Изобретение относится к машиностроительной технике, а именно к захватным устройствам промышленных роботов, применяемых на механообрабатываюших и сборочных операциях, складировании штучных грузов и т. п.
Целью изобретения является повышение надежности.
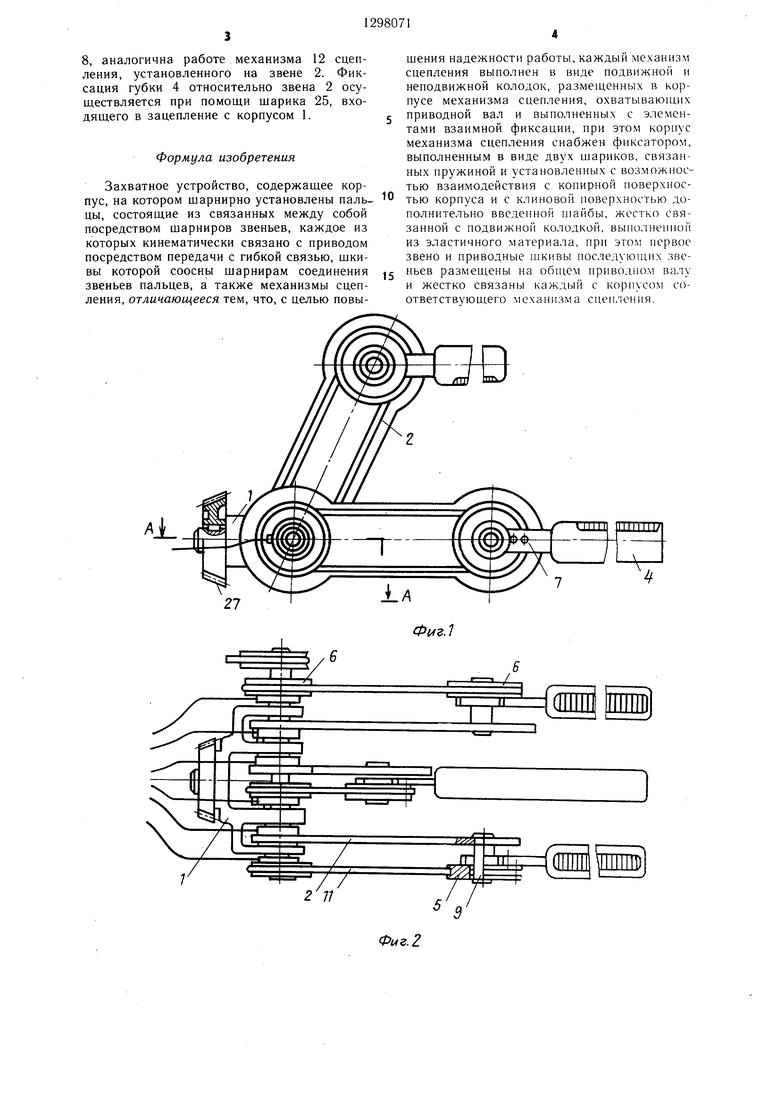
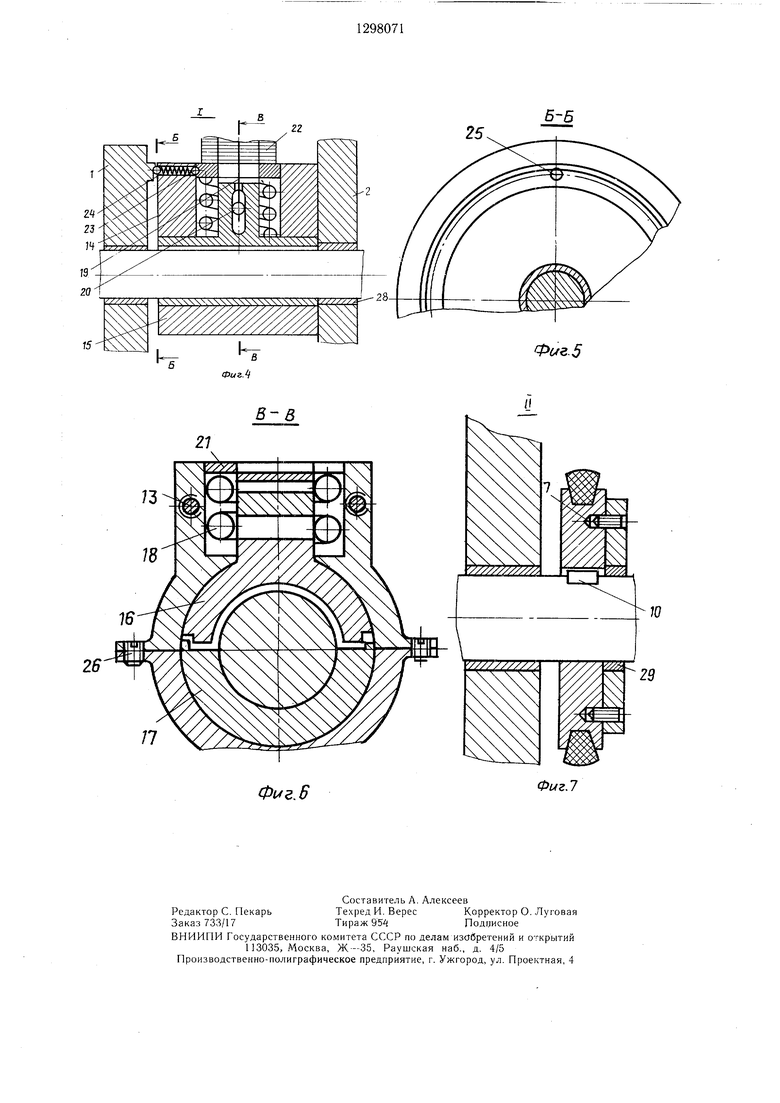
На фиг. I изображено захватное устройство; на фиг. 2 - то же, вид сверху; на фиг. 3 - сечение А-А на фиг. 1; на фиг. 4 - узел I на фиг. 3; на фиг. 5 - сечение Б-Б на фиг. 4; на фиг. 6 - сече ние В-В на фиг. 4; на фиг. 7 - узел И на фиг. 3.
Захватное устройство состоит из корпуса 1, на котором установлен рычаг управления (не показан) и на который насажена коническая шестерня. Звенья 2 соединены посредством приводного вала 3 с корпусом 1. Губки 4 жестко соединены с колесами 5 блоков клиноременных передач привода б посредством винтов 7. Шкивы 8 клиноременных передач привода 6 насажены на вал 3 свободно, а колеса 5 на оси 9 зафиксированы жестко посредством шпонок 10. Блоки колес 5 соединены клиноремен- ной передачей 11. На звеньях 2 возле вала 3 и на шкивах 8 установлены механизмы 12 сцепления, образуюш,ие жесткое соединение со звеньями 2, шкивами 8 клиноремен- ной передачи привода 6 посредством винтов 13.
