(54) ОХВАТ МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1979 |
|
SU772846A1 |
| Манипулятор | 1979 |
|
SU772839A1 |
| Цанговый патрон | 1991 |
|
SU1814997A1 |
| Исполнительный орган манипулятора | 1985 |
|
SU1268398A1 |
| Манипулятор модульного типа | 1988 |
|
SU1558663A1 |
| Схват манипулятора | 1980 |
|
SU994252A1 |
| АВТОМАТ ДЛЯ ПОДРЕЗАНИЯ ТОРЦА ЦИЛИНДРИЧЕСКИХ ДЕТАЛЕЙ ТИПА ТОНКОСТЕННЫХ СТАКАНОВ -. | 1970 |
|
SU275643A1 |
| Пружинно-пневматическое зажимное устройство | 1981 |
|
SU1028462A1 |
| Манипулятор | 1979 |
|
SU770780A1 |
| Роторный станок | 1990 |
|
SU1805007A1 |
1
Изобретение относится к машшюстроению и может быть исполь;ж)В9Но в робототезшических устройствах.
Известен схват манипулятора, содержащий основание, шарнирно соедийенные с ним пальцы, каждый из которых -имеет шарнирно соединенные между собой звенья и привод перемещения звеньев
Известное устройство имеет недостаточную область манипулирования за счет ограничения пер©«{ещений звеньев, кроме того, конструкция устройства сложна.
Цель изобретения - расширение функшюнальных возможностей и упрощение конструкции.
Это достигается благодаря тому, что предлагаемый схват манипулятора снабжен встроенными в щарниры, связываюшие звенья, цанговыми зажимами, а привод установлен на основании и связан со звеньями цепной передачей, звездочки которой установлены в цанговых зажимах с возможностью регулируемого проскаль вания.
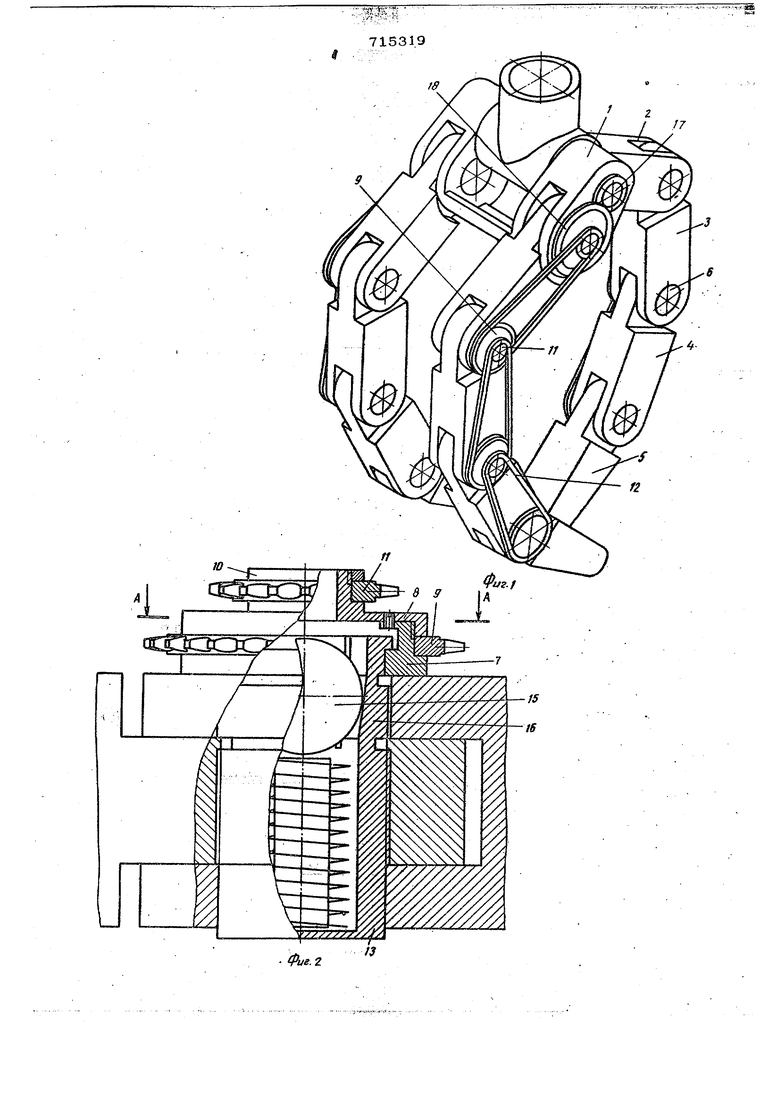
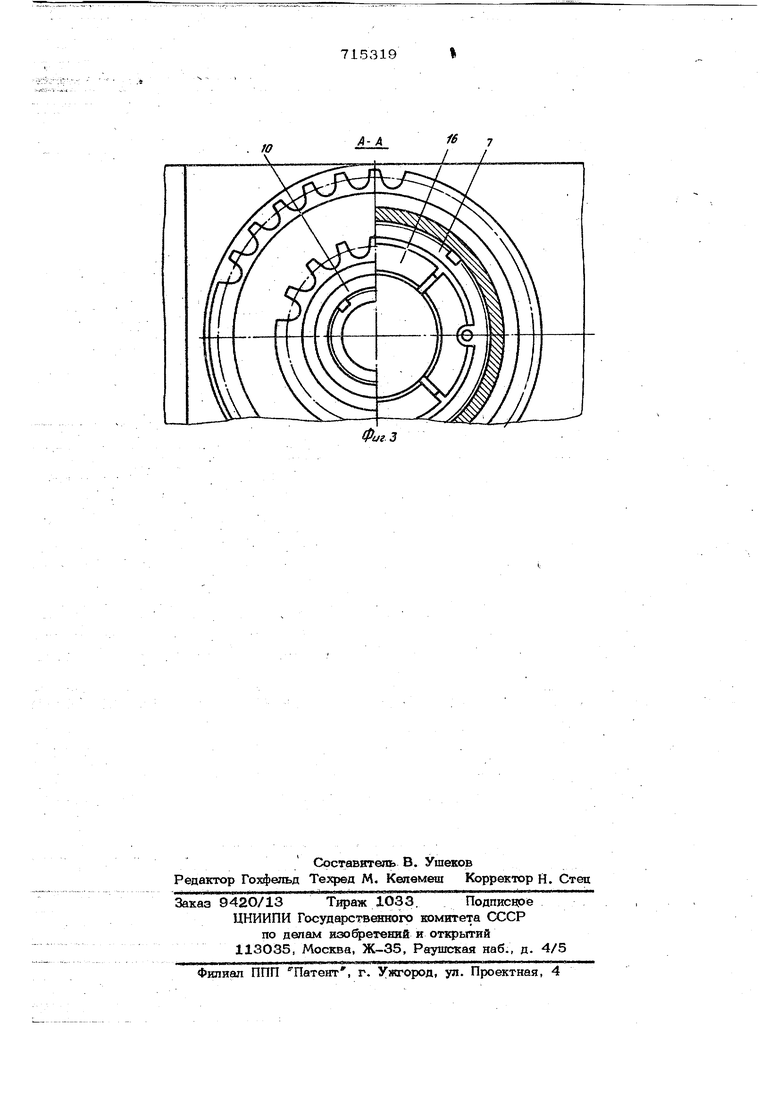
На фиг. 1 изображен предлагаемый схват, общий ВИД} на фиг. 2 - цанговый заншм, продопьтштй разрез; на фиг. 3 сечение А-А фиг, 2.
Схват манипулятора содержит основание 1, к которому шарнирно крепятся три (количество может быть пюбым) пальца. Каждый из пальцев i состоит из.звеньев 2-5. Звенья соединены шар1шрами, в ко торых расположень цанговые зажимы 6, приводящиеся в действие электромагнита ми. Цанга смонтирована таким офазом, что хсаждое носледукядее звено крепится к ней жестко, например звежо 3, каждое предыдущее звено, например звено.2, может свободз:о вращаться вокруг оси незатянутого цангового зажима, что обеспечивается небольшим зазором. На рабочей поверхности цанги находятся втулка 7, к которой жестко крепится посредством ступенчатой втулки 8 большая звездочка 9, а на самой втулке 8 жестко крепится кольцом 10 маленькая звездоч- ка 11. Этот блок втулок со звездочками
