а
g
СО
V
ел
00 to
ел
со
нен в виде неуравновешенных шарнирно установленных роликовых секций (PC) 14 с противовесами 15 и смонтированными на раме 13 ограничительными упорами 16 и 17. Полочный опускатель выполнен в виде гибких вертикально замкнутых тяговых органов с консольно закрепленными роликовыми полками (РП) 24, наклонными в сторону ПР 4, имеет JQ тормозной механизм 25 и ограничительную стенку 26 с проемом. Последняя расположена со стороны ПР 4. Грузы 18 подаются на этажерках подвесного кон- вейера. При этом PC 14 расположены . 15
одна над другой) и шаг между ними равен шагу между РП 24 и шагу между ;. полками этажерки. Грузы 18 забираются с полок этажерки захватами манипулятора и опускаются на PC 14. По- следние наклоняются в сторону полочного опускателя и груз 18 переходит на РП 24, упираясь в стенку 26. Груз 18 с нижней PC 14 переходит на ПР 4. Тормозной механизм растормаживается и РП 24 под действием грузов 18 опускается. После взаимодействия со стенкой 26 грузы 18 передаются на ГГР 4. 4 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для загрузки штучных грузов в этажерки подвесного конвейера | 1987 |
|
SU1502444A1 |
| Устройство для передачи изделий с рольганга на полочный конвейер | 1977 |
|
SU662452A1 |
| Транспортное средство для перевозки штучных грузов | 1977 |
|
SU695867A1 |
| ПЕРЕГРУЖАТЕЛЬ ТАРНО-ШТУЧНЫХ ГРУЗОВ | 2000 |
|
RU2203213C2 |
