Изобретение относится к обработке металлов давлением, в частности к устройствам для гибки зигзагообразных изделий.
Целью изобретения является повышение качества и надежности.
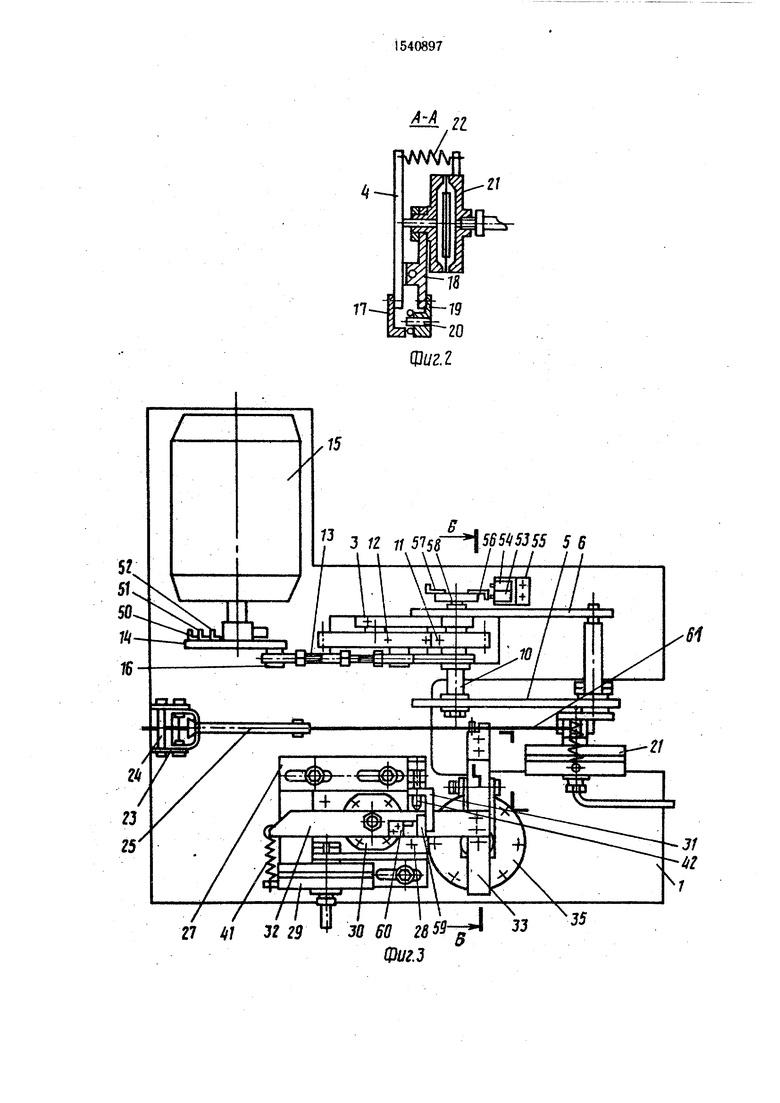
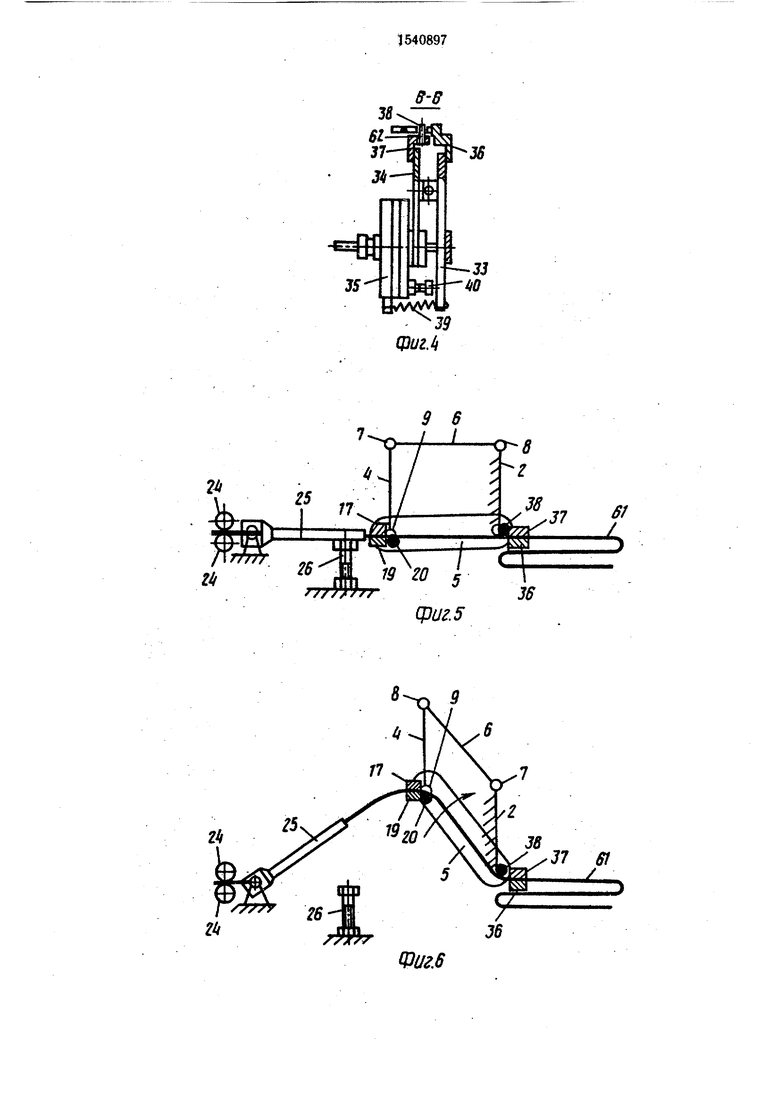
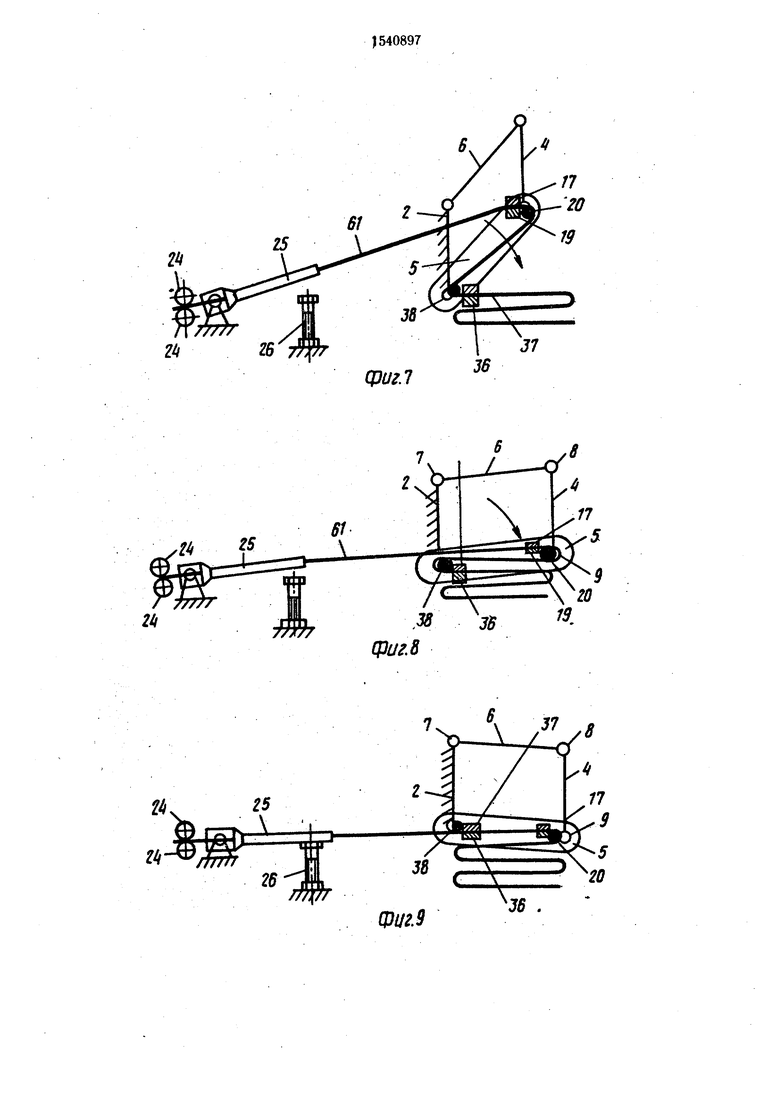
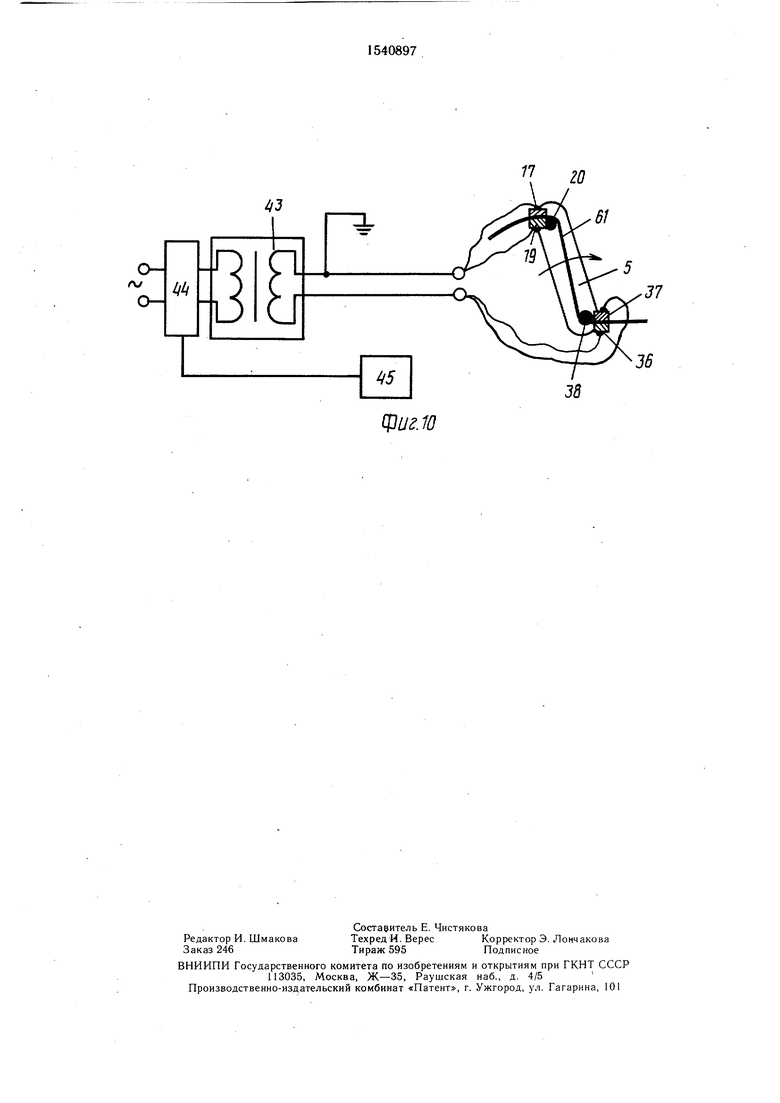
На фиг. 1 изображено предлагаемое устройство, разрез; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - устройство, вид сверху; на фиг. 4 - разрез Б--Б на фиг. 3; на фиг. 5-9 - схемы различных стадий процесса гибки; на фиг. 10 - структурная электрическая схема устройства.
Устройство для гибки зигзагообразных нагревателей смонтировано на плите 1. Вертикальное неподвижное звено параллелограмма образовано стойкой 2, закрепленной
на корпусе зубчатой передачи 3. Вертикальное подвижное звено образовано планкой 4. Другие звенья параллелограмма образованы серьгой 5 и планкой 6. Звенья параллелограмма соединены с.помощью шарниров 7, 8 и 9. Серьга закреплена на валу 10 шестерни 11, сцепленной с зубчатым колесом 12. Последнее шарнирно соединено с шатуном 13, в свою очередь шарнирно соединенным с диском 14, закрепленным на валу электродвигателя 15. Шатун 13 выполнен регулируемым по длине и шарнирно соединен с диском 14 посредством эксцентрика 16.
На планке 4 закреплена сменная зажимная губка 17 и шарнирно прикреплен рыСП
4
О
оо со j
чаг 18 с зажимной губкой 19, снабженной гибочным штырем 20 на одном конце и пнев- мокамерой 21 на другом.
Все эти детали, установленные на планке 4, образуют зажим. Пружина 22 раскрывает зажим, разводя губки 17 и 19.
