАБОТКИ УПЛОТНЯЮЩЕЙ ПАСТЫ | 1967 |
|
SU201234A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕЗАРЯДКИ ПОДВЕСНЫХ КОНВЕЙЕРНЫХ ЭТАЖЕРОК ВУЛКАНИЗАЦИОННОГОКОТЛА | 1970 |
|
SU420476A1 |
| Устройство для укладки заготовок | 1984 |
|
SU1199663A2 |
| Устройство для расцепления железнодорожных вагонов | 1988 |
|
SU1564032A1 |
| Манипулятор | 1986 |
|
SU1313690A1 |
| Устройство для загрузки и разгрузки шлакоблоков из пропарочных камер | 1951 |
|
SU107383A1 |
| Установка для формования бетонных изделий на поддонах | 1990 |
|
SU1763189A1 |
| ОСТАНОВ ДЛЯ ГРУЗОВЫХ ТЕЛЕЖЕК ПОДВЕСНОГО ТОЛКАЮЩЕГО КОНВЕЙЕРА | 1970 |
|
SU285611A1 |
| Устройство для передачи штучных грузов | 1988 |
|
SU1518253A1 |
Изобретение относится к шинной промышленности и предназначено для работы с тележками-этажерками при их загрузке и разгрузке. Целью изобретения; является расширение технологических возможностей за счет обеспечения работы с полками тележек-этажерок больших габаритов. Манипулятор содержит основание 1, установленный на нем корпус 2 с возможностью вертикального перемешения и идентичные основной и дополнительный исполнительные органы, включающие рычаги 3 с рабочими органами 5, шарнирно установленные на кронштейнах 4, связанных с корпусом 2 посредством параллелограммных механизмов 14 и кинематически - с приводом 16 горизонтального перемеш,ения. На концах рычагов 3 выполнены прорези, в которых установлена штанга 18 с регулируемыми упорами 19, причем средняя часть штанги 18 кинематически связана с приводом поворота 21. 3 ил. W (Л to ;о 00 15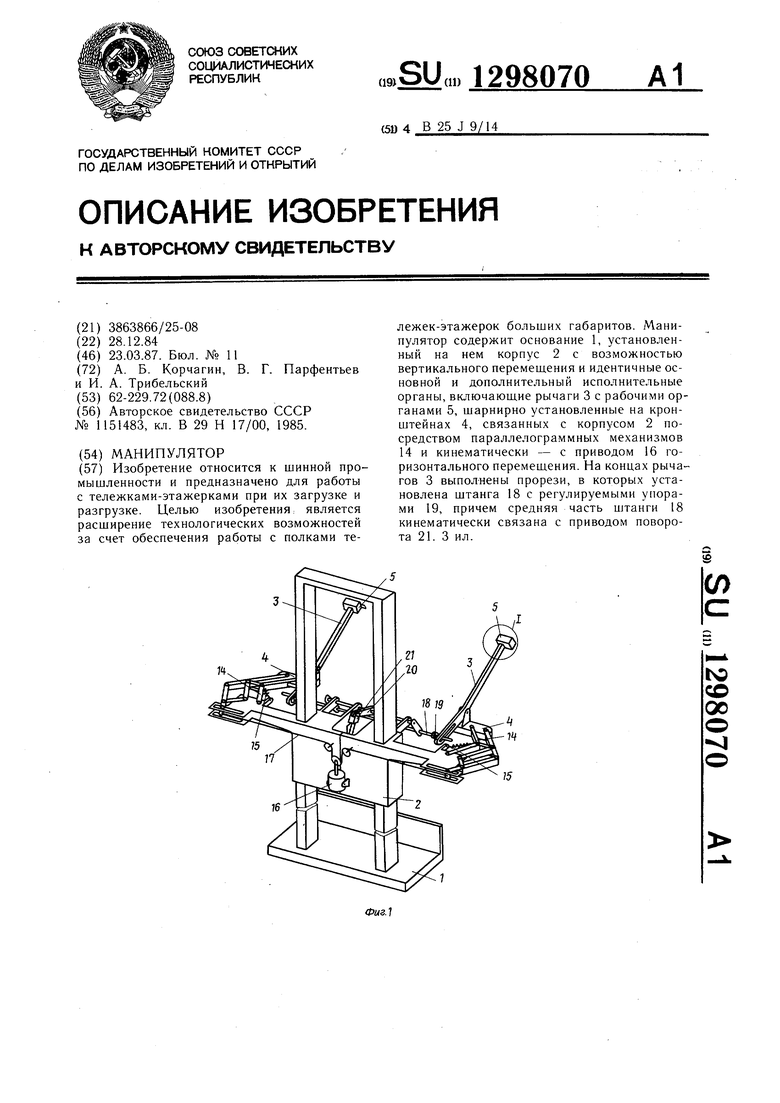
а
77
13
.З
| Авторское свидетельство СССР № 1151483, кл | |||
| Солесос | 1922 |
|
SU29A1 |
