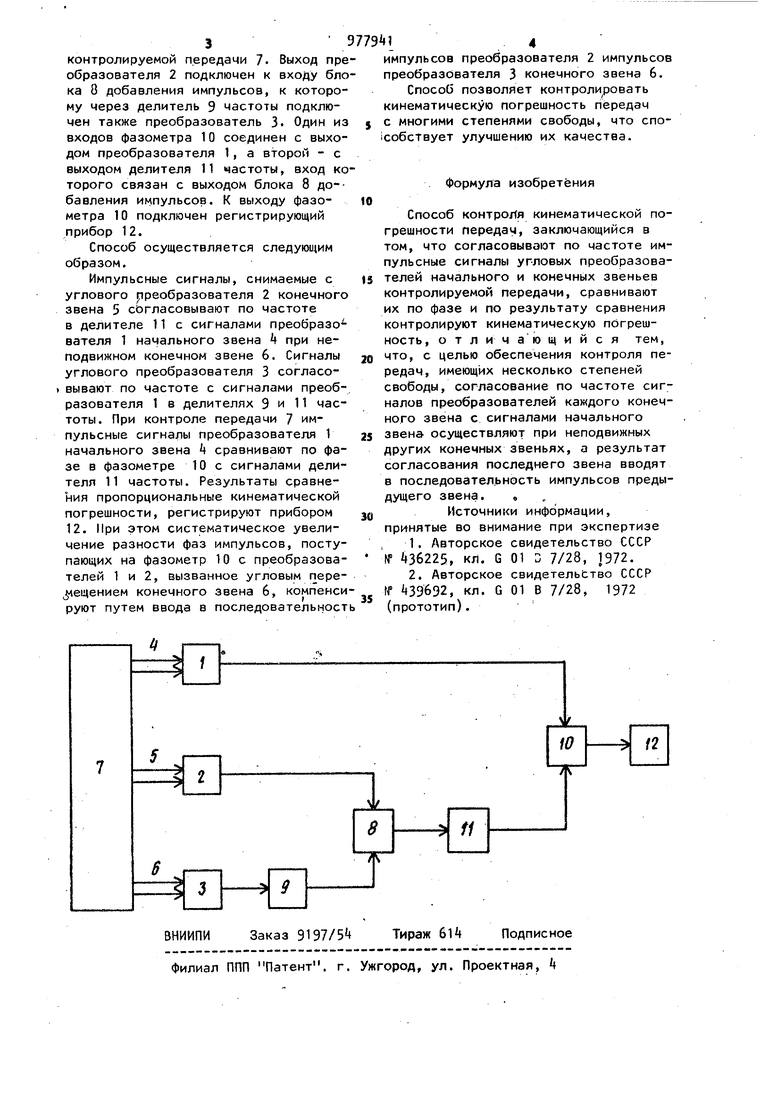
(5) СПОСОБ КОНТРОЛЯ КИНЕМАТИЧЕСКОЙ ПОГРЕШНОСТИ ПЕРЕДАЧ Изобретение относится к техническим измерениям в машиностроении, а. именно к способам контроля кинематической погрешности передач. Известен способ контроля кинематической погрешности передач, заключающийся в том, что с угловых преобразователей начального и конечного звеньев контролируемой передачи снимают импульсные сигналы, согласовывают их по частоте и по разности фаз между ними контролируют кинематическую погрешность С11, Наиболее близким к предлагаемому {является способ контроля кинематической погрешности передач, заклю.чающийся в том, что импульсные сигналы угловых преобразователей началь ного и конечных звеньев контролируемой передачи согласовывают по частоте, сравнивают их по фазе и по результату сравнения контролируют кинематическую погрешность С2. Недостатком известных способов является невозможность контроля кинематической погрешности передам, имеющих несколько степеней свободы. Цель изобретения - контроль кинематической погрешности передач с несколькими степенями свободы. Поставленная цель достигается тем, что согласование по частоте сигнала преобразователей каждого конечного звена осуществляют с сигналами начального звена при неподвижных других конечных звеньях, а результат согласования последнего звена вводят в последовательность импульсов предыдущего звена. На чертеже изображена блок-схема устройства, реализующего предлагаемый способ для передач с двумя степенями свободы. Устройство включает в себя угловые преобразователи 1-3, соответственно устанавливаемые на начальном звене k и конечных звеньях 5 и 6 контролируемой передачи 7. Выход пре образователя 2 подключен к входу бло ка О добавления импульсов, к которому через делитель 9 частоты подключен также преобразователь 3. Один из входов фазометра 10 соединен с выходом преобразователя 1, а второй - с выходом делителя 11 частоты, вход ко торого связан с выходом блока 8 до-бавления импульсов. К выходу фазометра 10 подключен регистрирующий прибор 12. Способ осуществляется следующим образом. Импульсные сигналы, снимаемые с углового рреобразователя 2 конечного звена 5 сЬгласовывают по частоте в делителе 11 с сигналами преобразо вателя 1 начального звена Ц при неподвижном конечном звене 6. Сигналы углового преобразователя 3 согласо) вывают по частоте с