На плите 1 установлена также стойка 23 с валиком 24, несущая на шарнире направляющую трубку 25 с возможностью поворота в вертикальной плоскости. Регулитрубка 25 опирается на упор 26. Конец проволоки 61 вводят через направляющую трубку 25 в зазор между раскрытыми губками 17, 19 и 36, 37. Затем включают пнев- мокамеры 21 и 35, которые, нажимая своими 5 штоками одна - на планку 4, а другая - на планку 33, производят зажим проволоки 61 губками 17, 19 и 36; 37. После этого включают автоматический режим. Электродвигатель 15 вращает диск 14, который черуемый упор 26 ограничивает поворот вниз Ю рез шатун 13 осуществляет поворот зубчанаправляющей трубки 25.
Кроме того, на плите 1 закреплено с возможностью подкладки основание 27 из электроизоляционного материала, несущее кронштейн 28, к которому прикреплены пнев- мокамера 29, стойка 30 и кронштейн 31. В стойке 30 смонтирован с возможностью поворота рычаг 32, на конце которого закреплена планка 33, шарнирно соединенная с рычагом 34 с пневмокамерой 35 на кон15
того колеса 12, а последнее сообщает возвратное качательное движение шестерне 11. Угол поворота шестерни составляет приблизительно 192° и регулируется поворотом эксцентрика 16 шарнира шатуна. Вместе с шестерней 11 совершает поворот и серьга 5. Ее крайнее положение устанавливается изменением длины шатуна 13, который выполнен составным, причем его средняя часть соединяется с крайними с поце. На свободном конце планки 33 при- 20 мощью резьб с различными шагами, креплена губка 36, а на конце рычага 34 -При повороте серьги 5 в направлении
по часовой стрелке направляющая трубка 25 поворачивается, предотвращая недопустимый изгиб проволоки в зоне, где не производится гибка. Во время вращения
губка 37 с гибочным штырем 38. Группа деталей, установленных на рычаге 32, образует зажим, который раскрывается пружиной 39, а величина раскрытия ограничивается упором 40. Подвод зажима рычагом 25 серьги 5 губки 17 и 19, связанные с планкой 4, сохраняют постоянную ориентацию вместе с ней. При этом гибочный штырь 20 находится ниже проволоки 61, а гибочный штырь 38 - выше проволоки.
Расположение гибочного штыря 20 относительно оси вала 10 и гибочного штыря 38 относительно оси шарнира 9 может регулироваться. Если оси гибочных штырей совпадают с осями вала и шарнира, то проволока почти не нагружается растягиваю32 производится пружиной 41 д о регулируемого упора 42 в кронштейне 21.
Подача импульсов тока осуществляется от понижающего силового трансформатора 43, включаемого тиристорным блоком 44, 30 к которому присоединен блок 45 управления. Вторичная обмотка трансформатора 43 подключена к губкам 17 и 19 (заземленная шина) и к губкам 36 и 37.
Система управления Циклом устройства осуществляется релейной схемой с электро- 35 шими усилиями. Если ось гибочного шты- пневмозолотниками (не показаны). В систе-ря 20 смещена влево относительно оси вала 10, то при гибке проволока испытывает и растяжение. Наконец, если ось гибочного штыря 20 смещена вправо от оси вала 10, то проволока полностью разгруже- 40 на от растягивающих усилий. Для положения оси штыря 38 справедливы те же соображения, но направления смещения обратные. Рекомендуется устанавливать небольшие смещения штырей порядка 0,2-
шестерни 11, и закрепленный на кронштей- 45 04 мм исключающие воздействие растяги- не 31 микропереключатель 59, на который вающих усилий на проволоку, воздействует передвижной упор 60, установ-В процессе гибки упор 50 воздействует на микропереключатель 48, который запускает блок 45 управления, а последний включает трансформатор 43, подающий элект- ных замыканий нерабочая наружная поверх- 50 рические импульсы на изгибаемый участок ность губки 37 покрыта изоляционным ма-проволоки 61 между зажимами. Импульсы
подаются в момент, когда исчерпывается запас пластичности материала проволоки, и прекращаются по истечении заданного времени. Импульсы тока повышают пластич- включают электродвигатель 15 до момента 55 ность проволоки благодаря действиям эф- поворота серьги 5 в крайнее левое (как изоб-фектов электропластичности.
В момент окончания гибки yijop 51 воздействует на микропереключатель 47, который выключает пневмокамеру 35, благодаму управления входят три микропереключателя 46-48, установленных на стойке 49, закрепленной на плите 1, на которые воздействуют передвижные упоры 50-52, установленные на диске 14, два микропереключателя 53 и 54, закрепленные на стойке 55 плиты 1, на которые воздействуют передвижные упоры 56 и 57, установленные на диске 58, закрепленном на валу 10
ленный на рычаге 32.
