4
СО 4;:
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля кинемати-чЕСКОй пОгРЕшНОСТи пЕРЕдАч | 1975 |
|
SU819573A1 |
| ПРИБОР ДЛЯ КОНТРОЛЯ КИНЕМАТИЧЕСКОЙ ПОГРЕШНОСТИ ПЕРЕДАЧ | 1971 |
|
SU304425A1 |
| Устройство для контроля кинематической погрешности зубчатых передач | 1981 |
|
SU1015245A1 |
| Устройство для контроля кинематической погрешности механизмов | 1980 |
|
SU962760A1 |
| ПРИБОР ДЛЯ КОНТРОЛЯ КИНЕМАТИЧЕСКОЙПЕРЕДАЧ | 1967 |
|
SU198708A1 |
| Устройство для контроля кинематической погрешности механических передач | 1981 |
|
SU953450A1 |
| ПРИБОР ДЛЯ КОНТРОЛЯ КИНЕМАТИЧЕСКОЙ ПОГРЕШНОСТИ ЗУБЧАТЫХ ПЕРЕДАЧ | 1972 |
|
SU436225A1 |
| Устройство для контроля кинематическойпОгРЕшНОСТи МЕХАНизМОВ | 1979 |
|
SU823840A1 |
| Способ контроля кинематической погрешности передач | 1981 |
|
SU977941A1 |
| Способ измерения кинематической погрешности передач | 1981 |
|
SU998853A1 |
УСТРОЙСТВО ДЛЯ КОНТРОЛЯ КИНЕМАТИЧЕСКОЙ ПОГРЕШНОСТИ ПЕРЕДАЧ, содержащее.датчики начального и конечного звеньев контролируемой передачи, однополюсный модулятор, вход которого соединен с выходом датчика начального звена через делитель частоты, фазометр, первый вход которого соединен через второй делитель частоты с датчиком конечного звена, а второй вход с выходом однополосного модулятора, и регистрирующий прибор,-соединенньй с выходом фазометра, отличающееся тем, что, с целью повьшения точности контроля, оно снабжено третьим делителем частоты, вход кото рого соединен с выходом датчика начального звена, а выход - с вторым | входом одногтолосного модулятора. (Л
I
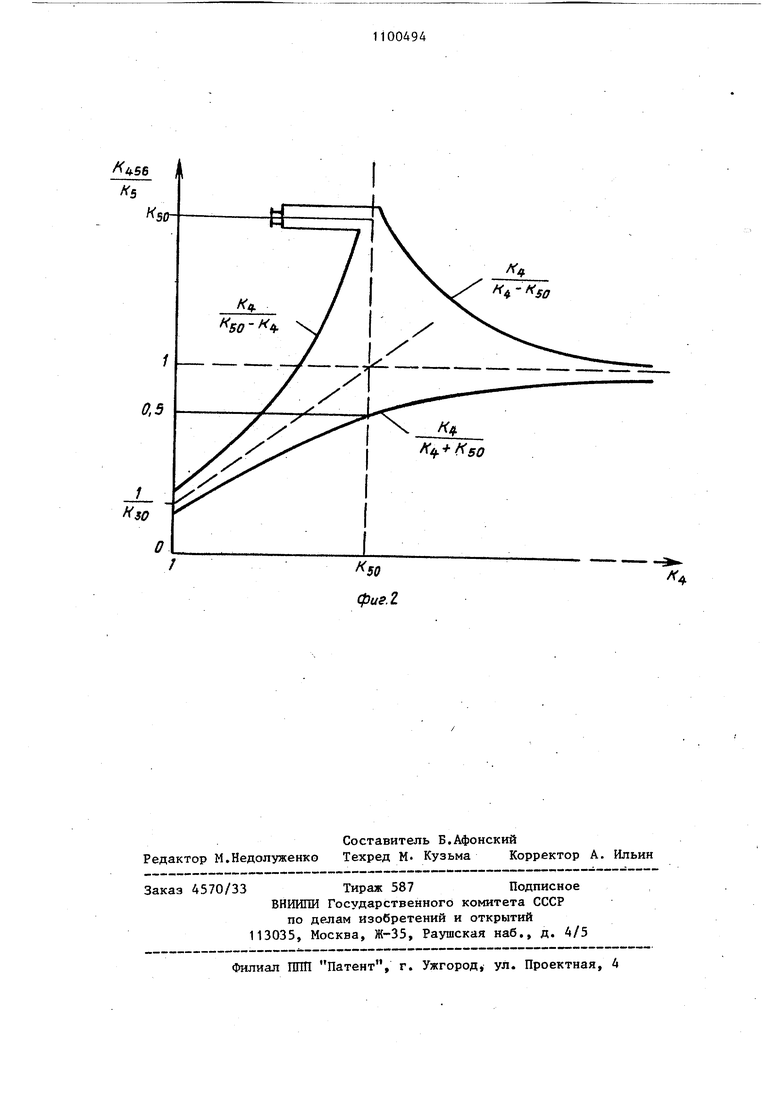
Изобретение относится к машиностр нию, .а именно к средствам контроля зубчатых передач. Известно устройство для контроля кинематической погрешности передач, содержащее датчики начального и коне ного звеньев передачи, многоразрядный делитель частоты, фазометр и регистрирующий прибор 13. Недостатком этого устройства явля ется значительная погрешность измере ния, порождаемая в делителе частоты. Наиболее близким к изобретению является устройство для контроля кин матической погрешности передач, содержащее датчики начального и конечного звеньев контролируемой передачи однополосньй модулятор, вход которот го соединен с выходом датчика началь ного звена через делитель частоты, фазометр, первый вход которого соеди нен через второй делитель частоты с датчиком конечного звена, а второй вход с выходом однополосного м дулятора, и регистрирующий прибор, Jсоединенный с выходом фазометра С2. Недостатком этого устройства является значительная погрешность от нестабильности привода, влияющая на точность результата контроля. Цель изобрет1Ения - повьш1ение точности контроля. Цепь достигается тем, что устройство для контроля кинематической погрешности передач, содержащее датчики начального и конечного звеньев контролируемой передачи, однополрсный модулятор, вход которого соединен с выходом датчика начального .зве на через делитель частоты,-фазометр, первый вход которого соединен через второй делитель частоты с датчи ком конечного звена, а второй вход с выходом однополосного модулятора, и регистрирующий прибор, соединенный с выходом фазометра, снабжено третьи делителем частоты, вход которого соединен с в 51ходом датчика начального звена, а выход - с вторым входом однополосного модулятора. На фиг. 1 изображена структурная схема устройства для контроля кинема тической погрешности передачи; на фиг. 2 - нормированный график измене ния общего коэффициента деления частоты. Устройство для контроля кинемати ческой погрешности передач включает в себя датчики 1 и 2 соответственно начального и конечного звеньев контролируемой передачи 3, однополосньгй модулятор 4, выход которого соединен с выходом датчика 1 начального звена через делитель 5 частоты, фазометр 6, первый вход которого