715319
мойсёт вращаться нанезатянутбй цанге. %енья пршэодятся в действие через звеэдочки цепями 12.
Цанговый зажим 6 содержит корпус 13, в котором находится электромагнит 14 и рабочее тело 15. Последнее может бтягйваться и разжимать цанговые лепестки 16.
Привод пе|)ёмет1ешш звеньев уставовлен на основания и через приводную шестерню 17 и ведомую шестерню 18 приводит в действие цепную передачу.. i
Схват работает следукядим офазом.
Перед захватом электромагниты приводятся в действие. Лепестки 1в пангв разж(гмаются и фиксируют втулку 7, с которой жестко свйдшъ звездочки И и 11. На этом этапе выб1фается такай ввгси на натяга цанги, которая создала бы в шфшфах момент сопротивления, йе 1101звряшаа1ий звшьям провисать и относитепьйо друга под дейстBEtesht собственных сил тяжести или СЕШ инерции. Шл&в начинает вращаться щзивйднв1я Ш1естфия 17, передйкхиая ёращ нйё от йрйШда, устано&лешюго на осна ванив. Эта шестерня приводит во враше isHe ведомую шестерню 18 н звёздочку 11 звеньев 2 каждого пальпа, и далее Ю цегцсм 12 - все остальные звевья.
ifo ейвеш, которое уже коснулось схватьшаемого объекта, прекрашает движение, но так как натяг цангового зажима невелик, блок втулок 7 и 8 со звездочками
Эй 11, принадлежащих цанге этого звена, проворачивается и через цепную передачу обеспечивает движение других звеньев до поверхности объекта. Таким образом звенья ПЛОТ1Ю облегают схватываемый объект. Затв электромагниты 14 включают с максимальной силой, что обеспечивает максимальный разжим цанговых :лепестков 16, которые надежно фиксируют все звенья друГ относительно друга. Далее осуществляется транспортировка объекта.
15 Формула изобр
е т е н и я
Схват машшул$ггора, содержащий основание, шаршфно соединенные с ним пальцы, каждый из которых имеет шарнирно соеяиненные между собой звенья и привод перемеЬ1@акя звеньев, отличающийся f&A, что, с целью расширения функцдональных возможностей и упрощения конструкции, он снабжен встроенными в шарниры, связывающие звенья, цанговыми зажимами, а привод установлен на основ.ании и связан со звеньями пепной передачей, звездочки которой установлены в цанговых зажимах с возможностью регулируемого проскальзывания.
Источники информации, принятые во внимание при экспертизе
ФигЗ
