выход третьего блока сравнения.к входу второго квадратора, выход первого зсшатчика соединен с.входом седьмого фильтра низкой частоты и через пятый фильтр низкой частоты с вторым входом пятого блока сравнения, выход первого датчика соединен с входом восьмого фильтра низкой частоты и через шестой фильтр низкой частоты - с вторым входом седьмого блока сравнения, выход источника постоянного сигнала подключен через шестой блок сравнения к второму входу первого блока умноиения, выход первого сумматора - к входу регистратора.

| название | год | авторы | номер документа |
|---|---|---|---|
| Регулирующее устройство | 1981 |
|
SU980069A1 |
| Адаптивная двухцелевая система управления | 1982 |
|
SU1100608A1 |
| Адаптивная система регулирования объекта с нестационарной характеристикой,например,дуговой сталеплавильной печи | 1983 |
|
SU1068891A1 |
| Система экстремального регулирования | 1981 |
|
SU1029140A1 |
| Адаптивная система регулирования многомерного объекта | 1981 |
|
SU1174901A1 |
| Регулятор | 1982 |
|
SU1037208A1 |
| Адаптивное регулирующее устройство | 1982 |
|
SU1064271A1 |
| Устройство для адаптивной идентификации объекта | 1983 |
|
SU1177794A1 |
| Управляемый сглаживающий фильтр | 1982 |
|
SU1061250A1 |
| Прогнозирующий регулятор с переменной структурой | 1981 |
|
SU980068A1 |
АДАПТИВНАЯ СИСТЕМА КОНТРОЛЯ И РЕГУЛИРОВАНИЯ, содержащая п ервый блок умножения, последовательно включенные первый задатчик, первый блок сравнен11я, первый фильтр низкой частоты, первый регулятор, второй блок умножения, первый сумматор и исполнительный орган, подключенный выходом к входу объекта управления, последовательно соединенные первый датчик и второй сумматор, выход которого соединен с вторым входом, первого блока сравнения, последовательно включенные второй датчик, второй блок сравнения и первую модель объекта, подключенную выходом к второму входу второго сумматора, последовательно включенные первый квадратор, второй фильтр низкой частоты, третий сумматор и блок деления, последовательно включенные четвертый сумматор, третий блок сравнения, третий фильтр низкой частоты, второй регулятор, четвертый блок сравнения и вторую модель объекта, выход которой соединен с первым ВХОДСИ4 четвёртого сумматора, последовательно включенные, второй квадратор и четвертый фильтр низкой Частоты, выход которого соединен с вторыми входами его сумматора и бЯока деления, выход исполнительного органа соединен через : второй датчик с вторым входе четвертого блока сравнения, второго регулятора соединен через первый блок ллножения с вторь входом первого сумматора, выход первого регулятора подключен к второму входу второго блока сравнения,выход первого датчика - к второму входу четвертого сумматора, выход первого i задатчика - к второму входу третьего блока сравнения, вход первого датчика соединен с выходом объекта управления, отличающаяся тал, что, с целью повышения точности регулирования и контроля, в нее введены регистратор, пятый и местой фильтры низкой частоты, первый масштабирукщий блок, второй задатчик, источник постоянного сигнала, последовательно включенные седьмой фильтр низкой частоты, пятый блок сравнения, первый блок определения модуля, второй масштабирующий блок, пятый сумматор, третий масптабирукщий блок, инвертор, шестой сумматор к шестой блок сравнения, последовательно включенные восьмой фильтр низкой частоты, седьмой йлок сравнения, второй блок определения иодуля и четвертый масштабирующий блок, выход которого соединен с ps вторым входом пятого сумматора, выход блока деления соединен через первый масштабирующий блок с вторым входом шестого сумматора, третий вход которого подключен к выходу второго задатчика, а выход - к второму входу второго блока умножения, выход первого блока сравнения подключен к входу первого квадратооа.
Изобретение относится к автоматическому упрайлению и регулированию, в частности к адаптивньм системам управления, и может быть использовано для построения систем контроля и регулирования объектов, подверженных влиянию нестационарных возмущений.
Известно устройство для контроля сигнала, динамически искаженного и закрытого измерительной помехой. Устройство для контроля сигнала содержит последовательно включенные измеритель, первый блок сравнения, пороговый элемент, второй блок сравнения, интегратор, выход которого соединен через первый блок задержки с вторьил входсж второго блока сравнения, масштабирукщий блок, сумматор, выход которого соединен со своим вторым входом, и модель измерителя, подклю- . ченную выходом к второму входу первого блока .«сравнения l.