В корпусах 14 и 15 механизмов сцепления установлены подвижная 16 и неподвижные 17 колодки, которые выполнены из эластичного материала с большим коэффициентом трения. Между корпусами 14 и колодками 16 установлены возвратные пружины 18. Колодки 16 верхними частями соединены с тросами 19. Трос 19 одним концом закреплен на оси 20, а другим связан с рычагом управления (не показан). Возвратные пружины 18 одним концом соединены с колодками 16, а другим - с нижней частью шайбы 21, которая верхней частью соединена с гибкой трубкой 22. В торцовую часть шайбы 21 упираются шарики 23, каждый из которых соединен с одним из концом возвратными пружинами 24. Возвратные пружины 24 другим своим концом соединены с шариками 25. Корпусы 14 и 15 соединены между собой винтами 26. На рычаг управления (не показан) насажена коническая шестерня 27. В звенья 2 и в корпусе 1 запрессованы бронзовые втулки 28. В отверстия тела губки запрессованы бронзовые втулки 29. На валу 3 установлен привод 30. Полость тонкостенной оболочки губки 4 заполнена вязкой жидкостью, например гидропластом. Захватное устройство в составе звеньев 2, корпуса 1, вала 3, механизмов 12 сцепления, установленных на звеньях 2, и шкивов 8 является многопальцевым.