| Накопитель штучных грузов для поточных линий | 1977 |
|
SU719933A1 |
| Перегружатель штучных грузов | 1982 |
|
SU1022876A1 |
| Линия для лакирования и сушки щитовых изделий | 1979 |
|
SU856581A1 |
| Штабелеукладчик для штучных грузов | 1983 |
|
SU1144956A1 |
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНО-СКЛАДСКАЯ СИСТЕМА ДЛЯ КОЛЕСНЫХ ШИН | 1990 |
|
RU2013327C1 |
| Устройство для погрузки и разгрузки изделий, транспортируемых на полках подвесного конвейера | 1980 |
|
SU882892A1 |
Изобретение относится к промышленному транспорту и позволяет повысить производительность при передаче грузов с полок этажерок подвесного конвейера. Устройство включает подающее приспособление в виде манипулятора, перегружатель 2, расположенный на выходе последнего гравитационный полочный опускатель и приемный рольганг (ПР) 4. Перегружатель 2 выполнен в виде неуравновешенных шарнирно установленных роликовых секций (РС) 14 с противовесами 15 и смонтированными на раме 13 ограничительными упорами 16, 17. Полочный опускатель выполнен в виде гибких вертикально замкнутых тяговых органов с консольно закрепленными роликовыми полками (РП) 24, наклонными в сторону ПР 4, имеет тормозной механизм 25 и ограничительную стенку 26 с проемом. Последняя расположена со стороны ПР 4. Грузы 18 подаются на этажерках подвесного конвейера. При этом РС 14 расположены одна над другой и шаг между