Недостатком данного устройства является низкая точность контроля из-за того., что не учитывается изменякщаяся сложность измеряемого сигнала.
Наиболее близким к предлагаемому по технической сущности является регулирукщее устройство,содержащее первый модельный контур регулирования, включающий последовательно соединенные первый блок сравнения, первый фильтр низкой частоты, первый регулятор, второй блок сравнения, первую модель объекта и первый сумматор, выход которого подключен к первому входу первого блока сравнения, второй модельный контур регулирования, включающий последовательно соединенные третий блок сравнения, второй фильтр низкой частоты второй регулятор, четвертый блок сравнения, вторую модель объекта и второй сумматор, выход которого подключен к первому входу третьего блока сравнения, блок оценивания точности модельных контуров регулирования, включающий последовательно
соединенные пятый блок сравнения, первый квадратор и третий фильтр низкой частоты, последовательно соединенные шестой блок сравнения,; второй квадратор и четвертый фильтр низкой частоты, блок выработки натурного управляющего воздействия, включающий последовательно соединенные третий сумматор, первый блок деления, первый блок, умножения и четвертый сумматор, последователь- но соединенные второй блок деления и второй блок умножения, причем выходы первого и второго сумматоров подключены к первьм входам соответственно пятого и шестого блоков сравнения,вторые входы первого, третьего, пяторо и шестого блоков сравнения :связаны в один узел, второй вход первого сумматора соединен с вторьж входом второго сумматора, выход TpisTbero фильтра низкой частоты подключёнК первсялу входу третьего сумматораи второму входу первого блока деления, выход четвертого фильтра низкой частоты подключен к первому входу второго блока деления и через третий сумматор к второму входу второго блока деления, выход второго блока умножения соединен с вторым входом четвертого сумматора, выход которого подключен к вторым входам второго и четвертого блоков сравнения, выходы первого и второго регуляторов подключены к вторым входам соответственно второго и первого блоков умножения.
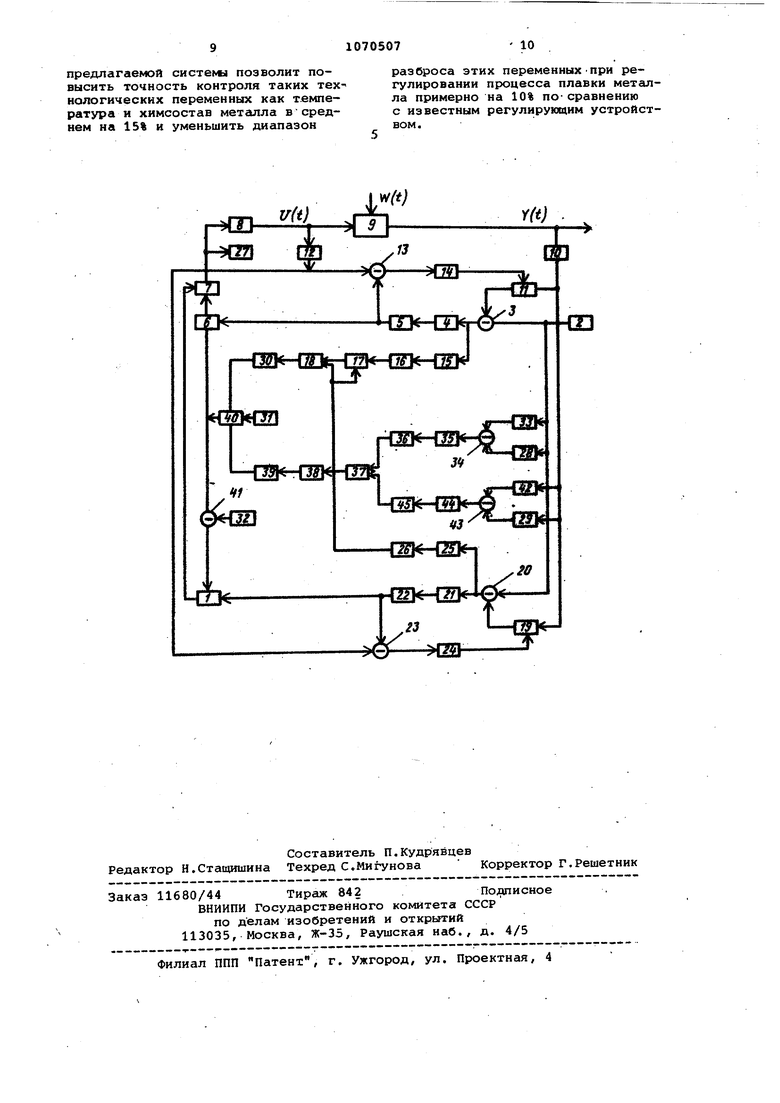
При работе регулирующего устройства первьы и вторым (более быстродействующим) регуляторами вырабатываются управляющие воздействия, по KOTopbovi с помощью блоков сравнения, моделей объекта и сумматоров рассчитываются модельные выходы первого и второго модельных контуров.В блоке оценивания точности модельных контурор рассчитываются текущие дисперсии ошибок регулирования каждого контура. В блоке выработки натурного управляющего воздействия 0 определяется взвешенная сумма первого и второго модельных управляющих воздействий. При этом весовые коэффициенты определяются в зависимости от текущих .дисперсий ошибок регулирования 23. Недостатки регулирующего устройства заключаются в низкой точности, регулирования, обусловленной запаздыванием в оценке точности регулиро вания модельных контуров, так как эта оценка рассчитывается на прошедших интервалах времени, а также в невысокой точности контроля, в ре зультате того, что регулирукщее устройство нельзя применять для измерительных, систем с жесткими требованиями по своевременности и достоверности получаемых данных. Цель изобретения - повьииение точ ности регулирования и контроля. Поставленная цель достигается там, что в регулирующее устройство, содержащее первый блок умножения, последовательно включенные первый задатчик, первый блок сравнения, первый фильтр низкой частоты, первый- регулятор, второй блок умножения , первый сумматсф и исполнительный орган, подключенный выходом к входу объекта управления, последова тельно соединенные первый датчик и второй сумматор, выход которого соединен с вторьал входом первого бл ка сравнения, последовательно включенные второй датчик, второй блок сравнения.