строению, а именно к средствам и методам контроля зубчатых передач.
Цель изобретения - раса1ирение технологических возможностей путем обеспечения контроля многопоточных передач за счет суммирования синфазных сигналов с датчиков входных звеньев.
На чертеже представлена блок-схема устройства, реализующего способ.
Устройство включает в себя датчики 1 и 2 начальных звеньев 3 и 4 передачи 5, датчик 6 конечного звена 5 передачи, два фазовращателя 7 и 8, соединенные с выходами датчиков 1 и 2 начальных звеньев 3 и 4, сумматор 9, первый и второй входы которого соединены соответственно с выходами первого и второго фазовращателей 7 и 8, делитель 10, вход которого подключен к выходу сумматора 9, фазометр 11, первый вход которого подключен к выходу делителя, второй вход - к выходу датчика 6 конечного звена передачи 5,, и регистратор 12, связанньш с выходом фазометра 11 ,
Способ осуществляется следующим образом.
Устанавливают датчики 1 и 2 начальных звеньев 3 и 4 и датчик 6 конечного звена 5 передачи, произво- дят обкатку колес передачи 5, ре
Способ контроля кинематической погрешности передач, заключающейся в том, .что устанавливают датчики на- 5 чального и конечного звеньев передачи, производят обкатку колес передачи, регистрируют последовательность сигналов на вькоде датчиков начального и конечного звеньев и используют их для определения кинематической погрешности передачи, о т- ли чающийся тем, что, с целью расширения технологических возможностей путем обеспечения контрогистрируют последовательность сигналов на выходах датчиков 1 и 2 началь- 35 ля многопоточных передач, при регист ных звеньев 3 и 4 передачи 5 и на рации суммгфуют синфазные сигналы выходе датчика 6 конечного звена,Ко- датчиков начальных звеньев.
Составитель В.Афонский Редактор С.Патрушева Техред М.Ходанич Корректор И.Эрдейи
Заказ 875/40 Тираж 678 Подписное ВНИШИ Государственного комитета СССР
по делам изобретений и бткрытий 11-3035, Москва, , Раугаская наб., д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
выбирают равным количеству начальных звеньев многопоточной передачи,, Кроме того, перед регистрацией сигналы
с входных датчиков приводят к нулевой средней фазе относительно одного из них, затем суммируют в сумматоре 9, вырабатывающем сигнал со средней мгновенной фазой, согласовывают его
по частоте с сигналом датчика 6 конечного звена в делителе 10 частоты и сравнивают сигналы по фазе. При наличии комплексной кинематической погрешности многопоточной передачи