ними равен шагу между РП 24 и шагу между полками этажерки. Грузы 18 забираются с полок этажерки захватами манипулятора и опускаются на РС 14. Последние наклоняются в сторону полочного опускателя и груз 18 переходит на РП 24, упираясь в стенку 26. Груз 18 с нижней РС 14 переходит на ПР 4. Тормозной механизм растормаживается и РП 24 под действием грузов 18 опускается. После взаимодействия со стенкой 26 грузы 18 передаются на ПР 4. 4 ил.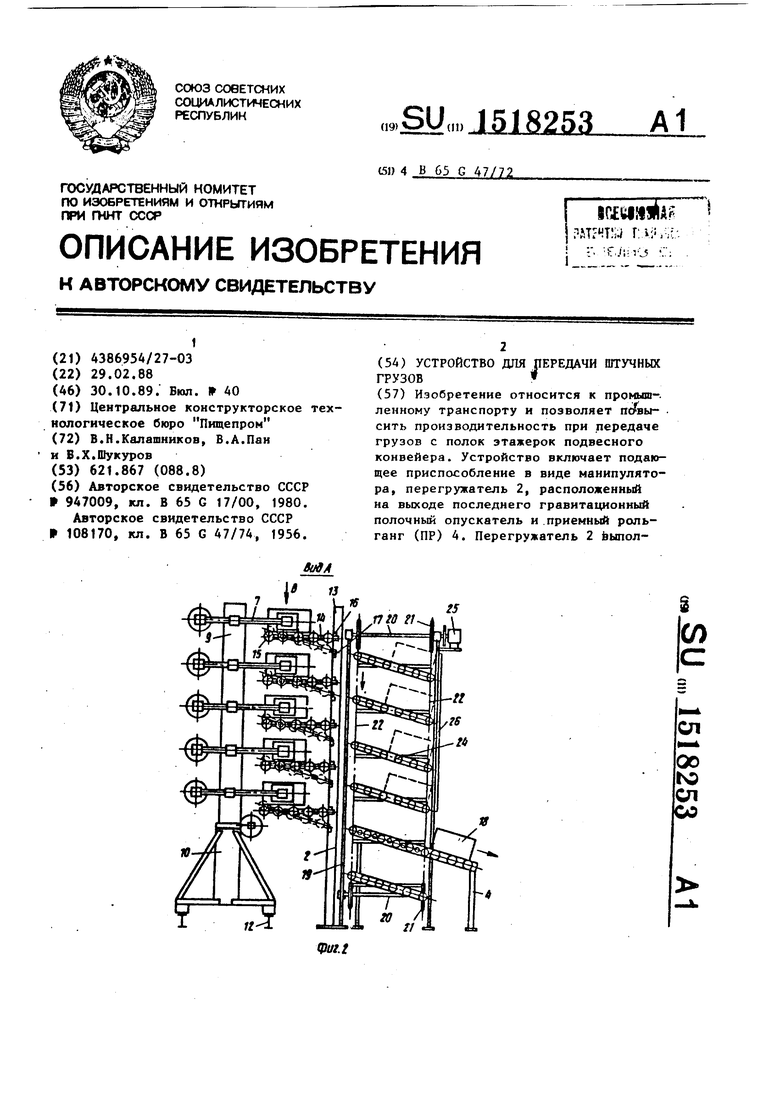
Изобретение относится к промьш- ленному транспорту, а именно к устройствам для разгрузки штучных грузов с этажерки подвесного конвейера, и может быть использовано в различных отраслях промьшшенности.
Целью изобретения является повышение производительности при передаче грузов с полок этажерок подвесного конвейера.
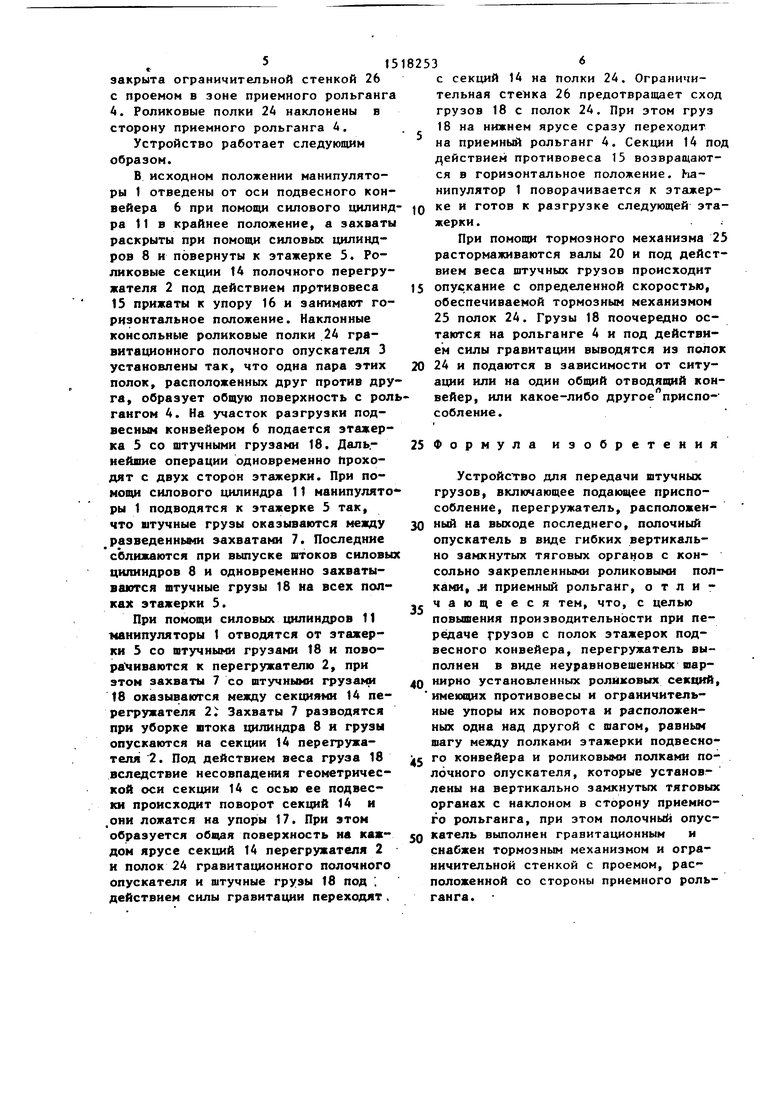
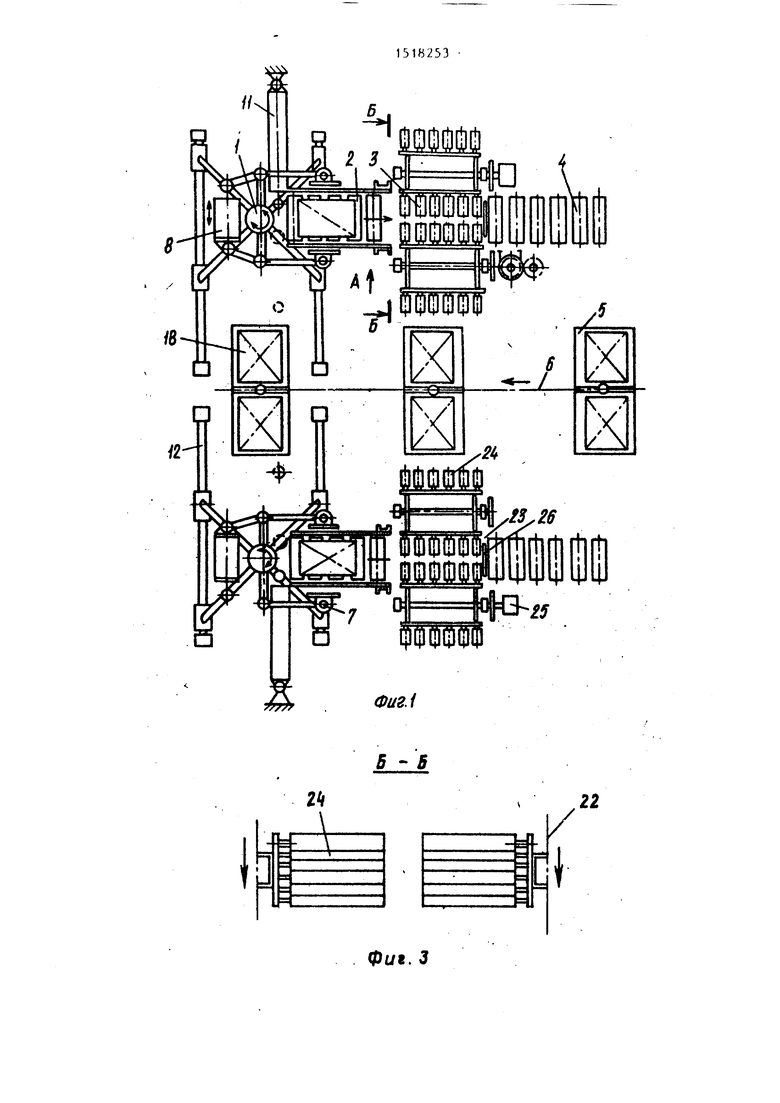
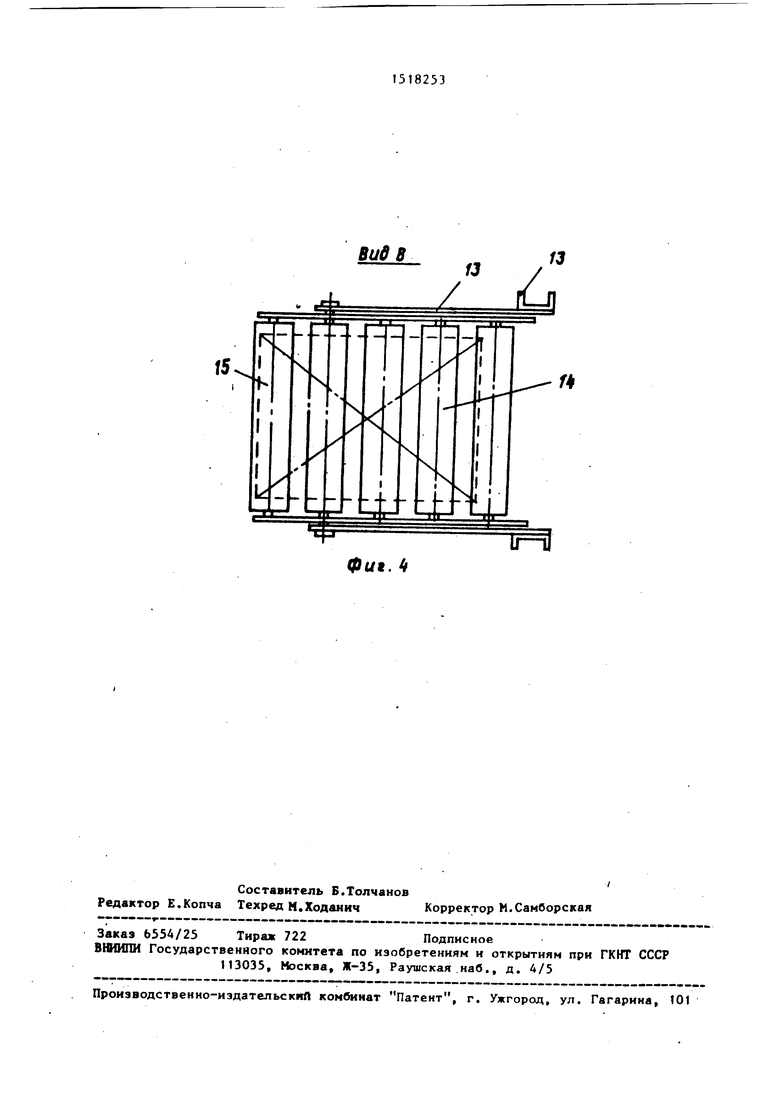
На фиг.1 изображено предлагаемое устройство, вид сверху; на фиг.2 - вид А на фиг.1; на фиг.З - разрез Б-Б на фиг.Ц на фиг. 4 - вид В на фиг.2. Устройство содержит подающее приспособление в виде многозахватных манипуляторов 1, перегружатели 2, расположенные на их выходе гравитационные полочные опускатели 3, приемные рольганги 4, расположенные симметрично с двух сторон этажерки 5 подвесного конвейера 6. Многозахватный манипулятор 1 содержит клещевые захваты 