и первую модель объекта, подключенную выходом к вторсячу входу второго сумматора, последователь но включенные первый квадратор, вто рой фильтр низкой частоты, третий сумматор и блок деления, последовательно включенные четвертый сумматор, третий блок сравнения, третий фильтр низкой частоты, второй регулятор, четвертый блок сравнения и вторую модель объекта, выход которой соединен с первым входом четвер того суммат&ра, последовательно вкл ченные второй квадратор и четвертый фильтр низкой частоты, выход которого соединен с вторыми входами третьего сумматора и блока деления выход исполнительного органа соединен -через второй датчик с вторым, входом четвертого блока сравнения, выход второго регулятора соединен через первый блок умножения со вто рым входом первого сумматора, выхо первого регулятора подключен к вто рому входу второго блока сравнения выход первого датчика - к второму входу четвертого сумматора, выход первого задатчика - к второму вход третьего блока сравнения, вход пер вого датчика соединен с выходом объекта управления, введены регистратор, пятый и шестой фильтры низкой частоты, первый масштабируюгцнй блок, второй задатчик, источник постоянного сигнала, последовательно включенные седьмой фильтр низкой частоты, пятый блок сравнения, первый блок определения модуля, второй масштабирующий блок, пятый сумматор, третий масштабирующий блок, инвертор, шестой сумматор и шестой блок сравнения, последовательно включенные восьмой фильтр низкой частоты, седьмой блок сравнения, второй блок определения модуля и чет- . вертый масштабирующий блок, выход которого соединен с вторым входом пятого сумматора, выход блока деления соединен через первый масштабирующий блок с вторым входом шестого сумматора., третий вход которого подключен к выходу второго згщатчика, а выход - к второму входу второго блока умножения, выход первого блока сравнения подключен к входу первого квадратора, выход третьего блока сравнения - к входу второго квадратора, выход первого задатчика соединен с входом седьмого фильтра низкой частоты и через пятый Фильтр низкой частоты - с вторым входом пятого блока сравнения, выход первого датчика соединен с входом восьмого фильтра низкой частоты и через шестой фильтр низкой частоты С- вторым входом седьмого блока сравнения, выход источника постоянного сигнала подключен через шестой блок сравнения к второму входу первого блока умножения, выход первого сумматора - к входу регистратора. В адаптивной системе контроляи регулирования определяется показатель сложности, для чего введены с пятого по восьмой фильтры низкой частоты пятый и седьмой блоки сравнения, блоки определения модуля, второй и четвертый масштабирующие блоки и пятый сумматор. Показатель сложности используется для уточнения весовых коэффициентов модельных управлений. Тем самым осуществляется адаптация по свойствам внешних воздействий и в результате повышается точность регулирования. Адаптивная система может применяться как для контроля переменных, так и для регулирования производственных процессов. В первом случае объектом управления является модель измерителя, первым задатчнком измеритель, а возмущсцощие воздействия на объект упраняения отсутствуют.Во втором случае объектом управления является, например, сталеплавильный агрегат. На чертеже представлена, блок-схема сщаптивной системы контроля и регулирования. На схеме приняты следующие обоз чения:и(1) - управляющее воздейств в t -и момент времени; Y(t) - выхо йая переменная объекаа управления/ W(t) - возмущающее воздействие, Адаптивная система контроля и регулирования содержит первьай блок 1 умножения, первый задатчик 2, первый блок 3 сравнения, первый фильтр 4 низкой частоты, первый регулятор 5, второй блок 6 умножения, первый сумматор 7, исполнительный орган 8, объект управления первый датчик 10; второй сумматор 11, второй датчик 12, второй блок 13 сравнения, первую модель 14 объе та, первый квадратор 15, второй фильтр 16 низкой частоты, третий сумматор 17, блок 18 деления, четвертый суг,1матор 19, третий блок 20 сравнения, третий фильтр 21 низкой частоты, второй регулятор 22, четвертый блок 23 сравнения, вторая модель 24 объекта, второй квадратор 25, четвертый фиЛЬтр 26 низкой частоты, регистратор 27, пятый 28 и шестой 29, фильтры низкой частоты, первый масштабирукадий блок 30, второй задатчик 31, источник 32 постоянного сигнала, седьмой фильтр 33 низкой частоты, пятый блок 34 сравнения, первый блок 35 определения модуля, второй масштабирующий блок 36, пятый.