0
5
Захватное устройство работает следующим образом.
Для поворота одного звена 2 относительно корпуса в заданное положение под небольшим углом поворачивают рычаг управления (не показан), в результате чего тянется трос 19, который своим усилием давит на гибкую трубку 22. Гибкая трубка 22 сжимается, создавая усилие, которое передается на шайбу 21. Шайба 21 передает усилие на возвратную пружину 18. Возвратная пружина 18 сжимается и п&редает усилие сжатия на колодку 16. Колодка 16 совершает поступательное движение вдоль корпуса 14, соприкасаясь своей рабочей поверхностью с рабочей поверхностью вала 3, -
5 они образуют неплотное соединение. Вал 3 при этом врашается от привода 30. В результате начинает поворачиваться звено 2 вместе с врашаюшимся валом 3 в заданное положение, а также тормозится (ограничивается) вращение вала 3, т. е. звено 2 с ограничиваемым ускорением приближается к поверхности захватываемой детали. Шарик 23, после того как шайба 21 опускается вместе с возвратной пружиной 18 вниз, выходит из отверстия корпуса 14, при этом освобождая от усилия сжатия возвратную пружину 24, а возвратная пружина 24 освобождает в гнезде корпуса 1 шарик 25. Звено 2 получает возможность повернуться относительно корпуса 1. Звено 2 в заданном положении останавливается сле0 дующим образом. Колодка 16 продолжает движение до соприкосновения ее рабочей поверхности с рабочей поверхностью вала 3, а также входит в зацепление своими выступами с выступами колодки 17, образуя плотное соединение. Вращение вала 3 и зве5 на 2 прекращается. Рычаг управления (не показан) необходимо вернуть в первоначальное положение, при этом трос 19 не давит на гибкую трубку 22. Гибкая трубка 22, освобождаясь от усилия сжатия, освобождает возвратную пружину 18. Возвратная пружина 18 разжимается и возвращает шайбу 21 и колодку 16 в первоначальное положение. Цилиндрическая поверхность щай- бы 21 в месте соприкосновения с шариками 23 имеет скос под углом и канавку, выполненную по форме шарика 23. Шарик 23 передает усилие сжатия на возвратную пружину 24. Возвратная пружина 24 передает усилие сжатия на шарик 25. Шарик 25 возвращается в исходное положение, т. е. в гнездо на корпусе 1, чем обеспечива0 ется фиксация звена 2 относительно корпуса 1. Вращение губки 4 осуществляется следующим образом. Рычаг управления (не показан) поворачивают на определенный угол, трос 19 сжимает трубку 22 аналогично тому, как это имело место при повороте звена 2 механизма 12 сцепления, установленного на звене 2. Работа механизма 12 сцепления, установленного в шкиве
0
5
55
8, аналогична работе механизма 12 сцепления, установленного на звене 2. Фиксация губки 4 относительно звена 2 осуществляется при помощи щарика 25, входящего в зацепление с корпусом 1.
Формула изобретения
Захватное устройство, содержащее корпус, на котором щарнирно установлены пальцы, состоящие из связанных между собой посредством щарниров звеньев, каждое из которых кинематически связано с приводом посредством передачи с гибкой связью, шкивы которой соосны щарнирам соединения звеньев пальцев, а также механизмы сцепления, отличающееся тем, что, с целью повышения надежности работы, каждый механизм сцепления выполнен в виде подвижной и неподвижной колодок, размещенных в корпусе механизма сцепления, охватывающих приводной вал и выполненных с элементами взаимной фиксации, при этом корпус механизма сцепления снабжен фиксатором, выполненным в виде двух шариков, связанных пружиной и установленных с возможностью взаимодействия с копирной поверхностью корпуса и с клиновой поверхностью дополнительно введенной шайбы, жестко связанной с подвижной колодкой, выполненной из эластичного материала, при этом первое звено и приводные шкивы последующих 3Ese- г ньев размещены на общем приводном валу и жестко связаны каждый с корпусом соответствующего механизма сцепления.
ФигЛ
Фиг. 2
15
Фuг.