появляется переменньм сдвиг фазы сигналов, которых характеризует погрешность контролируемой передачи.
20 Формула изобретения
Способ контроля кинематической погрешности передач, заключающейся в том, .что устанавливают датчики на- 5 чального и конечного звеньев передачи, производят обкатку колес передачи, регистрируют последовательность сигналов на вькоде датчиков начального и конечного звеньев и используют их для определения кинематической погрешности передачи, о т- ли чающийся тем, что, с целью расширения технологических возможностей путем обеспечения контро30
35 ля многопоточных передач, при регист рации суммгфуют синфазные сигналы датчиков начальных звеньев.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля кинематической погрешности передач | 1982 |
|
SU1021936A1 |
| Устройство для контроля кинематическойпОгРЕшНОСТи МЕХАНизМОВ | 1979 |
|
SU823840A1 |
| Устройство для контроля кинематической погрешности зубчатых передач | 1981 |
|
SU1015245A1 |
| Устройство для контроля кинематической погрешности механизмов | 1980 |
|
SU962760A1 |
| Устройство для контроля кинематической погрешности зубчатых передач | 1983 |
|
SU1128109A1 |
| Устройство взаимного фазирования пространственно разнесенных усилительных каналов | 1988 |
|
SU1585896A1 |
| Устройство для аттестации мер фазового сдвига | 1985 |
|
SU1307387A1 |
| Устройство для контроля кинематической погрешности передач | 1982 |
|
SU1100494A1 |
| Устройство для контроля кинематической погрешности механизмов | 1978 |
|
SU706687A1 |
| Устройство для контроля кинематической погрешности механических передач | 1981 |
|
SU953450A1 |
Изобретение относится к машиностроению. Цель изобретения - расширение технологических возможностей путем обеспечения контроля многопоточных передач за счет суммирования синфазных сигналов с датчиков входных звеньев. Это достигается тем,что перед регистрацией сигналов с.датчиков 1 и 2 входных звеньев их устанавливают синфазно относительно одного из них, а количество датчиков 1 и 2 входных.звеньев выбирают по количеству последних. После согласования суммарного сигнала с датчиков 1 и 2 входных звеньев по частоте с сигналом датчика 6 выходного звена по изменению их фазы определяют кинематическую погрешность многопотЪч- ной передачи 5. 1 ил. в (Л /Г ю U Jf п 12 го со 00 ел ГчЭ ел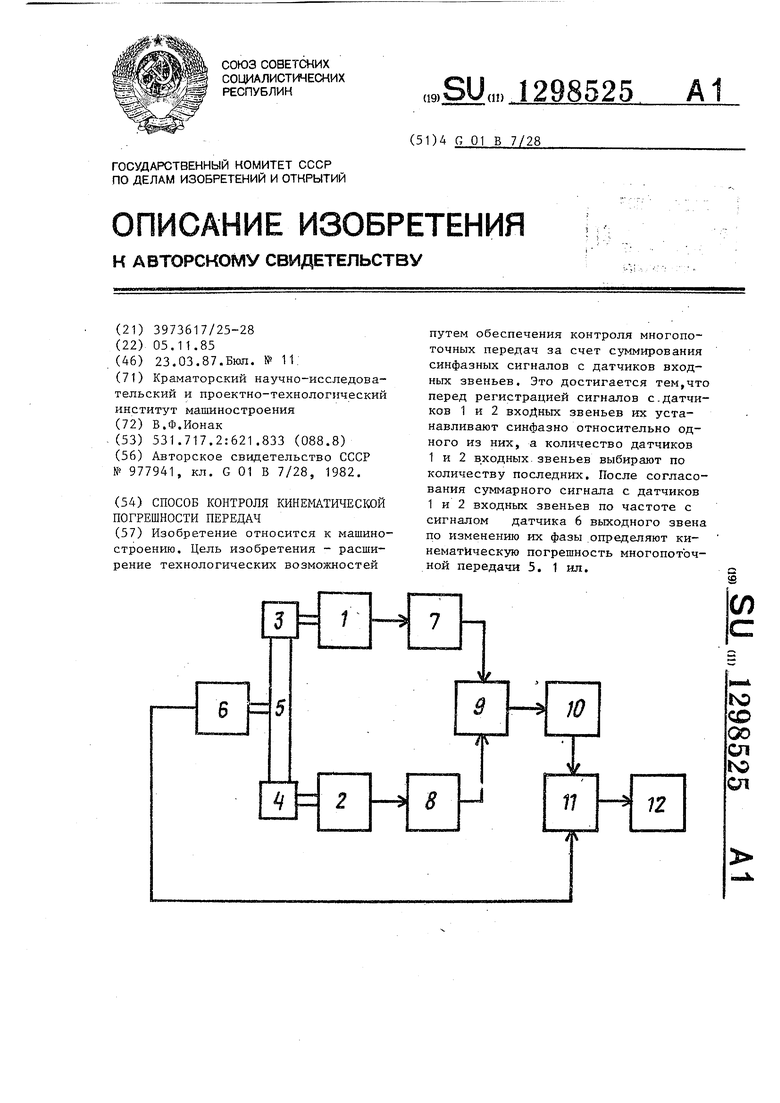
| Способ контроля кинематической погрешности передач | 1981 |
|
SU977941A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