сумматор 37, третий масштабирующий блок 38, инвертор 39, шестой сумматор 40, шестой блок 41 сравнения, восьмой фильтр 42 низкой частоты, седьмой блок 43 сравнения, второй блок 44 определения модуля и четвертый масштабирующий блок 45, Адаптивная система контроля и ре гулирования работает следующим обра зом. Выходная переменная Y(t} объект управления измеряется первым датчиком 10 (в случае системы контроля первый 10 и второй 12 датчики, а та же исполнительный орган 8 являются согласующими блоками, в частности масштабирующими блоками ) и полученный сигнал во втором сумматоре 11 алгебраически суммируется с выходным сигналом первой модели 14 объек та с передаточной функцией, например, вида где К - коэффициент передачи, Т и IT - постоянные времени, В результате на выходе второго сумматор 11 получается выходной сигнал vMt) первого модельного контура регулирования. Сигнал Y(t) поступает на первый блок 3 сравнения, где из нег вычитается сигнал Y(t) о заданном значении Y(t). Полученный сигнал об ошибке регулирования подается на первый фильтр 4 низкой частоты, предназначенный для подавления высокочастотной помехи сигнала, что повышает точность его дальнейшего преобразования. С выхода первого фильтра 4 низкой частоты сигнал поступает на первый регулятор Ь, например, с пропорционально-интегральным законом регулирования. Выходной сигнал этого регулятора является управляющим сигналом U(t) первого модельного контура регулирования. Из сигнала ) во втором блоке 13 сравнения вычитается сигнал U(t) о натурном управлянидем воздействии, поступающем с выхода второго датчика 12, и сигнал о полученной разности идет на вход первой модели 14 объекта. Аналогичным образом работает и второй модельный контур регулирования, включающий четвертый-сумматор 19., третий блок 20 сравнения, третий фильтр 21 низкой частоты, второй регулятор 22, четвертый блок 23 сравнения и вторую модель 24 объекта. Второй регулятор 22 в этом контуре имеет другой, в частности, пропорциональный закон регулирования для того, чтобы компенсировать в отличие от первого модельного контура более быстрые изменения неконтролируемых возмущений. С целью увеличения быстродействия структура или параметры третьего фильтра 21 низкой частоты также отличаются от структуры или параметров первого фильтра 4 низкой частоты. Натурное управляющее воздействие определяется как взвешенная сумма первого и {t) и второгоU-(t) модельных управлякяцих воздействий. Для этого сигнал об U-(t) умножается во втором блоке 6 умножений на сигнал о весовом коэффициенте CiC(t) с выхода шестого сумматора 40 и подается на первый сумматор 7. Сигнал об ui(t) умножается в первом блоке 1 умножения на сигнал 1-d(t о втором весовом коэффициенте, идущий с зыхода шестого блока 41 сравнения. В этом блоке сравнения из выходного сигнала источника 32 постоянного сигнала, равного 1, вычитается сигнал об сЩ с выхода шестого сумматора 40. Выходной сигнал первого блока 1 умножения суммируется с выходным сигналом второго блока 6 в первом сумматоре 7 и подается на исполнительный орган 8 для реализации управляющего воздействия и на регистратор 27. Последний необходим, когда адаптивная система предназначена для контроля сигнала. Весовые коэффициенты адаптируются в зависимости от точности регулирования модельных контуров и показателей сложности выходного сигнала Y{t) и задающего сигнала Y(t по выражению d(t) (t)(tKK5Ps (t), (2 где Rj(t.)