б-б
Фиг. 5
В-8
77
.6
Фиг.7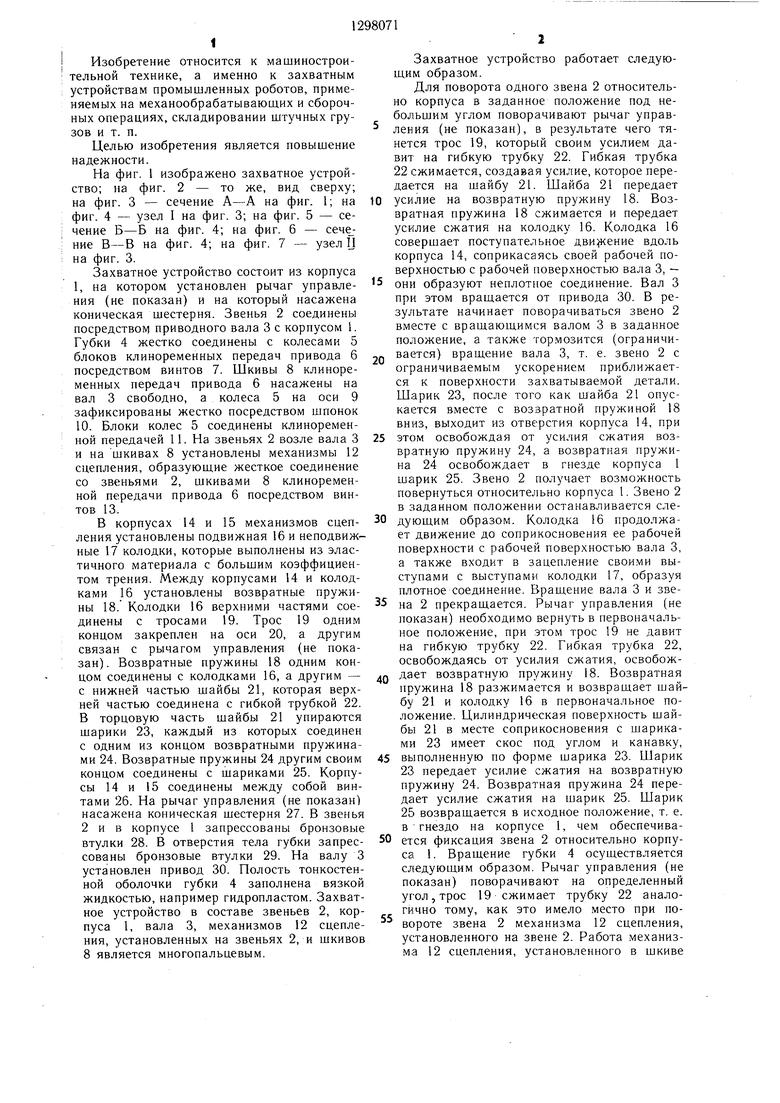
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ СРЕДСТВО, ПРИВОДИМОЕ В ДЕЙСТВИЕ МУСКУЛЬНОЙ СИЛОЙ ЧЕЛОВЕКА | 1991 |
|
RU2017647C1 |
| ИНВАЛИДНАЯ КОЛЯСКА С ЭЛЕКТРОМЕХАНИЧЕСКИМ ПРИВОДОМ | 1991 |
|
RU2085166C1 |
| Возвратно-поступательный ножной привод для велосипеда | 2022 |
|
RU2780873C1 |
| ФРИКЦИОННАЯ ПЕРЕДАЧА | 1991 |
|
RU2011069C1 |
| Клиноременный вариатор | 1989 |
|
SU1739143A1 |
| МЕДИЦИНСКИЙ МАНИПУЛЯТОР | 2008 |
|
RU2445933C2 |
| Веломобиль | 1987 |
|
SU1512848A1 |
| Устройство для гибки зигзагообразных нагревателей | 1987 |
|
SU1540897A1 |
| СОЕДИНЕНИЕ ДЛЯ КОМПЕНСАЦИИ ОТПУСКАНИЯ ПНЕВМАТИЧЕСКОГО ТОРМОЗА ДЛЯ РЕЛЬСОВЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2014 |
|
RU2661250C2 |
| ВСЕСОЮЗНА Pi г «rrJifUO ТГ"-??!!.?!'"'";'JC | 1973 |
|
SU369981A1 |