В устройстве осуществляется гибка проволоки 61. Для исключения нежелательтериалом 62.
Устройство работает следующим образом.
Первоначальную заправку проволоки производят в режиме наладки. Для этого
ражено на чертежах) положение. Затем выключают пневмокамеры 21 и 35 и губки 17, 19, 36 и 37 разжимаются. Направляющая
трубка 25 опирается на упор 26. Конец проволоки 61 вводят через направляющую трубку 25 в зазор между раскрытыми губками 17, 19 и 36, 37. Затем включают пнев- мокамеры 21 и 35, которые, нажимая своими штоками одна - на планку 4, а другая - на планку 33, производят зажим проволоки 61 губками 17, 19 и 36; 37. После этого включают автоматический режим. Электродвигатель 15 вращает диск 14, который через шатун 13 осуществляет поворот зубчарез шатун 13 осуществляет поворот зубча
того колеса 12, а последнее сообщает возвратное качательное движение шестерне 11. Угол поворота шестерни составляет приблизительно 192° и регулируется поворотом эксцентрика 16 шарнира шатуна. Вместе с шестерней 11 совершает поворот и серьга 5. Ее крайнее положение устанавливается изменением длины шатуна 13, который выполнен составным, причем его средкой 4, сохраняют постоянную ориентацию вместе с ней. При этом гибочный штырь 20 находится ниже проволоки 61, а гибочный штырь 38 - выше проволоки.
Расположение гибочного штыря 20 относительно оси вала 10 и гибочного штыря 38 относительно оси шарнира 9 может регулироваться. Если оси гибочных штырей совпадают с осями вала и шарнира, то проволока почти не нагружается растягиваюшими усилиями. Если ось гибочного шты- ря 20 смещена влево относительно оси варя чему пружина 39 разжимает губки 36 и 37, освобождая проволоку 61. Затем упор 52 воздействует на микропереключатель 46, включающий пневмокамеру 29, а последняя своим штоком поворачивает рычаг 32 и 5 отводит зажимные губки 36 и 37 от проволоки 61. Серьга 5, продолжая поворачиваться, опускает проволоку 61 сжатыми губками 17 и 19. В мертвой точке упор 52 освобождает микропереключатель 46, который
фектов электропластичности и термопластичности при полной разгрузке изгибаемою материала от дополнительных растягивающих усилий
Формула изобретения
1. Устройство для гибки зигзагообразных нагревателей, содержг.щее установленвыключает пневмокамеру 29, а пружина 41 10 ные на плите механизм привода, кинема- поворачивает рычаг 32 до упора 42, подводя тически связанный с механизмом захвата и губки 36 и 37 так, что они возвращаются механизмом подачи и гибки с гибочными обратно и охватывают новый участок про- оправками, отличающееся тем, что, с целью волоки 61. Одновременно упор 56 воздейст- повышения качества и надежности, оно вует на микропереключатель 53, который 15 снабжено смонтированной на плите стой- подготавливает выключение пневмокамеры . кой и размещенным на ней электричес- 21. Ее выключение сблокировано с включением пневмокамеры 35, и, благодаря этому, после зажима губками 36 и 37 проволоки 61 и выключения пневмокамеры 35 пружина 22 разводит губки 17 и 19.
При дальнейшем вращении диска 14 на
ки изолированным рычагом и источником импульсного тока, а механизм подачи и гибки выполнен в виде рамы с шар- нирно соединенными в форме параллело- 20 грамма звеньями, одно из которых установлено неподвижно, а другое - с возможвалу электродвигателя 15 серьга 5 поворачи-ностью возвратно-поступательного криволивается в обратном направлении (против ча-нейного перемещения, механизм захвата высовой стрелки). В другой мертвой точке,полней в виде двух зажимов, один из кокогда губки 17 и 19 охватят проволоку 6125 ТОРЫХ установлен на упомянутом рычаге
на новом участке, упор 57, воздействуя нас возможностью горизонтального перемещемикропереключатель 54, включает пневмока-ния и выполнен в виде двух губок, одна
меру 21, которая сжимает губки 17 и 19,из которых неподвижна, а другая вертиосуществляя зажим проволоки 61 на новомкально подвижна, другой зажим закреплен
участке.в нижней части подвижного вертикального
Далее следующий цикл гибки повтори-30 звена и выполнен в виде двух губок, одна
ется автоматически.из которых неподвижна, а другая устаТехнико-экономический эффект предло-новлена с возможностью горизонтального
женного устройства по сравнению с извест-перемещения, при этом гибочные оправки усным заключается в том, что повышаетсятановлены на подвижных губках обоих закачество нагревателей за счет исключенияжимов, которые подсоединены к источнику
микротрещин и других дефектов в местах35 импульсного тока.
