Изобретение относится к устройствам для подачи обрабатываемых, обрабатываю цих и исполнительных элементов при длинноходо- вых перемещениях и может быть применено в металлообрабатывающей, станкостроительной, мащиностроительной, легкой, местной и других областях промьцнленности в робототехнологических комплексах для подачи заготовок из магазинов.
Цель изобретения - рас1пирепие технологических возможностей путем увеличения числа точек позиционирования рабочего органа.
На фиг. 1 приведена кинематическая схема манипулятора, аксонометрия; на фиг. 2 - манипулятор, продольный разрез; на фиг. 3 - схема перемещения рабочего органа манипулятора.
Манипулятор содержит привод 1 про дольного перемещения, снабженный штоком 2, на конце которого через тягу 3 шарнир- но закреплен рабочий орган 4.
Привод 1 закреплен на платформе 5 (кронштейн), которая через фиксатор б соединена с платформой 7, а пневмоцилиндр 8 своим ц током 9 входит в зацепление с шестерней 10, которая жестко закреплена на валу 11, принадлежащем платформе 5.
Платформа 7 также снабжена фиксатором 12, соединяющим ее с направляю1цей 13 основания, а нневмоцилиндр 14 своим штоком 15 входит в зацепление с шестерней 16, которая закреплена на валу 17, принадлежащем платформе 7.
Манипулятор работает следующим образом.
Привод 1 (силовой цилиндр) с выдвинутым штоком 2, на конце которого через тягу 3 шарнирно установлен рабочий орган 4, зафиксирован совместно с платформой 5 в крайнем положении при помощи фиксатора 6. Шток 2 втягивается, переме1цая при этом рабочий орган 4 на один niar. Фиксатор 6 разъединяет платформу 5 с платформой 7, а пневмоцилиндр 8 своим игго- ком 9 поворачивает шестерню 10, которая
ii COnsf
через вал 11 поворачивает платформу 5 на угол 180°. Фиксатор 6 вновь фиксирует платформу 5 в этом положении. Привод 1 выдвигает п1ток 2, перемещая рабочий орган 4 на второй шаг. Фиксатор 12 разъединяет платфор.чу 7 с направляющей 13 основания, а пневмоцилиндр 14 своим щто- ком 15 поворачивает шестерню 16, которая через вал 17 поворачивает платформу 7 на угол 180°. Фиксатор 12 вновь фиксирует платформу 7 в этом положении. Привод 1 втягивает шток 2, перемещая рабочий орган 4 на третий шаг. Фиксатор 6 разъединяет платформу 5, которая под действием пневмоцилиндра 8 возвращается в
исходное положение, т. е. поворачивается на 180°. Шток 2 выдвигается, перемещая рабочий орган на следующий шаг.
Конструкция манипулятора может иметь несколько поворотных платформ, 1ларнирно связанных между собой.
5
0
5
0
Формула изобретения
Манипулятор, содержащий рабочий орган,связанный со штоком силового цилиндра привода продольного перемещения и расположенный на основном кронштейне (платформе), связанном валом с основным приводом его поворота, отличающийся тем, что, с целью расширения технологических возможностей за счет увеличения числа точек позиционирования рабочего органа при его шаговых перемещениях, он снабжен дополнительными кронштейном и приводом его поворота, основанием и фиксаторами, один из ;- ;оторых расположен на основном кронштейне с возможностью взаимодействия с дополнительным кронштейном, а второй расположен на дополнительном кронштейне с возможностью взаимодействия с основанием, при этом оси вращения кронштейнов параллельны и отстоят дру|- от друга на величину niara (хода) силового цилиндра привода продо;1ьно 0 11ереме1цепия.