Изобретение относится к машиностроению, а именно к захватным устройствам промышленных роботов. Целью изобретения является повышение надежности. При повороте звена 2 относительно корпуса 1 перемешается трос 19, передавая усилие на трубку 22, которая перемеш,ает шайбу 21, которая вызывает перемеш,ение колодки 16, которая, соприкасаясь с валом 3, который вра- шается от привода, поворачивает звено 2. Шарик, после того как шайба 21 опускается вместе с пружиной 18, выходит из отверстия корпуса 14, освобождая от усилия возвратную пружину, которая освобождает в гнезде корпуса 1 шарик, звено 2 получает возможность повернуться относительно корпуса 1. После остановки вала 3 трос 19 освобождает шайбу 21, которая своим скосом воздействует на шарик, который через пружину передает усилие на шарик, который заходит в гнездо корпуса 1, фиксируя звено 2 относительно корпуса 1. Данная конструкция обеспечивает надежный захват изделия. 7 ил. 22 /4 JX. хл : А-А (Л 12 ю со 00 30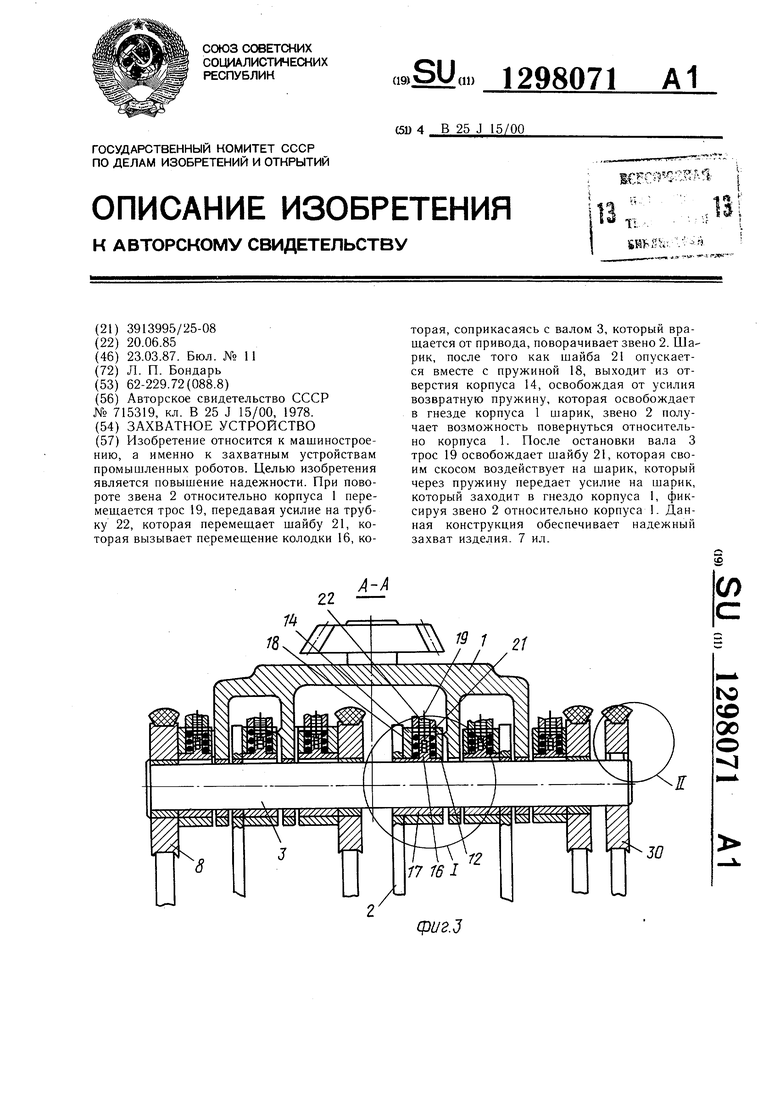
| Схват манипулятора | 1978 |
|
SU715319A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
