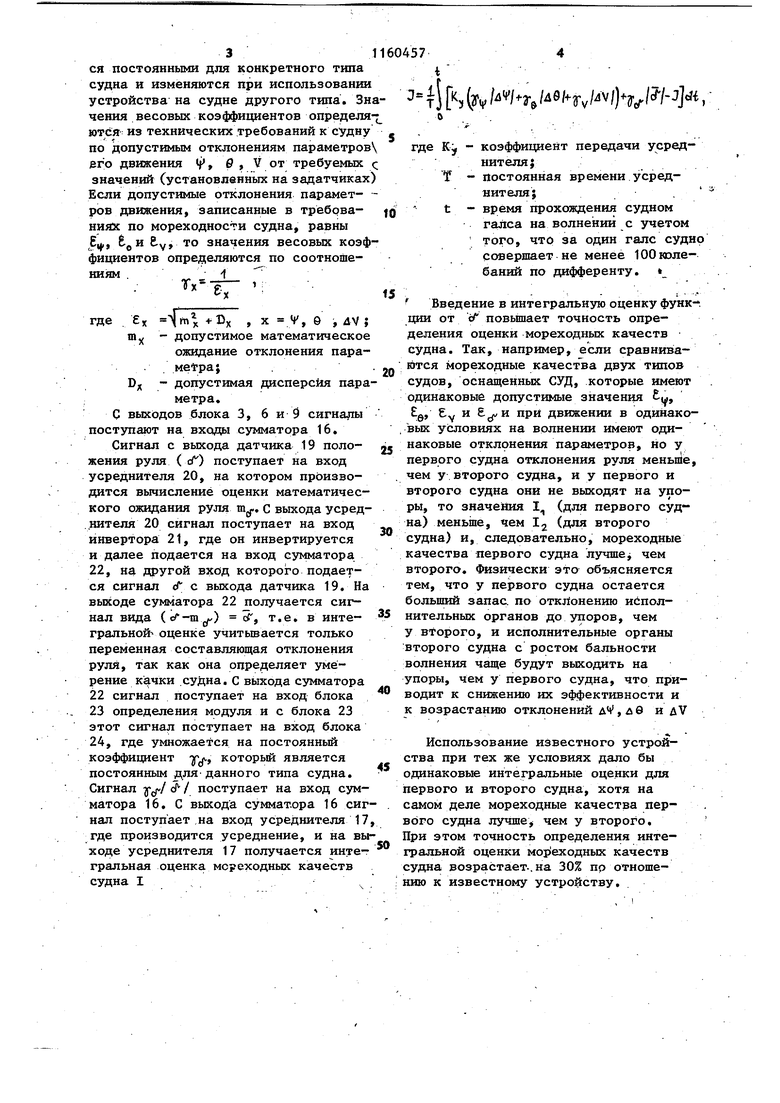
1 Изобретение относится к анапого вой измерительной технй1 е и может быть использовано для вычисления интегральной оценки мореходных , качеств судна. По основному авт.св. № 1020832 известно устройство для оценки мореходных качеств судна, содержащее три идентичных канала диффеjpiBHTa, крена и скорости, каждый из-зкоторых состоит из блока сравнения и блока масштабирования, выходы блоков масштабирования всех каналов подключены к входам первого сумматора, усреднитель, блок индикации, блок задания начальных условий, датчики дифферента, крена и скорости судна, задатчики дифферента, крена и скорости судна,- в каждом канале - блок вычисления модуля . Входы блока сравнения в каждом канале соединены с соответствующими выходами датчика и задатчика,выход блока сравнения в каждом канале через блок вычисления модуля подклю чей к входу блока масштабирования. Выход сумматора соединен с входом усреднителя, а выход последнего с входом блока индикации 1. Однако известное устройство имее недостаточную точность определения интегральной оценки мореходных качеств судна, оснащенных системами управления движением, так как не учитывает отклонения исполнительных: органов (рулей, закрылков), отрабатьюающих сигналы системь управ ления (СУД). При этом введение откл нений исполнительных органов в инте гральную оценку повьш1ает точность определения последней, так как позволяет учесть сопротивляемость судн качке при работе исполнительных ор нов (рулей, закрылков) от сигналов управления СУД. Цель изобретения - повьш1ение то ности оценки мореходных качеств судн Эта достигается тем, что в устройство дата оценки мореходных качеств судна введены последовател соединенные датчик положения руля, второй усреднитель, инвертор, втор сумматор, блок определения модуля напряжения и масштабируюпщй усилитель, выход которого подключен к дополнительному входу первого сумматора, а выход датчика положения руля соединен с другим входом второго сумматора. На чертеже изображена схема предлагаемого устройства. Устройство содержит последовательно соединенные блок 1 сравнения,блок 2 вычисления модуля, блок 3 масштабирования, последовательно соединенные блок 4 сравнения, блок 5 вычисления модуля, блок 6 масштабирования, последовательно соединенные блок 7 сравнения, блок 8 вычисления модуля, блок 9 масштабирования, датчик 10 и задатчик 11 дифферента, выходы которых соединены с первым и вторьм входами блока 1 сравнения, датчик 12 и задатчик 13 крена, выходы которых соединены с первым и вторым входами блока 4 сравнения, датчик 14 и задатчик 15 скорости хода, выходы которых соединены с первьм и вторым входами блока 7 сравнения, после;5 1овательно соединенные первый сумматор 