соединен через второй делитель 7 частоты с датчиком 2 конечного звена, а второй вход - с выходом однополосного модулятора 4, и регистрирующий прибор 8, соединенный с выходом фазометра 6, а также третий делитель 9 частоты, вход которого соединен с выходом датчика 1 начального звена, а, выход с вторым входом однополосного модулятора 4. Устройство работает следующим образом. При движении контролируемой пере- дачи 3 датчики 1 и 2, установленные соответственно на начальном и конечном звеньях контролируемой передачи, генерируют электрические сигналы, представляющие собой напряжение переменного тока. Частоты сигналов пропорциональны частотам вращения начального и конечного звеньев передачи 3, а также числам штрихов, зубцов, магнитных меток или других физических носителей на шкалах датчиков 1 и Частота выходных сигналов датчика 1 начальногозвена понижается делителями частоты 5 и 9. Выходные сигналы делителей частоты поступают на входы однополосного модулятора 4, которьй вырабатывает сигнал суммарной или разностной частоты. Погрешность от нестабильности привода в предлагаемом устройстве компенсируется при любом передаточном отношении, и . Предположим, что контролируемая передача имеет U 9,1, а датчик тихоходного .звена имеет 1000 импульсов. Если нестабильность частоты вращения тихоходного звена составляет 10%, то при номинальной частоте, вращения тихоходного звена 1 об/с размах погрешности от нестабильности привода на тихоходном валу составит 1 «10 x1000 «60 36000 эл.град. Размах погрешности на быстроходном валу составит 9,1 х 36000 327600 эл. «327600 эл.град., т.е. в (J раз больше. Угол поворота быстроходного звена в и раз больше, чем тихоходного. После приведения частоты сигнала быстрохоЯного датчика к частоте сигнала тихохрдного датчика размах погрешности от нестабильности привода уменьшится в и раз и будет равен размаху погрешности в,канале датчика tttxoxoAHoro звена. Однако необходимость фильтрации сигнала на частоте кинематической погреш1аости в известном устройсЧве приводит к задержке во времени к }лебаний по каналам фаз о метра и появлению нескомпенсированной составляю1цей. Датчик 1 (фиг. 1) генерирует сигнал с частотой f . Делителями часто ты 5 и 9 частота преобразуется соответствеино в час.тоты п f в соответствии с их коэффициентами пре образования К и К, i 4 г5 .. Однополюсный модулятор 4 вьфабаты вает сигнал, частота которого равна сумме тщ разности частот вход ньрс сигналов: В результате частота - выходного сигнала датчика 1 прёрбразуется в частоту выходного сигнала однополюс-ного модулятора 4 по закону: Г.2.12.л . Ч К, 2 -. Следовательно, общий коэффициент деления частоты цепью, состоящей из делителей частоты 5 и 9 однополосного модулятора 4 составляет: ,. , : . ч v-v где К и К - коэффициенты деления делителей .частоты 5 и 9 соответственно. Очевидно, что общий коэффициент деления К, нормированньй относительно Kj для одного из целочисленных дискретных начений Кр tnt может принимать любое значение, выражающеёся отношением целых чисел (фиг,2), Перед работой в устройство вводят значения коэффициентов деления К и Kj, определенных с помощью приведенного вьфажения. Сигналы равных частот с выходов однополосного модулятора 4 и датчика 2 конечного звена сравниваются в фазометре 6 Результат сравнения фиксируется peгиcfрирующим прибором 8. Использование изобретения позвЪлит обеспечить точное воспроизведение эталона передаточного отношения в устройстве для контроля кинематической погрешности передач, чем повысит точность контроля.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| АВТОМАТ ДЛЯ СМЕНЫ ШПУЛЬ НА ТКАЦКОМ СТАНКЕ | 1933 |
|
SU39692A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ПРИБОР ДЛЯ КОНТРОЛЯ КИНЕМАТИЧЕСКОЙ ПОГРЕШНОСТИ ПЕРЕДАЧ | 0 |
|
SU304425A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