7 с силовыми цилиндрами 8, установленные шарнирно на валу 9, в свою очередь шарнирно крепящегося к раме 10. Количество клещевых захватов 7 равно количеству ярусов этажерки 5. Привод перемещения и поворота вала выполнен в виде силового цилиндра 11, шарнирно соединенного с валом 9. Рама 10 установлена с возможностью перемещения на направлякшшх 12 перпендикулярно оси подвижного конвейера 6. Перегружатель 2 содержит раму 13, на которой шарнирно закреплены ролн- ковые секции 14. На каждой роликовой секции 14 установлен противовес 15, обеспечивающий неуравновешенность
полки относительно оси шарнирной подвески секции 14. На раме 13 у каждой секции установлены ограничительные упоры 16 и 17, ограничивающие пово-
5 рот сек1(Ий 14. При касании края секции 14 упора 16 обеспечивается горн зонтальное псшожение секции, а при касании упора 17 - наклонное положение секции 14, обеспечивающее надежQ ное скатывание штучного груза 18 по роликам секции под действием силы гравитации.
При этом геометрическая ось секции 14 не совпадает с осью шарнирf ной подвески ее, а вследствие этого секции 14 без груза 18 под действием противовесов 15 отклоняются таким образом, что края секции касаются упора 16 и секции находятся в гори
0 эонтальном положении а секции 14 со штучными грузами 18 также неуравновешены относительно оси подвески н поворачиваются до касания краев секций упора 17.