16, первый усреднитель 17 и блок 18 индикации, причем входы первого сумматора 16 соединены с выходами блоков 3, 6 и 9 масштабирования. Устройство дополнительно содержит последовательно соединенные датчик 19 положения руля, второй усреднитель 20, инвертор 21, второй сумматор 22, четвертьй блок 23 определения модуля и масштабирующий усилитель 24. Устройство работает следующим образом. Сигналы с выходов датчика 10, и задатчика 11 дифферента поступает на первый и второй входы блока 1 сравнения соответственно, сигналы с выходов датчика 12 и задатчика 13 крена - на первьш и второй входы блока 4 сравнения, сигналы с выходов датчика 14 и задатчика-15 скорости хода - на первый и второй входы блока 7 сравнения соответственно. Сигналы рассогласования дифферента (л ч), крена ( 4 9 ) и скорости хода (ДУ) с выходов соответствующих блоков 1, 4 и 7 сравнения поступают на входы блоков 2, 5 и 8 вычисления модуля соответственно, с выходов которых сигналы поступают на входы соотвётствукндих блоков 3, 6 и 9 масштабирования, где производится умножение этих сигналов на весовые коэффициенты ТГэ и соответственно. Значения весовых коэффициентов устанавливают
| название | год | авторы | номер документа |
|---|---|---|---|
| Анализатор мореходных качеств судна | 1985 |
|
SU1298781A2 |
| Анализатор мореходных качеств судна | 1983 |
|
SU1120372A1 |
| Устройство для оценки мореходных качеств судна | 1981 |
|
SU1020832A1 |
| Система стабилизации полупогруженного плавучего средства | 1981 |
|
SU958220A1 |
| Система уменьшения бортовой качки и рыскания по курсу судна | 1979 |
|
SU903813A1 |
| Устройство для управления бортовыми рулями успокоителя качки судна | 1983 |
|
SU1147636A1 |
| СПОСОБ ОТКАЗОУСТОЙЧИВОГО УМЕРЕНИЯ КРЕНА СУДНА НА ПОДВОДНЫХ КРЫЛЬЯХ | 2013 |
|
RU2531999C1 |
| Устройство для определения ускорений произвольной точки судна | 1989 |
|
SU1816968A1 |
| Система автоматического управления движением судна | 1980 |
|
SU893672A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА И СИСТЕМА АВТОРУЛЕВОГО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2004 |
|
RU2282884C2 |
УСТРОЙСТВО ДЛЯ ОЦЕНКИ МОРЕХОДНЫХ КАЧЕСТВ СУДНА по авт.св. № 1020832, отличающееся тем, что, с целью повышения точности оце-нки, оно дополнительно содержит последовательно соединенные датчик положения руля, второй усреднитель, инвертор, второй сумматор, блок определения модуля напряжения и масштабирующий усилитель, выход которого подключен к дополнительному входу первого сумматора, а выход датчика положения руля соединен с другим входом второго сумматора.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для оценки мореходных качеств судна | 1981 |
|
SU1020832A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