Н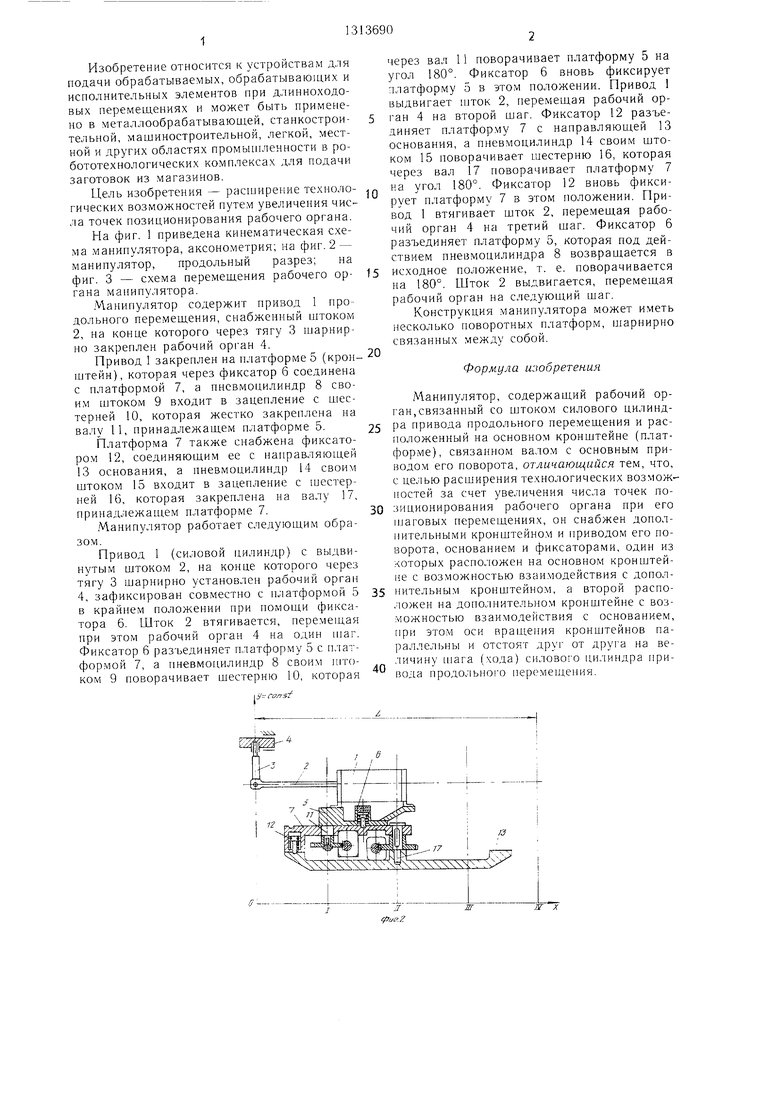
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1984 |
|
SU1298070A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| РОБОТИЗИРОВАННЫЙ МАНИПУЛЯТОР | 2003 |
|
RU2243881C2 |
| Кантователь | 1989 |
|
SU1703366A1 |
| Робототехнологический комплекс для сборки | 1990 |
|
SU1782203A3 |
| Промышленный робот | 1983 |
|
SU1155334A1 |
| Манипулятор для кладки стен из штучных элементов | 1989 |
|
SU1712561A1 |
| Манипулятор | 1982 |
|
SU1007967A1 |
| Устройство для подачи материала в рабочую зону пресса | 1987 |
|
SU1488075A1 |
| Автоматизированный комплекс для листовой штамповки | 1979 |
|
SU774722A1 |
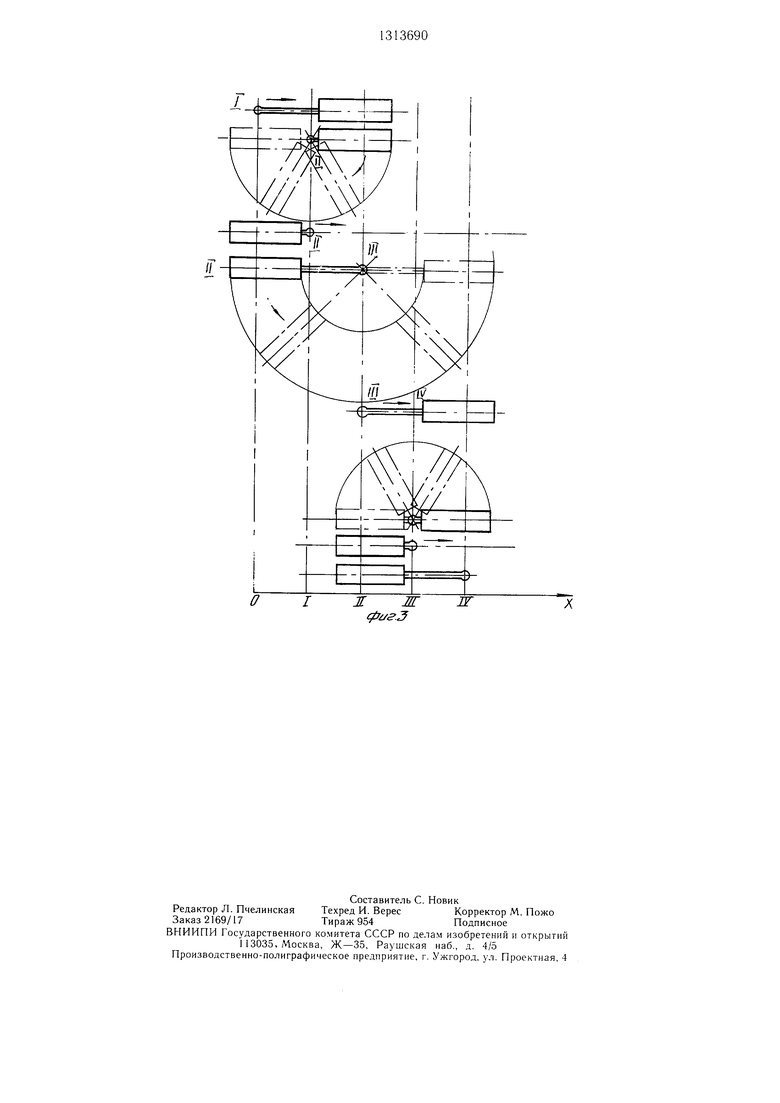
Изобретение относится к станкостроению и другим областям техники, где применяются робототехнологические комплексы, и предназначено для подачи деталей. Цель изобретения - увеличение числа точек позиционирования рабочего органа манипулятора при его шаговых перемешениях. Первая точка позиционирования получается при зафиксированных друг относительно друга соответственно платформ 5 и 7 (кронштейнов) и платформы 7 и направляющих 13 основания, когда шток 2 привода 1 выдвинут. Вторая точка получается при тех же положениях платформ 5 и 7 и направляющих 13, когда шток 2 привода втянут внутрь силового цилиндра. Затем фиксатор 6 рас- фиксирует платформы 5 и 7, платформа 5 поворачивается на 180° и вновь фиксируется. Третья точка позиционирования получается при выдвижении штока 2 при таком положении платформ 5 и 7. Затем фиксатор 12 расфиксирует платформу 7 и направляющие 13, платформа поворачивается на 180° и вновь фиксируется. Следующая точка позиционирования получается при втягивании штока 2 внутрь силового цилиндра. Затем платформы 5 и 7 вновь расфик- сируются, платформа 5 поворачивается на 180° и вновь фиксируется. Следующая точка позиционирования получается при выдвижении штока 2 в таком положении платформ 5 и 7 и направляющих 13. 3 ил. (О сл со оо Ci со
а
| Белянин П | |||
| Н | |||
| Промышленные роботы и их применение | |||
| - М.: Машиностроение, 1983, с | |||
| Приспособление, заменяющее сигнальную веревку | 1921 |
|
SU168A1 |
| Приспособление для получения кинематографических стерео снимков | 1919 |
|
SU67A1 |