изгиба проволоки. При этом представляется возможным изготавливать нагреватели из самых различных материалов, в том числе и малопластичных, так как процесс гибки происходит в условиях использования эф2. Устройство по п. I,-отличающееся тем, что оно снабжено смонтированной на плите стойкой и шарнирно установленной на ней направляющей в виде трубки с ограничителем ее поворота.
фектов электропластичности и термопластичности при полной разгрузке изгибаемою материала от дополнительных растягивающих усилий
Формула изобретения
ные на плите механизм привода, кинема- тически связанный с механизмом захвата и механизмом подачи и гибки с гибочными оправками, отличающееся тем, что, с целью повышения качества и надежности, оно снабжено смонтированной на плите стой- кой и размещенным на ней электричес-
ки изолированным рычагом и источником импульсного тока, а механизм подачи и гибки выполнен в виде рамы с шар- нирно соединенными в форме параллело- грамма звеньями, одно из которых установлено неподвижно, а другое - с возможимпульсного тока.
2. Устройство по п. I,-отличающееся тем, что оно снабжено смонтированной на плите стойкой и шарнирно установленной на ней направляющей в виде трубки с ограничителем ее поворота.

| название | год | авторы | номер документа |
|---|---|---|---|
| Цепевязальный автомат | 1990 |
|
SU1776198A3 |
| Автомат для гибки изделий из проволоки | 1989 |
|
SU1641490A1 |
| Цепевязальный автомат с кантователем вертикального исполнения | 1986 |
|
SU1383571A1 |
| Автомат для изготовления изделий из проволоки | 1977 |
|
SU737080A1 |
| Цепевязальный автомат | 1984 |
|
SU1249772A1 |
| Автомат для изготовления деталей из проволоки | 1985 |
|
SU1392733A1 |
| Устройство для подготовки радиоэлементов с осевыми выводами к монтажу | 1986 |
|
SU1370805A2 |
| Станок для заплетки канатов | 1976 |
|
SU614144A1 |
| Автомат для подготовки проводов к монтажу | 1987 |
|
SU1457041A1 |
| КОНВЕЙЕР ДЛЯ ОБЖИМА И ШТРИХОВКИ КНИГ | 1949 |
|
SU92284A1 |
Изобретение относится к обработке металлов давлением, в частности к гибочным устройствам. Цель изобретения - повышение качества и надежности изделий. Устройство содержит механизм подачи и гибки, выполненный в виде рамы с шарнирно соединенными звеньями в форме параллелограмма. Вертикальная пара звеньев этого параллелограмма имеет одно неподвижное звено и одно звено, установленное с возможностью возвратно-поступательного криволинейного движения. Механизм захвата выполнен в виде двух зажимов, один из которых закреплен в нижней части подвижного вертикального звена и включает неподвижную губку с гибочной оправкой-штырем, а другой установлен на электрически изолированном рычаге с возможностью горизонтального перемещения и включает неподвижную губку и вертикально перемещаемую силовым механизмом губку с гибочной оправкой. Оба зажима подключены к источнику тока. В процессе гибки включается трансформатор, подающий электрические импульсы на изгибаемый участок проволоки между зажимами. Импульсы подаются в момент, когда исчерпывается запас пластичности материала проволоки, и прекращаются по истечении заданного времени. 1 з.п. ф-лы, 10 ил.
14
15
/ // / /
чВ ч ft tig 26
3 38 36 37
сриг.1 А
95 SSUM9S - PLS 21 С fj
4
2 2П&
Z680frSt
$2
/
/
/
V
ы
Qc
фигЛ
я:
хл
19
фиг. 8
J5 .
43
ОН
ЛУ
он
1А
45
36
фиг. 10
| Устройство для изготовления зигзаго-ОбРАзНыХ дЕТАлЕй | 1978 |
|
SU829259A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