- показатель точности, (t P(t) - показатели сложности сигна лов соответственно Y(t) и Y(t), - постоянные коэффициенты., Коэффициенты К -Ку вы.бираются и условия, чтобы od{-t|c (0,1) следую щим образом. Коэффициенты k и являются совыми коэффициентами при показате лях назначаются при настройке система из условия + 1, в частности, К K.g 0,5. Коэффициенты К - Kj определяют по выражениям (X п«п гтт. . - лаксимальнй и ьшниPSмально возможные значения соответст вующих показателей для конкретных у ловий . Для .определения точности регулирования первого модельного контура выходной сигнал первого блока 3 сра нения об ошибке регулированиявозво дится в квадрат в первом квадраторе 15 и усредняется на скользящем интервале времени с помощью второго фильтра 16 низкой частоты. На выходе этого фильтра получается снг нал D(t) о текущей оценке дисперсии ошибки регулирования первого модельного контура. Так же определяется сигнал об оценке дисперсии ошибки регулирования второго модельного контура, для чего используются второй квадратор 25 и четвертый фильтр 26 низкой частоты Сигналы P(tl и l)-(tl суммируются в третьем сумматоре и в блоке 18 деления выходной сигнал четвертого фильтра 26 низкой частоты делится на сигнал о найденной сумме,. В рео показателе точности (t1 )4) (tl который умножается в первом масштабирующем -блоке 30 на коэффициент и подается на шестой сумматор 40, Показатель сложности ,сигнала оценивается по разности его сглаженных значений, полученных с помощью двух фильтров низкой частоты с отличающимся примерно в два раза быстродействием. Увеличение указанной разности свидетельствует о повышении сложности сигнала, что вызывает необходимость использования более быстродействующих контуров регулирования. Последнее обеспечивается за счет увеличения весового коэффициента при управляющем воздействии, вырабатываемым более быстродействующим контуром регулирования. Для определения показателя сложности сигнала Y(t| выходной сигнал первого задатчика 2 поступает на седьмой 33 и пятый 28 фильтры низкой частоты, а затем выходной сигнал питого фильтра 28 низкой частоты ( более быстродействующего ) вычит.ается в пятом блоке 34 сравнения из алходного сигнала седьмого фильтра 33 низкой частоты. Сигнал о полученной разности идет на первый блок 35 определения модуля, где устраняется знак этого сигнала, умножается во втором масштабирующем блоке 36 на постоянный коэффициент к и подается на пятый сумматор 37. Для определения показателя сложности сигнала V(t) Iнад ним производятся аналогичные преобразования с использованием восьмого 42 и шестого 29 фильтров низкой частоты, седььюго блока 43 сравнения, второго блока 44 определения модуля и четвертого 45 масштабирующего блока суммируются в пятом сумматоре 37, сигнал о полученной сумме умножается в третьем масштабирующем блоке 38 на постоянный коэффициент Kj , инвертируется инвертором 39 и подается на вход шее- того сумматора 40. В шестом сумматоре 40 алгебраически суммируются выходные сигналы первого масштабирующего блока 30, инвертора 39 и второго задатчика 31 о величине постоянного коэффициента К, . В результаг получается сигнал о весовом коэффициенте ot.(tj , Результаты полунатурного И промышленного испытания адаптивной систеь4л контроля для управления плавкой стали в дуговых электропечах показывают, что применение
предлагаемой системы позволит повысить точность контроля таких тех нологических переменных как температура и химсостав металла в среднем на 15% и уменьшить диапазон
разброса этих переменных при регулировании процесса плавки металла примерно на 10% по-сравнению с известным регулирующим устройством.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство контроля сигнала | 1980 |
|
SU879793A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР f 2961396, Krt | |||
| С, 05 В 13/02, 1980 | |||
| (прототип). | |||