5 Гравитационный полочный опускатель 3 содержит раму 19, на которой закреплены валы 20 со звездочками 21. Все валы 20 связаны гибкими вертикально-замкнутыми тяговыми органаQ ми в виде цепей 22 и 23. На цепях 22 закреплены консольно роликовые полки 24 с шагом, равным шагу полок этажерки 5, причем на каждой ветви вертикальной цепи 22 консольные полки расположены друг напротив друга и при помощи цепи 23 обеспечивается их синхронное перемещение. Один из валов 20 соединен с тормозным мгхр- низмом 25. Задняя часть опускатрля 3
5
закрыта ограничительной стенкой 26 с проемом в зоне приемного рольганга А. Роликовые полки 2А наклонены в сторону приемного рольганга 4.
Устройство работает следуюпшм образом.
В исходном положении манипуляторы 1 отведены от оси подвесного конвейера 6 при помощи силового цилиндра 1 1 в крайнее положение, а захваты раскрыты при помощи силовых цилиндров 8 и повернуты к этажерке 5. Роликовые секции 14 полочного перегружателя 2 под действием прртивовеса 15 прижаты к упору 16 и занимают горизонтальное положение. Наклонные консольные роликовые полки 24 гравитационного полочного опускателя 3 установлены так, что одна пара этих полок, расположенных друг против друга, образует общую поверхность с ролгангом 4. На участок разгрузки подвесным конвейером 6 подается этажерка 5 со штучными грузами 18. Даль.- нейшие операции одновременно tipoxo- дят с двух сторон этажерки. При помощи силового цилиндра 11 манипулято ры 1 подводятся к этажерке 5 так, что штучные грузы оказываются мехду
разведенными захватами 7. Последние сближаются при выпуске штоков силовы цилиндров 8 и одновременно захватываются штучные грузы 18 на всех полках этажерки 5.
При помощи силовых цилиндров 11 манипуляторы 1 отводятся от зтажер- ки 5 со штучными грузами 18 и пово- ра Чиваются к перегружателю 2, при этом захваты 7 со штучными грузами 18 оказываются между секциями 14 перегружателя 2 Захваты 7 разводятся при уборке штока цилиндра 8 и грузы опускаются на секции 14 перегружателя . Под действием веса груза 18 вследствие несовпадения геометрической оси секции 14 с осью ее подвески происходит поворот секций 14 и
,они ложатся на упоры 17. При этом образуется общая поверхность на каждом ярусе секций 14 перегружателя 2 и полок 24 гравитационного полочного опускателя и штучные грузы 18 под ; действием силы гравитации переходят ,
с секций 14 на полки 24. Ограничительная 26 предотвращает сход грузов 18 с полок 24. При этом груз 18 на нижнем ярусе сразу переходит на приемный рольганг 4. Секции 14 под действием противовеса 15 возвращаются в горизонтальное положение, bia- нипулятор 1 поворачивается к этажер0 ке и готов к разгрузке следующей этажерки .
При помощи тормозного механизма 25 растормаживаются валы 20 и под действием веса штучных грузов происходит
5 опускание с определенной скоростью, обеспечиваемой тормозным механизмом 25 полок 24. Грузы 18 поочередно остаются на рольганге 4 и под действием силы гравитации выводятся из полок
0 24 и подаются в зависимости от ситуации или на один общий отводящий конвейер, или какое-либо другое приспо- собление.
5 Формула изобретения
Устройство для передачи штучных грузов, включающее подающее приспособление, перегружатель, расположенный на выходе последнего, полочный опускатель в виде гибких вертикально замкнутых тяговых органов с кон- сольно закрепленными роликовыми полками, л приемный рольганг, отличающееся тем, что, с целью повышения производительности при передаче ГРУЗОВ с полок этажерок подвесного конвейера, перегружатель выполнен в виде неуравновешенных шар- нирно установленных роликовых секций, имеющих противовесы и ограничительные упоры их поворота и расположенных одна над другой с шагом, равным шагу между полками этажерки подвесно го конвейера и роликовыми полками полочного опускателя, которые установлены на вертикально замкнутых тяговых органах с наклоном в сторону приемного рольганга, при этом полочный опус0 катель выполнен гравитационным и снабжен тормозным механизмом и ограничительной стенкой с проемом, расположенной со стороны приемного рольганга.
0
5
0
24
Фие.1
Б - б
22
ф1гг. 3
Вид В
Фи9. ц
| Загрузочно-разгрузочное устройство для многоярусных стеллажей | 1980 |
|
SU947009A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Транспортирующее устройство для передачи, книжных блоков с ленты транспортера блоко-обжимного пресса к заклеечному станку | 1956 |
|
SU108170A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