сигналами преобразователя 1 в делителях 9 и 11 частоты. При контроле передачи 7 импульсные сигналы преобразователя 1 начального звена А сравнивают по фазе в фазометре 10с сигналами делителя 11 частоты. Результаты сравнения пропорциональные кинематической погрешности, регистрируют прибором 12. При этом систематическое увеличение разности фаз импульсов, поступающих на фазометр 10 с преобразователей 1 и 2, вызванное угловым пере ещением конечного звена 6, компенси руют путем ввода в последовательност импульсов преобразователя 2 импульсов преобразователя 3 конечного звена 6. Способ позволяет контролировать кинематическую погрешность передач с многими степенями свободы, что спо1собствует улучшению их качества. Формула изобретения Способ контроля кинематической погрешности передач, заключающийся в том, что согласовывают по частоте импульсные сигналы угловых преобразователей начального и конечных звеньев контролируемой передачи, сравнивают их по фазе и по результату сравнения контролируют кинематическую погрешность, отличающийся тем, что, с целью обеспечения контроля передач, имеющих несколько степеней свободы, согласование по частоте сигналов преобразователей каждого конечного звена с сигналами начального звена осуществляют при неподвижных других конечных звеньях, а результат согласования последнего звена вводят в последовательность импульсов предыдущего звена. в Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № i(36225, КГ). G 01 D 7/28, 1972. 2.Авторское свидетельство СССР № 39692, кл. G 01 В 7/28, 1972 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля кинематической погрешности механических передач | 1981 |
|
SU953450A1 |
| Кинематомер | 1982 |
|
SU1097894A1 |
| Способ контроля кинематической погрешности передач | 1985 |
|
SU1298525A1 |
| Способ измерения кинематической погрешности зубчатых передач | 1979 |
|
SU783576A1 |
| Устройство для контроля кинематической погрешности механизмов | 1980 |
|
SU962760A1 |
| ПРИБОР ДЛЯ КОНТРОЛЯ КИНЕМАТИЧЕСКОЙ ПОГРЕШНОСТИ РЕДУКТОРОВ | 1972 |
|
SU420864A1 |
| Устройство для контроля кинематической погрешности передач | 1982 |
|
SU1100494A1 |
| Устройство для контроля кинематическойпОгРЕшНОСТи МЕХАНизМОВ | 1979 |
|
SU823840A1 |
| ПРИБОР ДЛЯ КОНТРОЛЯ КИНЕМАТИЧЕСКОЙПЕРЕДАЧ | 1967 |
|
SU198708A1 |
| СПОСОБ ИЗМЕРЕНИЯ КИНЕМАТИЧЕСКОЙ ПОГРЕШНОСТИ ПЕРЕДАЧ | 1972 |
|
SU325479A1 |
